一种基于CT、MR、PET、B超、X光机、位置传感器等新型放疗系统的设计方法与流程
一种基于ct、mr、pet、b超、x光机、位置传感器等新型放疗系统的设计方法
技术领域
1.本发明公开一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,本系统在放疗治疗过程中,可根据需求采用不同的或综合的医用影像设备对加速器进行影像引导,在保证高精度、高稳定性、高可靠性的基础上,极大降低了整套设备的成本。
背景技术:
2.放疗是肿瘤治疗中的一个重要手段。在放疗过程中,通常针对不同病灶特点和精度要求,需要采用不同医用影像设备的放疗摆位的引导方案。例如,采用mr进行扫描,可实现对低密度物质实现更高精度定位,如神经、软组织。而ct进行扫描,则可实现对高密度物质实现更高精度定位,如骨骼。完成影像引导摆位后,再通过医用加速器等放疗设备进行靶区放疗辐照。
3.目前市场上已有的设备大多依赖进口,且大都采用了一种医用扫描设备配置一台医用加速器连体固定一体化的设计方式,价格一般都非常昂贵。这直接导致了,若医疗机构想使用不同的医用扫描设备进行放疗引导,那必须引进多套放疗设备,而单台设备动辄数千万且占地面积较大,极大的提高了医疗设备采购成本。
4.鉴于上述问题,有必要找到一种灵活、高效和性价比高的医学影像引导放疗系统或方法来解决问题。
技术实现要素:
5.本发明的技术解决问题是:克服现有设备(基本均为进口设备)影像放疗一体化的不足,设计一种新型放疗治疗图像引导系统,在超越原有的影像引导放疗设备性能的基础上,利用多台红外光学传感器,使得多种不同医用影像设备引导的影像可以在三维空间内实现统一的坐标转换,从而实现独立自由式影像引导放疗,极大提高影像引导放疗性能,大大降低设备和维护成本,极大提高国产影像设备的使用率,极大推动中国放疗设备的研制和发展。
6.一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,该系统包括ct、mr、pet、b超、x光机等医用影像设备,以及用于标定和跟踪的光学位置传感器组设备,医用加速器,及特制的放疗摆位影像引导诊治床,以及相关的影像配准、融合、控制和导航软件系统等。
7.一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,包括如下步骤
8.s1:根据临床需要确定病人需使用的医用影像设备,在病人目标上放置多个专用影像定位标识后,通过机械驱动调整影像引导诊治床的方向、角度,将目标移动至对应的医用扫描设备,诸如mr、ct、pet等。
9.在本发明所述光学位置传感器,指包括但不限于红外或激光等位置传感设备;专用影像定位标识包括但不限于点标识(如被高精度红外监控设备识别的红外定位小球等,但是所述领域的技术人员无需创造性劳动,就应该想到采用其他具有明显红外特征的材质制成的其他形状标记物体代替所述的定位小球。因此类似的技术方案也没有超过本发明所公开并要求保护的范围。),也包括面、体标识。安装的光学位置传感器的数量根据场地大小、影像设备性能及数量相关,以保证检测影像引导诊治床的平移和旋转能够在传感器的感知范围内,充分表现出影像引导诊治床在三维空间中三个自由度(三维坐标系中三个方向上的平移和旋转)的高精度变化误差在0.5mm以内。
10.s2:通过光学位置传感器对目标上的定位标识点进行捕获,以获得跟踪pm=(px,py,pz),并传回给计算机控制系统。
11.s3:根据所需要的医用影像设备进行扫描,以获得mr、ct、pet、b超等扫描数据,并将图像传回计算机控制系统。
12.s4:计算机控制系统根据s2所获得的三维坐标数据与s3中所获得的二维图像数据进行靶区锁定后,采用自主研发的影像配准、融合、控制和导航软件系统对病人体位进行引导,继而实现加速器的超精准放疗摆位。
13.本发明的有益效果在于:本发明所述的一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗治疗系统的设计方法,不再采用现今将医用影像设备与加速器设计一体机的方式,而是依据不同的影像临床需求,利用自主研制的软件系统,将不同医用影像设备获得的影像进行配准、融合,再与实际的三维治疗空间实现精准场地配准,控制影像引导诊治床进行准确放疗摆位。
附图说明
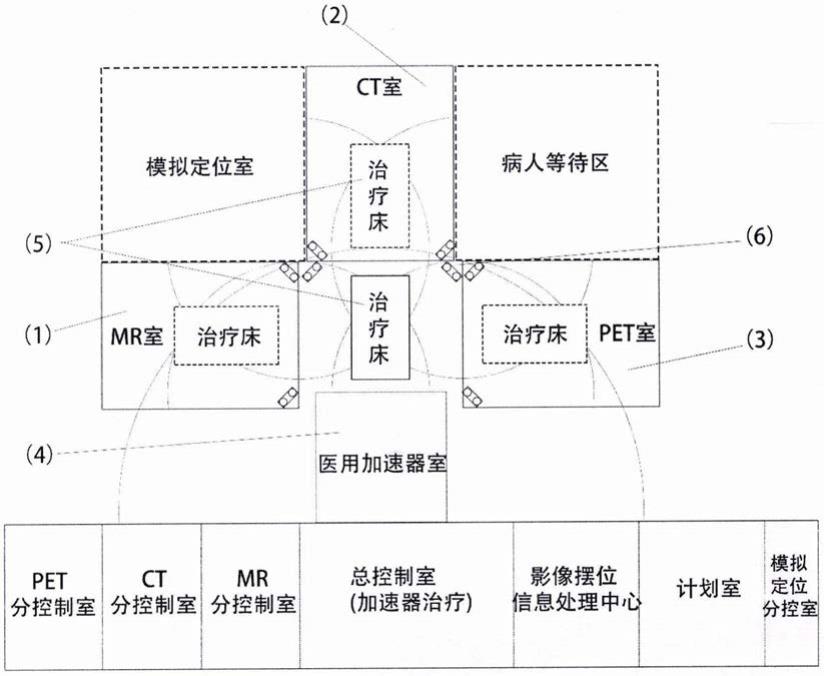
