控制外科器械的制作方法
控制外科器械
背景技术:
1.众所周知,使用机器人来辅助和执行外科手术。图1示出了典型的外科机器人系统。外科机器人100包括基座102、臂104和器械106。基座支撑机器人,并且其本身可以牢牢地附接到例如手术室地板、手术室天花板或推车。臂在基座与器械之间延伸。臂借助于沿其长度的多个柔性关节108而铰接,所述多个柔性关节用于将外科器械相对于患者定位在期望位置。外科器械附接到机械臂的远侧端部。外科器械在口处穿透患者的身体,以便进入手术部位。在其远侧端部处,该器械包括用于进行外科手术过程的末端执行器110。在图1中,示出的末端执行器是一对钳口。外科医生经由远程外科医生控制台112控制外科机器人100。外科医生控制台包括一个或多个外科医生输入装置114。这些可以采用手动控制器或脚踏板的形式。外科医生控制台还包括显示器116。
2.控制系统118将外科医生控制台112连接到外科机器人100。控制系统接收来自外科医生输入装置的输入,并将这些输入转换成控制信号以移动机械臂104和末端执行器110的关节。控制系统将这些控制信号发送至机器人,机器人相应地驱动对应的关节。
3.众所周知,末端执行器的钳口由缆线单独地驱动。这些缆线可以用于驱动钳口的打开和闭合,以便抓握和释放它们之间的物体。同一缆线也可以用于驱动钳口的横摆运动,以便使钳口在同一方向上旋转,同时钳口的开口角度保持恒定。由于同一缆线用于驱动钳口的抓握和横摆运动两者,因此这些操作不是独立的。因此,在整个横摆运动范围内不能访问整个抓握运动范围,反之亦然。
4.因此,需要一种更好地调节末端执行器的抓握和横摆运动的相互依赖性的控制系统。
技术实现要素:
5.根据本发明的第一方面,提供一种用于响应于远程外科医生输入装置的操纵而控制外科器械的操纵的控制系统,所述外科器械包括通过铰接联接件连接到轴的能够相对的第一末端执行器元件和第二末端执行器元件,所述铰接联接件包括第一关节,所述第一关节可由第一对驱动元件驱动以便允许所述第一末端执行器元件旋转,以及第二关节,所述第二关节可由第二对驱动元件驱动以便允许所述第二末端执行器元件旋转,所述控制系统被配置成:通过命令将最大力施加到所述第一对驱动元件和所述第二对驱动元件来响应于所述外科医生输入装置的闭合运动,以便使所述第一末端执行器元件和所述第二末端执行器元件以最大闭合力在相反的旋转方向上朝向彼此旋转;并且在检测到所述外科医生输入装置的所述闭合运动已经停止时,命令将所述力折减施加到所述第一对驱动元件和所述第二对驱动元件,从而使得所述第一末端执行器元件和所述第二末端执行器元件两者能够响应于所述外科医生输入装置的横摆运动而在同一旋转方向上旋转。
6.外科医生输入装置可以包括主体和触发器,并且外科医生输入装置的闭合运动包括触发器相对于主体的移动。
7.外科医生输入装置的闭合运动可以包括触发器朝向主体的旋转。
8.外科医生输入装置的闭合运动可以包括触发器相对于主体的线性平移。
9.横摆运动可以包括外科医生输入装置的主体的旋转。
10.外科医生输入装置可以包括用于检测触发器相对于主体的位置的传感器,其中如果所感测到的触发器相对于主体的位置是恒定的,则控制系统检测外科医生输入装置的闭合运动已经停止。
11.控制系统可以包括单极滤波器,其接收从所感测到的触发器相对于主体的位置导出的触发器的速度,并输出力折减系数。
12.控制系统可以被配置成通过以下方式命令将最大力施加到第一对驱动元件和第二对驱动元件:将第一最大力施加到第一对驱动元件的第一驱动元件,以及将第二最大力施加到第二对驱动元件的第二驱动元件,其中第一最大力和第二最大力的大小是相同的。
13.控制系统可以被配置成通过以下方式命令将最大力施加到第一对驱动元件和第二对驱动元件:将第一最大力施加到第一对驱动元件的第一驱动元件,以及将第二最大力施加到第二对驱动元件的第二驱动元件,其中第一最大力和第二最大力的大小不同。
14.第一最大力和第二最大力可以是张力。
15.第一对驱动元件和第二对驱动元件中的每一者可以包括缆线。
16.控制系统可以被配置成通过取决于器械类型和/或触发器运动的函数来命令将力折减施加到第一对驱动元件和第二对驱动元件。
17.最大闭合力可以使得能够在第一末端执行器元件与第二末端执行器元件之间切割物体。
18.在控制系统检测到外科医生输入装置的闭合运动已经停止时,第一末端执行器元件和第二末端执行器元件可以在闭合构型中彼此邻接。
19.控制系统可以被配置成通过命令以下来响应于外科医生输入装置的横摆运动:将第一力施加到第一对驱动元件的第一驱动元件,以及将第二力施加到第二对驱动元件的第一驱动元件,其中第一力和第二力的大小是相同的。
20.能够相对的第一末端执行器元件和第二末端执行器元件可以是一对剪刀。一对剪刀可以是一对弯曲剪刀。一对剪刀可以是一对单极剪刀。
21.根据本发明的第二个方面,提供一种用于响应于远程外科医生输入装置的操纵而控制外科器械的操纵的控制系统,所述外科器械包括通过铰接联接件连接到轴的能够相对的第一末端执行器元件和第二末端执行器元件,所述铰接联接件包括第一关节,所述第一关节可由第一对驱动元件驱动以便允许所述第一末端执行器元件旋转,以及第二关节,所述第二关节可由第二对驱动元件驱动以便允许所述第二末端执行器元件旋转,所述控制系统被配置成:通过命令将最大力施加到所述第一对驱动元件和所述第二对驱动元件来响应于所述外科医生输入装置的抓握构型,以便使所述第一末端执行器元件和所述第二末端执行器元件以最大闭合力在相反的旋转方向上朝向彼此旋转;并且在检测到所述外科医生输入装置的横摆运动时,命令将所述力折减施加到所述第一对驱动元件的第一驱动元件,由此使得所述第一末端执行器元件和所述第二末端执行器元件两者能够在同一旋转方向上旋转。
