一种基于导纳控制的负载转移机构的制作方法
本发明涉及头盔负载转移技术,具体涉及一种基于导纳控制的负载转移机构。
背景技术:
1、头盔是生活中常见的装备,某些特质头盔为了起到最大保护作用,重量偏重,对穿戴者颈部伤害较大。为了让使用者穿戴舒适,在无法减轻头盔自身重量的前提下将负载转移到身体承载能力较强的部位成为了一种选择,目前市面上并没有转移头盔负载的相关研究发明。
2、同时,对于头盔,由于其需要应对冲击,防冲击的材料或装置也需要得到应用。目前已有的防冲击装置一般都设置在头盔内部,这样的装置虽然能起到防冲击的作用,但会加重头盔重量,而且只能缓冲对头部的冲击,减轻对头部的伤害,穿戴者颈部仍然可能因冲击而扭动受伤。
3、因此,本领域需要一种兼顾防冲击与负载转移的装置应用在头盔上,起到对颈部的保护作用。
技术实现思路
1、本发明的目的在于提供一种基于导纳控制的头盔负载转移装置,将控制系统参数可变的导纳控制与简单可靠的多自由度空间机构结合,同时实现头盔负载转移与防冲击的功能。
2、实现本发明目的的技术解决方案为:一种基于导纳控制的负载转移机构,包括多自由度负载空间机构和自适应控制系统;
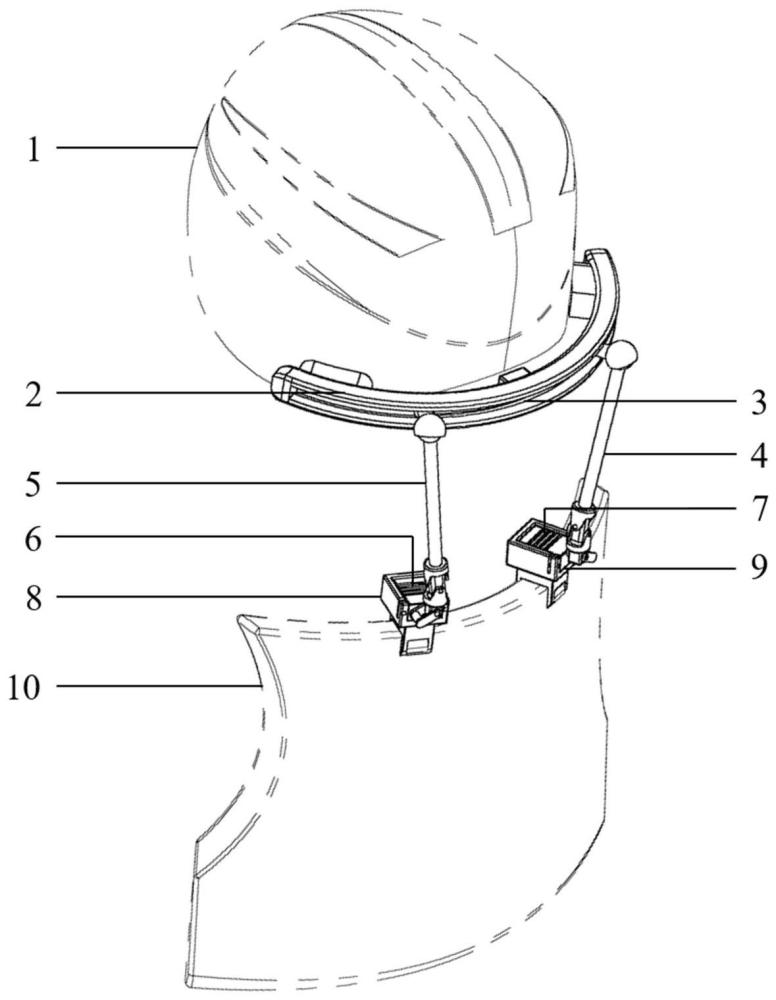
3、多自由度负载空间机构包括滑轨、多自由度空间机构及负载转移支架;所述滑轨布置于头盔的中后部,用于人头部转动时为多自由度机构提供导向;所述多自由度空间机构布置于人头颈后部,上部与滑轨连接,下部与舵机连接;所述负载转移支架位于肩颈后部,用于对舵机进行约束,并向后护板传递载荷;
4、自适应控制系统包括mcu主控模块、感知模块、执行模块和电源模块;mcu主控模块采用导纳控制作为控制方案,通过感知模块检测外部环境对系统的力,通过一个二阶导纳模型,生成一个附加的位置,用此附加的位置去修正预先设定的位置,得到一个新的位置,完成最终的位置控制。
5、与现有技术相比,本发明的有益效果为:
6、(1)负载转移装置整体具有6个自由度,通过引入3个主动驱动和人头部的3个自由度运动,能够实现作战人员头颈部任意姿态的运动及任意位置的锁定,通过感知模块以及头盔连接处的imu能够实时感知并估计头部运动姿态。
7、(2)利用头盔上布置多维度力传感器,感知人头部的姿态,对应控制3处执行机构的偏转角度,可实现在头颈部任意姿态下的头盔减重,并将负载转移装置以及头盔整体重量通过转移结构分散到后护板。
8、(3)在头盔受到冲击后,利用多维度力传感器通过参数识别以及主动保持控制器,将头盔受冲击后剩余力卸载,并在达到人体头颈部运动范围以及力学极限前进行主动姿态保持。
9、(4)头盔负载转移装置通过结构优化减轻系统重量,采用复合材料、铝合金及钛合金等比强度比模量高的材料,进一步减轻结构重量,降低头颈部的负担。基于头颈部生物力学设计,负载转移装置的自由度与控制器参数设计考虑到人体头颈部运动范围、力学分布。
技术特征:
1.一种基于导纳控制的负载转移机构,其特征在于,包括多自由度负载空间机构和自适应控制系统;