14.图1是本发明的解决方案示意图
15.图2是本发明中光学位置传感器部分解决方案示意图
具体实施方式
16.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
17.图1中,上半部分表示为工作机房,下半部分为机房控制室:(1)是mr医用影像设备室;(2)是ct医用影像设备室;(3)pet医用影像设备室;(4)是医用加速器;(5)是影像引导诊治床及其可移动的位置;(6)是光学位置传感器。
18.图2为定位标记与光学位置传感器示意图。
19.参考图1,固定于相应位置的mr、ct、pet等设备可根据实际需要来选择是否使用,当需要使用时,可控制影像引导诊治床自行移动至该影像设备处;数台光学位置传感器实时跟踪定位标记,以实现高频率、高精度刷新目标所处三维空间内的坐标。
20.参考图2,将跟踪定位标记固定于患者身体上或放疗固定膜上,光学位置传感器通过跟踪其运动及位置,来实现获取患者在三维空间内的坐标情况。图中以三个跟踪定位标记作为举例,实际跟踪定位标记数量可根据需求增加。
技术特征:
1.一种基于ct、mr、pet、b超、x光机、位置传感器等新型放疗系统的设计方法,其特征在于:(1)整套系统采用影像设备与加速器独立和分离的模式,即整套系统采用一台加速器与多种医用扫描设备独立、自由和分离模式;(2)影像引导诊治床可以根据临床影像需要,由计算机控制系统实现方向、角度调整以及移动等;(3)定位标识(包括点、面和体标识)由光学位置传感器进行捕获,并通过系统软件算法实现三维空间位置标定;(4)医用影像设备产生的二维图像数据经光学位置传感器及软件系统处理后,可与三维实际的空间坐标相配准,从而引导加速器实现精准放疗摆位。2.如权利要求1所述的一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,其所述特征(1)的医用影像设备与加速器独立分离模式,即指的是ct、mr、pet、b超、x光机等影像设备不再与加速器一体化设计,而是相互独立,同时各模块可以根据场地、、环境需求等因素实现自由组合,从而实现最大程度的资源利用率,降低设备成本。3.如权利要求2所述的一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,ct、mr、pet等设备采用扇形空间的布局方式,最大程度上提高场地使用率,同时缩短了诊疗床在移动过程的时间。4.如权利要求1所述的一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的的设计方法,其所述特征(2)的影像引导诊治床,不再采用以往治疗床-加速器-影像引导设备三者一体化设计。影像引导诊疗床可根据需求,在计算机控制下进行精准移动和跟踪,同时可执行方向、角度的调整操作。5.如权利要求1所述的一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,其所述特征(3)的三维空间计算,是以采取多幅二维图片中定位标识相匹配的方式进行,该二维图片由不同方向的数台光学传感器进行获取,且实现实时跟踪定位标识以完成更新。光学传感器的数量需根据实际需求进行调整。6.如权利要求1所述的一种基于ct、mr、pet、b超、x光机、位置传感器等的新型放疗系统的设计方法,其所述特征(4),依赖于权利要求5中所获得的数据,并实时更新,从而实现对影像引导诊治床的控制,实现精准放疗摆位。
技术总结
本发明公开一种基于CT、MR、PET、B超、X光机、位置传感器等新型放疗系统的设计方法,能够根据医学影像和红外位置传感器精准位置,进行快速和实时地放疗摆位引导,从而实现精准放疗。该方法可以采用独立的医用成像设备与独立地医用加速器,并设计红外导航定位系统,对影像空间和实际三维治疗空间进行配准和融合,实现对病灶参考中心点的精准锁定及放疗摆位,极大降低了放疗设备的总成本,和现今的医学影像一体式放疗设备相比,具有更高的精准度、更高的性价比和更高的性能优势。的性价比和更高的性能优势。
技术研发人员:葛云
受保护的技术使用者:南京成达医疗科技有限公司
技术研发日:2020.11.06
技术公布日:2022/5/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1