22.在检测到外科医生输入装置的横摆运动时,控制系统可以被配置成继续命令将最大力施加到第二对驱动元件的第二驱动元件。
23.外科医生输入装置可以包括主体和触发器,并且当触发器具有相对于主体在指定范围内的位置时,外科医生输入装置可以处于抓握构型。
24.外科医生输入装置的抓握构型可以包括触发器相对于主体的旋转位置,该旋转位置在指定的旋转位置范围内。
25.外科医生输入装置的抓握构型可以包括触发器相对于主体的线性位置,该线性位置在指定的线性位置范围内。
26.横摆运动可以包括外科医生输入装置的主体的旋转。
27.外科医生输入装置可以包括用于检测触发器相对于主体的位置的传感器。
28.控制系统可以包括单极滤波器,其接收从所感测到的触发器相对于主体的位置导出的触发器的速度,并输出力折减系数。
29.控制系统可以通过以下方式命令将最大力施加到第一对驱动元件和第二对驱动元件:将第一最大力施加到第一对驱动元件的第一驱动元件,以及将第二最大力施加到第二对驱动元件的第二驱动元件,其中第一最大力和第二最大力的大小是相同的。
30.控制系统可以通过以下方式命令将最大力施加到第一对驱动元件和第二对驱动元件:将第一最大力施加到第一对驱动元件的第一驱动元件,以及将第二最大力施加到第二对驱动元件的第二驱动元件,其中第一最大力和第二最大力的大小是不同的。
31.第一最大力和第二最大力可以是张力。
32.第一对驱动元件和第二对驱动元件中的每一者可以包括缆线。
33.控制系统可以被配置成通过取决于器械类型和/或触发器运动的函数来命令将力折减施加到第一对驱动元件和第二对驱动元件。
34.最大闭合力可以使得能够在第一末端执行器元件与第二末端执行器元件之间抓握物体。
35.能够相对的第一末端执行器元件和第二末端执行器元件可以是持针器。能够相对的第一末端执行器元件和第二末端执行器元件可以是一对钳口。
36.根据本发明的第三个方面,一种用于响应于远程外科医生输入装置的操纵而控制外科器械的操纵的控制系统,所述外科器械包括通过铰接联接件连接到轴的能够相对的第一末端执行器元件和第二末端执行器元件,所述铰接联接件包括第一关节,所述第一关节可由第一对驱动元件驱动以便允许所述第一末端执行器元件旋转,以及第二关节,所述第二关节可由第二对驱动元件驱动以便允许所述第二末端执行器元件旋转,所述控制系统被配置成:通过以下方式响应于所述外科医生输入装置的闭合运动:将所述第一末端执行器元件的要求的第一横摆力矩与第一最大横摆力矩进行比较,并且将所述第二末端执行器元件的要求的第二横摆力矩与第二最大横摆力矩进行比较,并且仅当所要求的第一横摆力矩小于所述第一最大横摆力矩,并且所要求的第二横摆力矩小于所述第二最大横摆力矩时,命令将所要求的第一横摆力矩施加到所述第一末端执行器元件,并且将所要求的第二横摆力矩施加到所述第二末端执行器元件,以便使所述第一末端执行器元件和所述第二末端执行器元件以闭合力在相反的旋转方向上朝向彼此旋转;并且在检测到所述外科医生输入装置的横摆运动时,命令将共向力施加到所述第一对驱动元件和所述第二对驱动元件,由此使所述第一末端执行器元件和所述第二末端执行器元件两者在同一旋转方向上旋转。
37.如果所要求的第一横摆力矩大于第一最大横摆力矩,并且所要求的第二横摆力矩
大于第二最大横摆力矩,则控制系统可以命令将第一最大横摆力矩施加到第一末端执行器元件并且将第二最大横摆力矩施加到第二末端执行器元件,以便使第一末端执行器元件和第二末端执行器元件以闭合力在相反的旋转方向上朝向彼此旋转。
38.控制系统还可以通过以下方式响应于外科医生输入装置的闭合运动:将第一末端执行器元件的所要求的第一横摆力矩与第一最小横摆力矩进行比较,并且将第二末端执行器元件的所要求的第二横摆力矩与第二最小横摆力矩进行比较,并且仅当所要求的第一横摆力矩大于第一最小横摆力矩并且所要求的第二横摆力矩大于第二最小横摆力矩时,命令将所要求的第一横摆力矩施加到第一末端执行器元件,并且将所要求的第二横摆力矩施加到第二末端执行器元件,以便使第一末端执行器元件和第二末端执行器元件以闭合力在相反的旋转方向上朝向彼此旋转。
39.如果所要求的第一横摆力矩小于第一最小横摆力矩,并且所要求的第二横摆力矩小于第二最小横摆力矩,则控制系统可以命令将第一最小横摆力矩施加到第一末端执行器元件并且将第二最小横摆力矩施加到第二末端执行器元件,以便使第一末端执行器元件和第二末端执行器元件以闭合力在相反的旋转方向上朝向彼此旋转。
附图说明
40.现在将参考附图以举例的方式描述本发明。在附图中:
41.图1示出了执行外科手术过程的外科机器人系统;
42.图2示出了示例性外科器械的远侧端部;
43.图3示出了示例性外科医生输入装置;
44.图4是控制外科器械的操纵的方法的流程图;
45.图5是控制另一外科器械的操纵的方法的流程图;并且
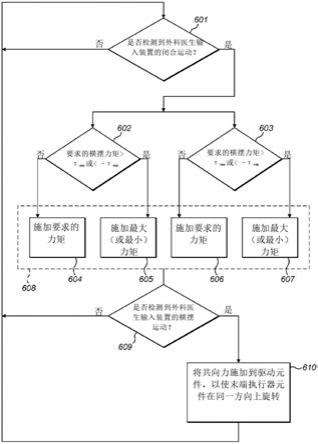
46.图6是控制另一外科器械的操纵的方法的流程图。
具体实施方式
47.下文描述了从远程外科医生控制台控制外科机器人器械。器械和控制台形成图1所示的类型的外科机器人系统的一部分。
