一种用于介入式血管手术的机器人
1.本发明涉及医疗器械领域,尤其涉及一种用于介入式血管手术的机器人。
背景技术:
2.在介入式血管手术中,为了减少医生暴露在x射线中的伤害,同时实现远程医疗,因此需要引入手术机器人。目前投入临床使用的机器人由六自由度机械臂和夹持部分组成,夹持部分同时具有直线输送和周向旋转导丝导管的功能。由于结构相对封闭,消毒清洗较为困难,若进行整体更换则成本过高。并且缺少力反馈装置,医生对患者状况感知度较差。另一方面,机器人所采用的操作方式和传统手术完全不同,医生已有的手术经验难以被活用,存在一定的学习成本。
3.因此,本领域的技术人员致力于开发一种用于介入式血管手术的机器人,结构简单易于拆卸清洁消毒,引入力反馈系统为医生手术提供参考,同时尽量模拟医生手术时的操作,降低学习成本。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是:如何克服现有的介入式血管手术机器人消毒不便、无力反馈、医生操作临场感差及学习成本高的问题。
5.为实现上述目的,本发明提供了一种用于介入式血管手术的机器人,包括机械爪、机械臂、底座;所述机械臂活动设置在所述底座上,所述机械爪活动设置于所述机械臂的末端;还包括操作装置,所述操作装置配置成控制所述机械爪和所述机械臂的运动。
6.进一步地,所述机械爪可拆卸的连接于所述机械臂上。
7.进一步地,所述机械爪包括平行四杆机构和夹持机构,所述平行四杆机构的一端连接于所述机械臂的末端,另一端与所述夹持机构连接。
8.进一步地,所述夹持机构上设有第一扭矩传感器和传送带。
9.进一步地,所述机械臂为由第一臂、第二臂和第三臂构成的六自由度机械臂,所述第一臂的一端连接所述平行四杆机构,另一端连接所述第二臂,所述第三臂的一端与所述第二臂连接,另一端与所述底座连接。
10.进一步地,所述第一臂、第二臂和第三臂之间均为活动连接,且第二臂和第三臂之间设有第二扭矩传感器。
11.进一步地,所述第一臂与所述平行四杆机构之间以及所述第三臂与所述底座之间也设有第二扭矩传感器。
12.进一步地,所述机械臂具有两个,分别连接机械爪连接,以模拟人的双臂。
13.进一步地,所述第一扭矩传感器和所述第二扭矩传感器均与所述操作装置连接。
14.进一步地,所述操作装置可以为手柄、遥控器或者控制面板。
15.与现有技术相比,本发明通过用双机械臂协作进行送管,降低了夹持机构的复杂程度,使快速拆装、更换成为可能,消毒时只需更换末端部分机构。固定机构能对导丝导管
进行固定,使手术时无需额外固定。力反馈系统为医生提供实时反馈,为手术顺利进行提供参考。
16.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
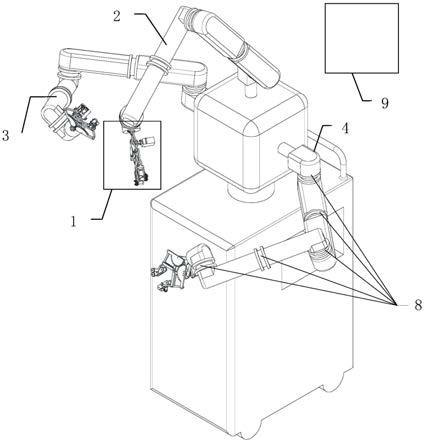
17.图1是本发明的一个较佳实施例的整体示意图;
18.图2是本发明的机械爪的放大示意图;
19.其中,1
‑
机械爪、2
‑
第二臂、3
‑
第一臂、4
‑
第三臂、5
‑
平行四杆机构、6
‑
第一扭矩传感器、7
‑
传送带、8
‑
第二扭矩传感器、9
‑
操作装置。
具体实施方式
20.以下参考说明书附图介绍本发明的优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
21.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