2.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述滑轨材料选用超高分子量聚乙烯。
3.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述滑轨结构采用“c”型截面,为适应人头部3个自由度的活动,采用空间弧线轨迹。
4.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述滑轨与滑块组成的移动副,具有一个方向自由度,通过面接触将头盔的重力及冲击载荷传递给空间多自由度机构。
5.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述滑轨通过后方的两处突出结构采用螺钉与头盔连接。
6.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述多自由度空间机构由滑块、支撑杆组成,为空间并联机构,滑块与滑轨组成一个空间移动副,滑块上设置2处球头结构,与支撑杆上端连接,构成2处球形铰链;下部设置两处胡克铰,与舵机配合,实现载荷传递。
7.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述负载转移支架采用钛合金cnc加工成型而成,用于对舵机约束和转移头盔载荷。
8.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述负载转移支架上部设置由凹槽,用于安装舵机,舵机采用两处螺钉与负载转移支架连接。
9.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述负载转移支架下部设置有两处“口”型凹槽卡扣,利用金属材料的弹性变形,与下方机构约束连接。
10.根据权利要求1所述的基于导纳控制的负载转移机构,其特征在于,所述状态感知模块由imu、多维力传感器阵列组成,以检测装备头盔后的受力状态,区别判断属于正常行走、战术动作或者被击中状态。
技术总结
本发明公开了一种基于导纳控制的负载转移机构,包括多自由度负载空间机构和自适应控制系统;多自由度负载空间机构包括滑轨、多自由度空间机构及负载转移支架;所述滑轨布置于头盔的中后部,用于人头部转动时为多自由度机构提供导向;所述多自由度空间机构布置于人头颈后部,所述负载转移支架位于肩颈后部,用于对舵机进行约束,并向后护板传递载荷;自适应控制系统包括MCU主控模块、感知模块、执行模块和电源模块。本发明将控制系统参数可变的导纳控制与简单可靠的多自由度空间机构结合,同时实现头盔负载转移与防冲击的功能。
技术研发人员:王光华,徐嘉伟,杜洁琼,杨真,罗子牛,金永喜,沈迎春,冯晓涵,李少波,张驰,汤来鑫
受保护的技术使用者:杭州智元研究院有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!