48.外科器械由机械臂支撑。机械臂自身由基座支撑。在外科手术期间,将基座固定到手术室的一部分,例如地板、天花板、推车或患者床。机械臂始终保持在患者的外部。机械臂包括散布有关节的一系列臂连杆。这些关节可以是转动关节。机械臂远离基座的端部可以通过关节中的一个或多个的移动而相对于基座铰接。外科器械附接到机械臂的远侧端部处的驱动组件。此附接点位于患者外部。
49.外科器械具有细形轮廓,其中轴跨越在其附接到机械臂的近侧端部与进入患者体内的手术部位的其远侧端部之间。外科器械的近侧端部和器械轴可以相对于彼此是刚性的,并且在附接到机械臂时相对于机械臂的远侧端部是刚性的。向患者体内形成切口,通过该切口插入口。外科器械通过口穿透患者身体,以便进入手术部位。替代地,外科器械可以通过身体的自然孔道穿透身体以进入手术部位。在器械的近侧端部处,轴连接到器械接口。器械接口与机械臂的远侧端部处的驱动组件接合。具体地说,器械接口的各个器械接口元件接合驱动组件的各个驱动组件接口元件。器械接口可与驱动组件可释放地接合。器械可
以手动地从机械臂上拆卸,而不需要任何工具。这使得器械能够在操作过程中快速地从驱动组件上拆卸,并附接另一器械。
50.在外科器械的远侧端部处,轴通过铰接联接件连接到末端执行器。末端执行器在手术部位处参与外科手术过程。图2示出了具有作为末端执行器201的一对钳口的示例性器械的远侧端部。轴202通过铰接联接件203连接到末端执行器201。铰接联接件203包括若干关节。这些关节使得末端执行器的姿态能够相对于器械轴的方向改变。末端执行器还可以包括关节。在图2的实例中,铰接联接件203包括俯仰关节204。俯仰关节204绕垂直于轴202的纵向轴线206的俯仰轴线205旋转。俯仰关节204允许支撑主体(下文描述)且因此允许末端执行器绕俯仰轴线205相对于轴旋转。在图2的实例中,末端执行器包括第一横摆关节207和第二横摆关节211。第一横摆关节207绕第一横摆轴线208旋转。第二横摆关节211绕第二横摆轴线212旋转。横摆轴线208和212都垂直于俯仰轴线205。横摆轴线208和212可以是平行的。横摆轴线208和212可以是共线的。铰接联接件203包括支撑主体。在一端部处,支撑主体通过俯仰关节204连接到轴202。在另一端部处,支撑主体通过横摆关节207和211连接到末端执行器201。为了便于说明,从图2中省略了该支撑体,以便更容易看到铰接联接件的其他结构。末端执行器包括两个末端执行器元件209、210。所示的末端执行器元件是相对的钳口。然而,末端执行器元件可以是任何类型的相对末端执行器元件,其进一步的实例稍后论述。第一横摆关节207与第一末端执行器元件209快速结合,并且允许第一末端执行器元件209绕第一横摆轴线208相对于支撑主体和俯仰关节204旋转。第二横摆关节211与第二末端执行器元件210快速结合,并且允许第二末端执行器元件210绕第二横摆轴线212相对于支撑主体和俯仰关节204旋转。
51.图2所示的关节由一对驱动元件驱动。驱动元件是细长的。它们横向于其纵向范围是柔性的。它们沿其纵向范围抵抗压缩和张力。每对驱动元件在器械轴的另一端部处固定到器械接口的相应器械接口元件。因此,机械臂按如下方式将驱动力传递到末端执行器:驱动组件接口元件的移动移动器械接口元件,器械接口元件移动移动铰接部的一个或多个关节的驱动元件和/或移动末端执行器的末端执行器。驱动元件可以是缆线。驱动元件可以包括柔性部分和刚性部分。柔性部分接合器械接口和铰接联接件的部件,并且刚性部分延伸通过器械轴的全部或部分。例如,柔性部分可以是缆线,并且刚性部分可以是辐条。
52.图2示出了第一对驱动元件a1、a2,其被约束以绕第一横摆关节207移动。驱动元件a1、a2驱动第一末端执行器元件209绕第一横摆轴线208的旋转。图2示出了第二对驱动元件b1、b2,其被约束以绕第二横摆关节211移动。驱动元件b1、b2驱动第二末端执行器元件210绕第二横摆轴线212的旋转。图2还示出了第三对驱动元件c1、c2,其被约束以绕俯仰关节204移动。驱动元件c1、c2驱动末端执行器201绕俯仰轴线205的旋转。俯仰关节204和横摆关节207、211独立地由其相应的驱动元件驱动。
53.末端执行器元件209和210可独立地旋转。末端执行器元件可以在相反的旋转方向上旋转。例如,通过向驱动元件a2和b1施加张力,末端执行器元件可以在相反的旋转方向上朝向彼此旋转。这一起闭合了末端执行器元件,其可用于(i)抓握诸如组织或针或线的末端执行器元件之间的物体,和/或(ii)切割诸如组织或线的末端执行器元件之间的物体。通过向驱动元件a1和b2施加张力,末端执行器元件可以在相反的旋转方向上背离彼此旋转。这打开了末端执行器元件,其可用于(i)释放已经在末端执行器元件之间抓握的物体,和/或
(ii)重新打开一对剪刀式末端执行器元件,以便进行另一切割动作。通过向驱动元件a1和b1或替代地a2和b2施加张力,两个末端执行器元件可以在同一旋转方向上旋转。这使末端执行器元件绕枢轴轴线208和212横摆。这对于使得末端执行器能够进入手术部位的不同部分是有用的。替代地,通过仅向驱动元件a1、a2、b1、b2中的一个驱动元件施加张力,一个末端执行器元件可以旋转(在任一旋转方向上)而另一末端执行器元件保持在适当位置。因此,通过操纵同一对驱动元件:用于第一末端执行器元件209的a1、a2和用于第二末端执行器元件210的b1、b2来实现末端执行器的抓握运动和横摆运动。
54.存在与以下描述相关的具有能够相对的末端执行器的至少两种类型的器械。第一种类型是切割器械,末端执行器元件与其接合以便在末端执行器元件之间切割组织或另一物体。第二种类型是抓握器械,末端执行器元件与其接合以便在末端执行器元件之间抓握组织或另一物体。
