一种智能伺服拉链穿头装置的制作方法
本技术属于拉链穿头机,尤其涉及一种智能伺服拉链穿头装置。
背景技术:
1、拉链穿头机是一种将拉链头在穿头工位卡进拉布的链牙上的设备,拉链能够随拉链头的移动而合链或分链。目前的拉链穿头机采用拉布不动、链头移动的方式工作,如中国实用新型专利2021222959001公开了一种拉链穿头装置,包括链布分头组件和链头推送组件;所述链布分头组件,设有用于固定链布两侧的压块和用于分开链布的插刀;所述链头推送组件,设有用于固定链头的抓取组件和驱动抓取组件做往复直线运动的推送气缸;其中,所述链头推送组件用于将链头推入分开的链布中。该拉链穿头装置采用拉布不动、链头移动的方式工作,穿过的成功率低,且更换型号时需要将上料推板更换,对于一些型号小的拉链以及较软的拉链不适用。
2、以此,提出一种智能伺服拉链穿头装置,以解决现有拉链穿头机穿过率低、对于一些型号小的拉链以及较软的拉链不适用等问题。
技术实现思路
1、本实用新型的目的在于提供一种智能伺服拉链穿头装置,旨在解决现有拉链穿头机穿过率低、对于一些型号小的拉链以及较软的拉链不适用等问题。为实现所述目的,本实用新型采用的技术方案是:
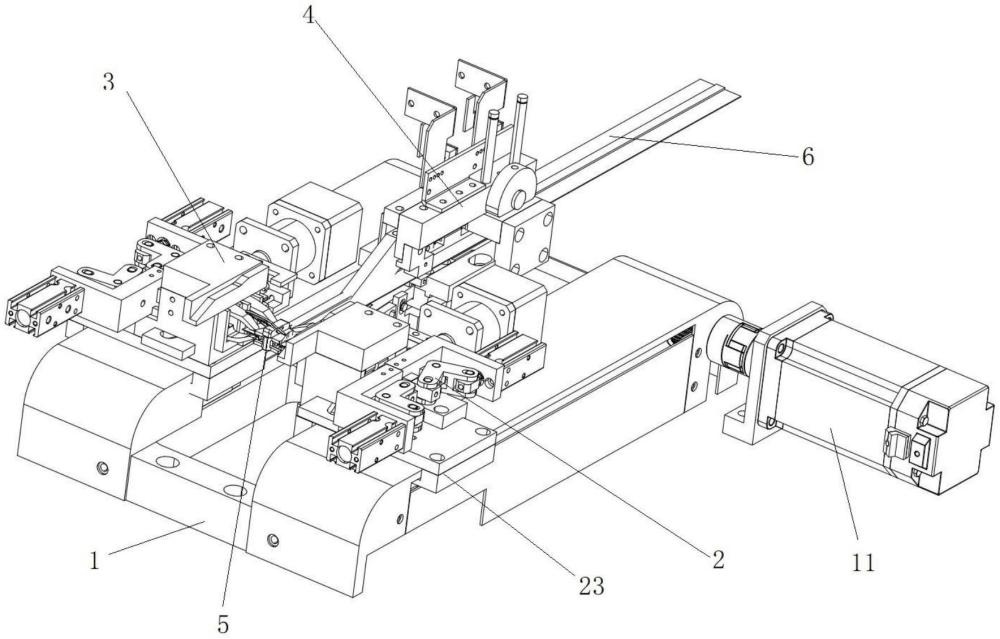
2、一种智能伺服拉链穿头装置,包括底座、夹具以及进料模块,所述底座设有底座电机驱动同步轮转动,所述同步轮带动位于底座两边的同步带运行,所述同步带的靠内一侧设有滑块,所述夹具安装在滑块与同步带上,所述进料模块固定安装在底座的上表面中央。
3、对上述方案的进一步描述,夹具分为左夹具模块与右夹具模块,两个夹具都包括第一夹手、第二夹手、夹具底座以及箱体。所述第一夹手、第二夹手活动安装在箱体与箱盖之间,且箱体固定安装在夹具底座上。夹具底座的下方一侧设有齿条片,同步带与齿条片啮合安装,夹具底座的另一侧固定安装在滑块上,当同步带转动时会带动齿条片,进而带动夹具底座在滑轨上移动。夹具底座的上表面还固定安装有直线马达,直线马达的丝杆末端固定安装有滑片,滑片穿透箱体并位于第一夹手、第二夹手的下方,且滑片上开设有滑槽。
4、对上述方案的进一步描述,第一夹手、第二夹手均包括连接臂、气缸、直角件、锥体、夹臂、套件以及轴承。套件活动式安装在箱体内,套件的底部通过轴承安装在滑槽内。连接臂呈“l”形并固定在套件的端部,气缸固定在连接臂的另一端,且气缸的活塞杆通过直角件与锥体连接,锥体穿透连接臂并与夹臂的端部活动连接。夹臂转动式安装在套件上,气缸的活塞推出带动直角件转动,直角件将锥体推入两个夹臂之间进而将两夹臂的另一末端捏合。
5、对上述方案的进一步描述,丝杆末端固定安装挡片,挡片对应的箱体外侧固定安装有传感器,当直线马达的丝杆推出一定距离时,挡片挡住传感器,传感器反馈到处理器并将直线马达断电。
6、进一步的,所述滑片上的滑槽靠近所述第二夹手的一段与滑片的长端平行,靠近所述第二夹手的一段往第一夹手方向倾斜,所述第二夹手靠近进料模块一侧。
7、更优的,夹具的底部设有感应片,底座设有与感应片对应的传感器,当左夹具模块或右夹具模块运行到一定距离时,感应片将传感器挡住,传感器将信号回传至处理器,进而将底座电机停止。
8、与现有技术相比,本实用新型的有以下有益效果:
9、1、通过设计可移动的左夹具模块与右夹具模块,将链布夹住后主动送入拉链头,可适配多种型号的拉链,无需更换夹具;
10、2、在每个夹具上设计有两个夹手,夹手不仅可以通过气缸捏合,还可通过直线电机的驱动往外拉开,并且第一夹手比第二夹手拉开的幅度大,真实的模拟出人工穿头的动作,实现穿头并将链布拉开的目的,穿头成功率高;
11、3、整机采用伺服驱动并设有多个位置传感器,通过闭环控制设计,极大地提高了精准度及效率。
技术特征:
1.一种智能伺服拉链穿头装置,包括底座(1)、夹具以及进料模块(4),其特征在于:所述底座(1)设有底座电机(11)驱动同步轮(12)转动,所述同步轮(12)带动位于底座(1)两边的同步带(13)运行,所述同步带(13)的靠内一侧设有滑块(14),所述夹具安装在滑块(14)与同步带(13)上,所述进料模块(4)固定安装在底座(1)的上表面中央。
2.根据权利要求1所述的一种智能伺服拉链穿头装置,其特征在于:所述夹具分为左夹具模块(2)与右夹具模块(3),所述夹具包括第一夹手(21)、第二夹手(22)、夹具底座(23)以及箱体(27),所述第一夹手(21)、第二夹手(22)活动安装在箱体(27)与箱盖(271)之间,且箱体(27)固定安装在夹具底座(23)上;
3.根据权利要求2所述的一种智能伺服拉链穿头装置,其特征在于:所述第一夹手(21)、第二夹手(22)均包括连接臂(210)、气缸(211)、直角件(212)、锥体(213)、夹臂(214)、套件(215)以及轴承(2151),所述套件(215)活动式安装在箱体(27)内,套件(215)的底部通过轴承(2151)安装在滑槽(261)内;
4.根据权利要求2所述的一种智能伺服拉链穿头装置,其特征在于:所述丝杆(241)末端固定安装挡片(25),所述挡片(25)对应的箱体(27)外侧固定安装有传感器(251)。
5.根据权利要求3所述的一种智能伺服拉链穿头装置,其特征在于:所述滑片(26)上的滑槽(261)靠近所述第二夹手(22)的一段与滑片(26)的长端平行,靠近所述第二夹手(22)的一段往第一夹手(21)方向倾斜,所述第二夹手(22)靠近进料模块(4)一侧。
6.根据权利要求1-5任一所述的一种智能伺服拉链穿头装置,其特征在于:所述夹具的底部设有感应片,所述底座(1)设有与所述感应片对应的传感器。
技术总结
本技术公开了一种智能伺服拉链穿头装置,属于拉链穿头机技术领域,用于多信号的链布穿头加工。本技术包括底座、夹具以及进料模块,底座设有底座电机驱动同步轮转动,同步轮带动位于底座两边的同步带运行,同步带的靠内一侧设有滑块,夹具安装在滑块与同步带上,进料模块固定安装在底座的上表面中央。本技术通过设计可移动的左夹具模块与右夹具模块,将链布夹住后主动送入拉链头,可适配多种型号的拉链,无需更换夹具;在每个夹具上设计有两个夹手,夹手不仅可以通过气缸捏合,还可通过直线电机的驱动往外拉开,且第一夹手比第二夹手拉开的幅度大,真实的模拟出人工穿头的动作,实现穿头并将链布拉开的目的,穿头成功率高。
技术研发人员:洪兴,刘保,方锋胜
受保护的技术使用者:广东省浩航智能装备科技有限公司
技术研发日:20230803
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!