22.如图1所示,本实施例的用于介入式血管手术的机器人,包括机械爪1、机械臂、底座;机械臂活动设置在底座上,机械爪1活动设置于机械臂的末端;还包括操作装置9,操作装置9控制机械爪1和机械臂的运动。机械臂有两个,为六自由度机械臂,包括第一臂3、第二臂2和第三臂4,通过模拟人手臂的运动实现导丝导管直线运动;机械爪1包括平行四杆机构5和夹持机构,平行四杆机构的一端连接于机械臂的末端,另一端与夹持机构连接,夹持机构有两个,位于机械臂末端,通过传送带7相互运动模拟人手的搓捻动作实现导丝导管周向旋转,并有限位装置防止导丝导管滑移,通过平行四杆机构5使传送带能够开合,实现导丝导管的夹持和放开,且机械爪1可以整体从机械臂末端拆卸,利于消毒;还具有一个固定机构,在手术时对导丝导管进行固定;夹持机构上设有第一扭矩传感器6,在多个臂之间,以及臂与平行四杆机构之间,第三臂与底座之间设有第二扭矩传感器8,第一扭矩传感器6和第二扭矩传感器8均与操作装置9连接。操作装置9为手柄、遥控器或者控制面板,实现医生对机器人的实时控制,且医生手柄的使用过程中,会感受到阻力,以表现医生在实际手术过程中,输送导丝导管遇到的阻力。力反馈系统包括力的感知部分和力反馈部分,力感知部分能通过扭矩传感器感知导丝导管受力,力反馈系统能根据力感知系统的信号在控制端提供实时的力反馈。
23.本实施例在使用过程中,机械爪1安装于机械臂上,平行四杆机构5可以实现夹持导管的功能,传送带7可以实现周向旋转导管的功能。当输送导管时,在第二臂2和第一臂3在控制下,完成夹持导管和输送导管的功能;当输送导丝时,第二臂2在控制下保持固定,夹持已送入血管的导管,第一臂3和第三臂4在控制下完成夹持导丝和输送导丝的功能。在整个操作过程中,第一扭矩传感器6实现感知选择导管或导丝时阻力的功能,第二扭矩传感器8实现感知输送导管或导丝时阻力的功能。医生通过操作装置9完成对整个系统的控制,同
时,操作装置9具有根据力感知信号提供力反馈的功能。
24.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
技术特征:
1.一种用于介入式血管手术的机器人,其特征在于,包括机械爪、机械臂、底座;所述机械臂活动设置在所述底座上,所述机械爪活动设置于所述机械臂的末端;还包括操作装置,所述操作装置配置成控制所述机械爪和所述机械臂的运动。2.如权利要求1所述的机器人,其特征在于,所述机械爪可拆卸的连接于所述机械臂上。3.如权利要求2所述的机器人,其特征在于,所述机械爪包括平行四杆机构和夹持机构,所述平行四杆机构的一端连接于所述机械臂的末端,另一端与所述夹持机构连接。4.如权利要求3所述的机器人,其特征在于,所述夹持机构上设有第一扭矩传感器和传送带。5.如权利要求4所述的机器人,其特征在于,所述机械臂为由第一臂、第二臂和第三臂构成的六自由度机械臂,所述第一臂的一端连接所述平行四杆机构,另一端连接所述第二臂,所述第三臂的一端与所述第二臂连接,另一端与所述底座连接。6.如权利要求5所述的机器人,其特征在于,所述第一臂、第二臂和第三臂之间均为活动连接,且第二臂和第三臂之间设有第二扭矩传感器。7.如权利要求6所述的机器人,其特征在于,所述第一臂与所述平行四杆机构之间以及所述第三臂与所述底座之间也设有第二扭矩传感器。8.如权利要求1所述的机器人,其特征在于,所述机械臂具有两个,分别连接机械爪连接,以模拟人的双臂。9.如权利要求7所述的机器人,其特征在于,所述第一扭矩传感器和所述第二扭矩传感器均与所述操作装置连接。10.如权利要求1所述的机器人,其特征在于,所述操作装置可以为手柄、遥控器或者控制面板。
技术总结
本发明公开了一种用于介入式血管手术的机器人,涉及医疗器械技术领域,包括机械爪、机械臂、底座;所述机械臂活动设置在所述底座上,所述机械爪活动设置于所述机械臂的末端;还包括操作装置,所述操作装置配置成控制所述机械爪和所述机械臂的运动。本发明结构简单易于拆卸清洁消毒,引入力反馈系统为医生手术提供参考,同时尽量模拟医生手术时的操作,降低学习成本。成本。成本。
技术研发人员:贺蓉 丁子涵 孙其旸 袁键键 林艳萍
受保护的技术使用者:上海交通大学
技术研发日:2021.06.18
技术公布日:2021/9/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1