55.外科医生控制台包括一个或多个外科医生输入装置。每个外科医生输入装置使得外科医生能够向控制系统提供控制输入。外科医生输入装置可以是例如手动控制器、脚踏控制器(诸如脚踏板)、将由手指或身体其他部分控制的触敏输入、语音控制输入装置、眼睛控制输入装置或手势控制输入装置。外科医生输入装置可以提供外科医生可以单独操作的若干输入。
56.图3示出了示例性手动控制器300。手动控制器例如通过万向布置(未示出)连接到外科医生控制台。这使得手动控制器能够相对于外科医生控制台以三个平移自由度移动。所示的手动控制器旨在通过右手握住。镜像手动控制器可以通过左手握住。手动控制器包括适用于由手部抓握的主体301。手动控制器可以包括附加输入,例如按钮、开关、操纵杆、滑动输入或轨迹垫303。图3的手动控制器包括触发器302。触发器302可相对于主体301移动。在所示的手动控制器中,触发器302可相对于主体301旋转。替代地或另外,触发器可以相对于主体301线性地平移。
57.外科医生可以相对于手动控制器的主体301旋转触发器302,以便命令器械的末端执行器元件209、210在抓握/闭合运动中闭合或在释放/打开运动中打开。例如,外科医生可以将触发器302朝向手动控制器的主体301旋转以命令抓握运动。外科医生可以背离手动控制器的主体301旋转触发器302以命令释放运动。外科医生可以在手动控制器工作空间中旋转手动控制器的主体以命令改变末端执行器元件的取向。
58.控制系统将外科医生控制台连接到外科机器人。控制系统包括处理器和存储器。存储器以非暂态方式存储软件代码,该软件代码可以由处理器执行以使处理器以本文描述的方式控制外科医生控制台和机械臂和器械。控制系统接收来自外科医生输入装置的输入,并将这些输入转换成控制信号以移动机械臂的关节和/或铰接联接件的关节和/或末端执行器的关节。控制系统将这些控制信号发送至机械臂,机械臂相应地驱动对应的关节。由此,控制系统响应外科医生输入装置的操纵而控制外科器械的操纵。
59.当控制系统控制切割器械时,在检测到手动控制器的闭合运动时,控制系统通过命令将力施加到末端执行器元件的驱动元件来响应,以使末端执行器元件在相反的旋转方向上朝向彼此旋转。参考图2,控制系统通过命令将力施加到a2和b1来响应于检测闭合运动,由此使末端执行器元件闭合在一起。
60.当控制系统控制抓握器械时,在检测到手动控制器处于抓握构型时,控制系统通
过命令将力施加到末端执行器元件的驱动元件来响应,以使末端执行器元件在相反的旋转方向上朝向彼此旋转。参考图2,控制系统通过命令将力施加到a2和b1来响应于检测抓握构型,由此使末端执行器元件闭合在一起。手动控制器的抓握构型是其中触发器相对于主体的旋转位置在指定范围内的构型。指定范围可以是预定的。指定范围可以取决于器械类型。对于触发器相对于主体线性地平移的情况,手动控制器的抓握构型是其中触发器相对于主体的线性位置在指定范围内的构型。指定范围可以取决于器械类型。指定范围可以是预定的。
61.对于抓握动作,末端执行器元件的高抓握力可能是期望的。例如,如果末端执行器是针驱动器,则期望高抓握力以实现在驱动到组织中时牢固地握住针。作为另一实例,如果末端执行器是一对剪刀,则期望高闭合力以实现组织的成功切割。因此,控制系统通过命令将最大力施加到驱动元件来响应于检测到手动控制器(抓握器械)的抓握构型或手动控制器(切割器械)的闭合运动,以便使末端执行器元件的最大闭合力。参考图2,控制系统通过命令将最大力施加到a2和将最大力施加到b1来响应。这导致末端执行器元件209和210以最大闭合力朝向彼此旋转,并且由此使得末端执行器能够以最大力抓握/切割。
62.如果驱动元件在张力中驱动,如图2的实例,则施加到驱动元件的最大力是张力。每个最大力是可以施加到该驱动元件而不使其失效的最大张力,例如通过拉伸或折断。如果驱动元件在压缩中驱动,则施加到驱动元件的最大力是压缩力。每个最大力是可以施加到该驱动元件而不使其失效的最大压缩力,例如通过压缩或压裂。如果驱动元件在张力和压缩两者中驱动,例如如果驱动元件是推杆,则限定最大张力和最大压缩力。最大张力是在张力中可以施加到驱动元件而不使其失效的最大力。最大压缩力是在压缩中可以施加到驱动元件而不使其失效的最大力。如果驱动元件是以扭力驱动的,例如如果驱动元件是丝杠,则施加到驱动元件的最大力是扭转力。每个最大力是可以施加到该驱动元件而不使其失效的最大扭转力。
63.控制系统命令将第一最大力施加到驱动元件来驱动第一末端执行器元件朝向第二末端执行器元件的旋转。在图2的实例中,控制系统命令将第一最大力施加到a2,以驱动末端执行器元件209朝向末端执行器元件210旋转。控制系统命令将第二最大力施加到驱动元件,以驱动第二末端执行器元件朝向第一末端执行器元件的旋转。在图2的实例中,控制系统命令将第二最大力施加到b1,以驱动末端执行器元件210朝向末端执行器元件209旋转。
64.第一最大力的值和第二最大力的值可以取决于器械类型。第一最大力和第二最大力可以是相同的。例如,如果末端执行器元件匹配并且驱动这些末端执行器元件中的每一者的驱动元件匹配,如图2的实例中,则控制系统可以命令将相同最大力施加到第一驱动元件a2和第二驱动元件b1两者。替代地,第一最大力和第二最大力可以是不同的。例如,如果末端执行器元件是不同的,则施加到第一末端执行器元件的第一最大驱动力可以不同于施加到第二末端执行器元件的第二最大驱动力,以便实现末端执行器元件的期望的最大闭合力。此实例是不对称器械(诸如订书机)。
65.对于抓握器械,最大闭合力足以使得能够在第一末端执行器元件与第二末端执行器元件之间抓握物体。这种抓握可以在阻力下进行,例如针驱动器在将针牢固地驱动到组织中的同时抓握针。例如,最大闭合力可以在10-15n的范围内。对于切割器械,最大闭合力
足以使得能够在第一末端执行器元件与第二末端执行器元件之间切割物体(通常是组织)。例如,最大闭合力可以在5-10n的范围内。
66.在检测到手动控制器工作区中的手动控制器的主体的旋转时,控制系统通过命令以下中的任一者或组合进行响应:(i)外科机械臂的关节,(ii)外科器械的铰接联接件203的关节,以及(iii)末端执行器的关节。该命令的铰接使得末端执行器的姿态根据外科医生旋转手动控制器的指示而改变。
67.因此,控制系统可以至少部分地通过命令将力施加到末端执行器元件的驱动元件以使末端执行器元件旋转来响应于对手动控制器的主体的旋转的检测。例如,参考图2,控制系统可以命令将力施加到a2和b2以使末端执行器元件209和210在顺时针方向上横摆。控制系统可以命令将力施加到a1和b1以使末端执行器元件209和210在逆时针方向上横摆。控制系统可以命令将相同力施加到a1和b1(或a2和b2)两者。如果末端执行器元件匹配,并且那些末端执行器元件的驱动元件匹配,则将相同力施加到a1和b1(或a2和b2)两者使两个末端执行器元件一致地横摆。控制系统还可以通过命令将力施加到c1和c2中的一者以使俯仰关节204的旋转来响应于对手动控制器的主体的旋转的检测。控制系统还可以通过命令将力矩施加在机械臂的关节中的一个或多个周围来响应于对手动控制器的主体的旋转的检测。
68.同一驱动元件a1、a2和b1、b2用于驱动用于抓握/切割物体和使末端执行器横摆两者的末端执行器元件的旋转。因此,抓握/切割和横摆操作不是独立地驱动的。因此,当在抓握/切割操作中向驱动元件a2和b1施加最大力时,末端执行器元件也无法横摆。考虑到图2的实例,当向a2和b1施加最大张力以使抓握/切割动作时,也不可能向a2和b2施加张力以引起末端执行器元件的横摆运动。
69.图4示出了由控制系统实现以调节切割器械的末端执行器的切割和横摆运动的相互依赖性的方法。
70.在步骤401处,控制系统检测外科医生的输入装置是否存在闭合运动。对于图3的外科医生输入装置的实例,如果触发器302相对于手动控制器的主体301旋转,则控制系统检测闭合运动。如果触发器302相对于手动控制器的主体是静止的(在其旋转范围中的任何地方),则控制系统确定不存在闭合运动。然而,如果触发器302相对于手动控制器的主体301旋转,则控制系统确定存在闭合运动。
71.手动控制器300可以包括感测触发器302相对于手动控制器的主体301的旋转位置的定位传感器。定位传感器可以按间隔(例如规则间隔)感测旋转位置。例如,传感器可以感测在m khz的频率下的旋转位置。m可以介于10khz与50khz之间。m可以介于25khz与35khz之间。控制系统接收来自定位传感器的触发器的所感测到的旋转位置。传感器可以按间隔(例如规则间隔)将所感测到的位置发送至控制系统。例如,传感器可以在n khz的频率下将触发器的所感测到的旋转位置发送至控制系统。n可以介于1与10khz之间。n可以介于3.5与6.5khz之间。n可以是5khz。控制系统根据所感测到的一系列触发器的旋转位置来确定触发器的速度。如果触发器朝向主体的速度大于0,则控制系统确定手动控制器的闭合运动是正在进行的。如果触发器的速度是0,则控制系统确定手动控制器的闭合运动已经停止。换句话说,如果所感测到的触发器的旋转位置是恒定的,则控制系统确定手动控制器的闭合运动已经停止。闭合运动可能已经由外科医生停止,因为触发器处于其运动范围的末端。当第
一末端执行器元件和第二末端执行器元件在闭合构型中邻接时,就会发生这种情况。例如,一对剪刀的刀片在切割动作结束时已经碰到。替代地,在末端执行器元件仍处于打开构型时,闭合运动可能已经停止。在该打开构型中,末端执行器元件朝向彼此且因此朝向闭合构型进一步旋转是可能的,但外科医生在达到闭合构型之前停止切割动作。
72.如果在步骤401处,控制系统检测到外科医生输入装置的闭合运动,则其移动到步骤402。在步骤402处,控制系统命令将最大相对力施加到末端执行器元件的驱动元件,以便使末端执行器以最大驱动力闭合。在图2的实例中,这将对a2和b1施加最大驱动力。此后,控制回路返回到步骤401,其中对是否检测到闭合运动进行进一步评估。
73.如果在步骤401处,控制系统未检测到外科医生输入装置的闭合运动,则其移动到步骤403。在步骤403处,控制系统命令将折减的力施加到驱动元件,该驱动元件使末端执行器元件闭合。在图2的实例中,这将折减施加到a2和b1的驱动力。
74.力折减到驱动元件的系数可以取决于器械类型。力折减值可以仅取决于器械类型。每种器械类型的力折减值可以通过经验确定。力折减值可以仅取决于器械类型的器械类型的实例是钳口和有孔抓握器。作为器械类型的替代或附加,力折减的系数可以取决于触发器运动的轮廓。力折减值可能另外取决于触发器运动的轮廓的器械类型的实例是持针器和剪刀,诸如弯曲剪刀和单极剪刀。
75.控制系统可以包括单极滤波器,其接收作为输入的触发器的速度。单极滤波器利用触发速度来确定力折减值。滤波器的参数可以是特定于器械类型的。滤波器可以是线性的。
76.例如,滤波器可以是具有由以下所给出的加权值的一阶导数低通滤波器:
77.cutweight[n]=a*cutweight[n
–
1]+tposition[n]
–
tposition[n
–
1](方程1)
[0078]
其中cutweight[n]是触发器的第n感测位置的加权值,a是常数,cutweight[n-1]是触发器的第n-1感测位置的加权值,tposition[n]是触发器的第n感测位置,并且tposition[n-1]是触发器的第n-1感测位置。该加权值提供可以用于评估是否检测到外科医生输入装置的闭合运动的阈值。
[0079]
如果cutweight[n]小于阈值y
cut
,则应用weightcut的力折减值。如果cutweight[n]大于阈值y
yaw
,则应用weightyaw的力折减值。如果cutweight[n]在y
cut
与y
yaw
之间,则力折减值为:
[0080][0081]
其中frv[n]是针对触发器的第n感测位置的力折减值。
[0082]
weightcut,weightyaw,y
cut
,y
yaw
和a都是常数。例如,weightcut可以是0。weightyaw可以是0.8。
[0083]
在步骤403处施加到驱动元件的折减的力可以通过以下给出:
[0084]
reducedforce[n]=(1
–
frv[n])*maximumforce(方程3)
[0085]
其中reducedforce[n]是针对触发器的第n感测位置的折减的力,并且maximumforce是在检测到外科医生的输入装置的闭合运动之后在步骤402中施加的最大力。
[0086]
因此,在weightcut是0的实例中,当cutweight[n]≤y
cut
时,施加到驱动元件的力
未折减,即reduced force=maximum force。在weightyaw是0.8的实例中,当cutweight[n]≥y
yaw
时,施加到驱动元件的力折减80%,即reduced force=0.2*maximum force。
[0087]
当cutweight是0时,不向驱动元件施加力减小。因此,可以将最大力施加到末端执行器元件的闭合运动。当cutweight是1时,可以施加最大力以提供末端执行器元件的横摆运动。
[0088]
通过折减施加到驱动元件的力,那些驱动元件能够横摆末端执行器元件。在图2的实例中,可以驱动a1和b1(或a2和b2)两者以使末端执行器整体在顺时针(或逆时针)方向上横摆。施加到末端执行器元件的闭合力的折减越大,可以横摆末端执行器元件的速度越大。因此,虽然图4的控制方法优先考虑了末端执行器的闭合运动,但当末端执行器元件不朝向彼此主动移动时,它针对横摆末端执行器元件的能力进行权衡。即使末端执行器元件尚未闭合,在持续的时间段内维持最大闭合力对切割动作也没有多大帮助。因此,一旦闭合运动已经停止,优先考虑末端执行器的横摆能力对同时切割动作几乎没有不利影响。
[0089]
返回图4,在步骤403处的力折减之后,该方法移动到步骤404。在步骤404处,控制系统确定是否检测到外科医生输入装置的闭合运动。该步骤使用参考步骤401描述的方法来实现。如果检测到闭合运动,则控制回路移动到步骤402,其中控制系统命令将最大相对力施加到驱动元件,以便使末端执行器元件以最大闭合力闭合。
[0090]
然而,如果在步骤404处,未检测到闭合运动,则控制系统移动到步骤405。在步骤405处,控制系统确定是否检测到外科医生输入装置的横摆运动。外科医生输入装置上的传感器和/或将外科医生输入装置连接到控制台的连杆上的传感器用于检测外科医生输入装置工作区中的外科医生输入装置的横摆运动。
[0091]
如果未检测到外科医生输入装置的横摆运动,则该方法返回到步骤404,其中控制系统确定是否检测到外科医生输入装置的闭合运动。然而,如果在步骤405处检测到外科医生输入装置的横摆运动,则控制回路移动到步骤406。在步骤406处,控制系统命令将共向力施加到末端执行器元件的驱动元件,以便使末端执行器元件根据外科医生输入装置的横摆运动在同一方向上旋转。在图2的实例中,这将向a2和b2施加力以引起末端执行器元件的顺时针横摆,并向a1和b1施加力以引起末端执行器元件的逆时针横摆。为了执行由外科医生输入装置命令的横摆运动,控制系统除了命令末端执行器元件的横摆运动之外,还可以命令铰接联接件203的俯仰关节的铰接和/或机械臂的一个或多个关节的铰接。
[0092]
当在步骤406中施加力时,控制回路移动到步骤404以确定是否检测到外科医生输入装置的闭合运动。在闭合运动上动作比在横摆运动上动作的优先级更高。因此,如果在步骤404处检测到闭合运动,同时根据步骤406向驱动元件施加横摆力,则控制系统移动到步骤402,并且用向驱动元件施加最大力的命令来覆盖横摆末端执行器元件的命令,以便以最大闭合力使末端执行器元件一起闭合。
[0093]
因此,图4的控制回路可以用于更好地调节末端执行器的切割和横摆运动的相互依赖性。切割是优先的,但当外科医生在闭合运动中没有主动地操纵外科医生输入装置时,启用横摆。
[0094]
图5示出了由控制系统实现以调节抓握器械的末端执行器的抓握和横摆运动的相互依赖性的方法。
[0095]
在步骤501处,控制系统检测外科医生的输入装置是否处于抓握构型。对于图3的
外科医生输入装置的实例,如果触发器302相对于主体301的旋转位置在指定范围内,则控制系统检测抓握构型,如上文所描述。如果触发器302相对于主体301的旋转位置超出指定范围,则控制系统未检测到抓握构型。
[0096]
控制系统可以周期性地从手动控制器上的定位传感器接收所感测到的触发器的旋转位置,如上文参考图4所描述。如果所感测到的旋转位置在指定范围内,则控制系统确定外科医生输入装置处于抓握构型。如果所感测到的旋转位置不在指定范围内,则控制系统确定外科医生输入装置不处于抓握构型。
[0097]
如果在步骤501处,控制系统检测到外科医生输入装置不处于抓握构型,则控制系统返回到步骤501。在重复步骤501之前,控制系统可以等待时间间隔t'。
[0098]
如果在步骤501处,控制系统检测到外科医生输入装置处于抓握构型,则其移动到步骤502。在步骤502处,控制系统命令将最大相对力施加到末端执行器元件的驱动元件,以便使末端执行器以最大驱动力闭合。在图2的实例中,这将对a2和b1施加最大驱动力。
[0099]
在步骤502之后,控制系统移动到步骤503,其中其确定是否检测到外科医生输入装置的横摆运动。可以通过外科医生输入装置上的传感器和/或将外科医生输入装置连接到控制台的连杆上的传感器来检测横摆运动,如上文参考图4所描述。虽然控制系统执行步骤503的确定,但根据步骤502,控制系统继续向驱动元件施加最大相对力。
[0100]
如果未检测到外科医生输入装置的横摆运动,则控制系统返回到步骤503。在重复步骤503之前,控制系统可以等待时间间隔t”。
[0101]
如果在步骤503处检测到外科医生输入装置的横摆运动,则控制回路移动到步骤504。在步骤504处,控制系统命令将折减的力施加到使末端执行器元件闭合的驱动元件中的一者,并且命令将最大力继续施加到使末端执行器元件闭合的另一驱动元件。施加到一个驱动元件的折减的力足以使得末端执行器能够如外科医生输入装置所命令的那样横摆。以图2为例,如果外科医生输入装置在顺时针方向上横摆,则折减的力将施加到b1,并且最大力将维持到a2上。这将使得末端执行器201能够在顺时针方向上旋转。如果外科医生输入装置在逆时针方向上横摆,则折减的力将施加到a2,并且最大力将维持到b1上。这将使得末端执行器201能够在逆时针方向上旋转。
[0102]
可以使用单极滤波器来确定最大力折减到折减的力的系数,如上文参考图4所描述。通过折减施加到驱动元件中的一个驱动元件的力,驱动元件能够横摆末端执行器元件,如上文参考图4所描述。
[0103]
因此,图5的控制回路并不将抓握运动的最大化优先于横摆运动。如果在发生抓握运动时外科医生输入装置命令横摆运动,则控制系统将折减抓握运动的力足以使得横摆运动能够被执行。因此,图5的控制回路可以用于更好地调节末端执行器的抓握和横摆运动的相互依赖性。抓握是优先的,但当通过折减抓握力命令时,启用横摆。
[0104]
图6示出了由控制系统实现以调节抓握或切割器械的末端执行器的抓握和横摆运动的相互依赖性的方法。
[0105]
在步骤601处,控制系统检测外科医生的输入装置是否存在闭合运动。这是以与参考图4所描述的相同的方式检测到的。如果在步骤601处,控制系统未检测到外科医生输入装置的闭合运动,则其返回到步骤601。在重复步骤601之前,控制系统可以等待时间间隔t”'。
[0106]
如果在步骤601处,控制系统检测到外科医生输入装置的闭合运动,则其移动到步骤602和603。在步骤602和603处,控制系统确定外科医生输入装置所需的末端执行器横摆力矩是否大于阈值,τ
сар
。具体地说,在步骤602处,控制系统确定针对第一末端执行器元件所需的横摆力矩的大小是否大于τ
сар
。换句话说,对于第一末端执行器所需的横摆力矩的绝对值是否大于τ
сар
或小于
–
τ
сар
。并且在步骤603处,控制系统确定针对第二末端执行器元件所需的横摆力矩的大小是否大于τ
сар
。换句话说,横摆力矩的绝对值大于τ
сар
或小于
–
τ
сар
。
[0107]
第一末端执行器元件的横摆传动力矩τ1是从第一驱动组件接口元件施加到第一器械接口元件的力矩,该力矩驱动第一对驱动元件a1、a2,以使第一末端执行器元件209绕第一横摆轴线208旋转。
[0108]
第二末端执行器元件的横摆传动力矩τ2是从第二驱动组件接口元件施加到第二器械接口元件的力矩,该力矩驱动第二对驱动元件b1、b2,以使第一末端执行器元件210绕第二横摆轴线212旋转。
[0109]
控制系统可以如下实现步骤602和603。
[0110]
在末端执行器τ
yd
处的所要求的横摆力矩可以定义为:
[0111][0112]
在末端执行器τ
sd
处的所要求的扩展力矩可以定义为:
[0113][0114]
上限力矩值定义为:
[0115]
τ
cap
=max(βτ
max
,τ
max
–
|τ
sd
|)(方程6)
[0116]
所施加的横摆力矩τ
у
和扩展力矩τs值定义如下:
[0117]
τy=clamp(τ
yd
,
–
τ
сар
,τ
сар
)(方程7)
[0118]
τs=clamp(τ
sd
,
–
τ
тах
+|τ
у
|,τ
тах
–
|τ
у
|)(方程8)
[0119]
换句话说,τ
у
具有τ
yd
的值,除非τ
yd
《-τ
cap
,在这种情况下其取-τ
сар
的值,或者τ
yd
》τ
cap
,在这种情况下其取τ
сар
的值。τs具有τ
sd
的值,除非τ
sd
《-τ
max
+|τ
у
|,在这种情况下其取-τ
max
+|τy|的值,或τ
sd
》τ
max-|τy|,在这种情况下其取τ
max-|τy|的值。
[0120]
方程7和8的上限不同。扩展力矩τs是优先的。扩展力矩是采用所有可用的最大力矩τ
mах
减去横摆力矩τ
у
。横摆力矩的上限取决于β值。β是由控制系统设定的平衡值。0《β《1。如果β=0,则优先考虑末端执行器元件的打开和闭合。所有可用力矩用于提供末端执行器的打开和闭合运动。如果β=1,则优先考虑末端执行器的横摆运动。可用力矩用于提供末端执行器元件的横摆运动。
[0121]
τ
max
是由控制系统设定的最大力矩值。最大力矩值可以取决于器械类型。最大力矩值可以取决于提供力矩的电机的能力。
[0122]
第一末端执行器元件的所施加的横摆传动力矩τ
1a
由以下给出:
[0123]
τ
1а
=τs–
τy(方程9)
[0124]
第二末端执行器元件的所施加的横摆传动力矩τ
2а
由以下给出:
[0125]
τ
2a
=τs+τy(方程10)
[0126]
如果末端执行器的所要求的扩展力矩和所要求的横摆力矩在方程7和8中所示的阈值之间,则对步骤602和603的问题的回答为否。在这种情况下,所施加的横摆传动力矩τ
1a
与所要求的传动力矩τ1相同,且所施加的横摆传动力矩τ
2a
与所要求的传动力矩τ2相同。在这种情况下,控制系统移动到步骤604和606,其中所要求的传动力矩τ1和τ2被应用为所施加的传动力矩τ
1a
和τ
2a
。
[0127]
如果末端执行器的所要求的扩展力矩和所需横摆力矩大于方程7和8中限定的最大值或小于方程7和8中限定的最小值,则对步骤602和603的问题的答案为是。在这种情况下,所施加的横摆传动力矩τ
1a
被限制为最大(或最小)横摆传动力矩,所施加的横摆传动力矩τ
2a
被限制为由上述方程确定的最大(或最小)横摆传动力矩。在这种情况下,控制系统移动到步骤605和607,其中最大(或最小)传动力矩被施加为所施加的传动力矩τ
1a andτ
2a
。
[0128]
在图6上,步骤604、605、606和607全部在虚线步骤608内。这表示在图6的控制方法的给定迭代中实现的步骤604、605、606和607中的那些步骤是一致进行的。例如,如果对步骤602和603两者的回答为是,则一致地执行步骤605和607。如果对步骤602和603的回答为否,则一致地执行步骤604和606。如果对步骤602的回答为否且对步骤603的回答为是,则一致地执行步骤604和607。如果对步骤602的回答为是,而对步骤603的回答为否,则一致地执行步骤605和606。
[0129]
在步骤608之后,控制系统移动到步骤609。在步骤609处,控制系统确定是否检测到外科医生输入装置的横摆运动。这可以以与参考图4所描述的相同的方式完成。
[0130]
如果未检测到外科医生输入装置的横摆运动,则该方法返回到步骤601,其中控制系统确定是否检测到外科医生输入装置的闭合运动。然而,如果在步骤609处检测到外科医生输入装置的横摆运动,则控制系统移动到步骤610,其中控制系统命令将共向力施加到末端执行器元件的驱动元件,以便使末端执行器元件根据外科医生输入装置的横摆运动在同一方向上旋转,如参考图4所描述。
[0131]
然后,控制系统返回到步骤601,进行控制回路的进一步迭代。
[0132]
因此,图6的控制回路可以用于更好地调节末端执行器的闭合和横摆运动的相互依赖性。在闭合运动期间施加到驱动元件的力矩被限制,以便还使得末端执行器元件能够横摆。
[0133]
在另一实例中,参考图6的步骤602至608所描述的方法可以与图4的方法组合使用。例如,图6的步骤602和608可以用于在图4的步骤402中确定最大力。在这种情况下,当确定施加到驱动元件以使末端执行器元件闭合的最大力时,力矩保留用于使末端执行器元件横摆,如上文参考图6所描述。参考图4的步骤403所描述的力折减值frv在此实例中可以与方程6的平衡值p是相同的。
[0134]
在另一实例中,参考图6的步骤602至608所描述的方法可以与图5的方法组合使用。例如,图6的步骤602和608可以用于在图5的步骤502中确定最大力。在这种情况下,当确定施加到驱动元件以使末端执行器元件闭合的最大力时,力矩保留用于使末端执行器元件横摆,如上文参考图6所描述。仅当该保留的力矩对于步骤503的随后所需的横摆运动不足时,控制系统才折减施加到驱动元件上的力,如参考步骤504所描述。参考图5的步骤504所描述的力折减值frv在此实例中可以与方程6的平衡值β是相同的。
[0135]
末端执行器可以采用任何合适的形式。例如,末端执行器可以是一对弯曲剪刀、电
外科器械(诸如一对单极剪刀)、持针器、一对钳口或有孔抓握器。
[0136]
本文所述的机器人可以用于除外科手术以外的目的。例如,口可以是诸如汽车发动机的制造制品中的检查口,并且机器人可以控制用于查看发动机内部的查看工具。
[0137]
申请人在此独立地公开了本文描述的每个单独的特征以及两个或更多个这种特征的任意组合,只要这些特征或组合能够基于本说明书作为一个整体根据本领域技术人员的公知常识来实施,而不管这些特征或特征的组合是否解决本文公开的任何问题,并且不限制权利要求的范围。申请人指出,本发明的各方面可以由任何这样的单个特征或特征组合组成。鉴于以上描述,对于本领域技术人员来说显而易见的是,可以在本发明的范围内进行各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1