一种用于介入式血管手术的机械爪
1.本发明涉及医疗器械领域,尤其涉及一种用于介入式血管手术的机械爪。
背景技术:
2.在介入式血管手术的相关机械设计中,输送部分是及其重要的一环。这部分需要具有直线输送和周向旋转导丝导管的功能。在输送导丝导管的过程中,会出现导丝导管打滑,导丝导管脱离输送机构等问题。现在主流的研究方向是利用摩擦轮机构带动导丝导管直线输送和周向旋转。但由于这种结构相对封闭,消毒清洗较为困难,卫生安全无法得到保障。若进行对整个输送机构更换则成本过高。且这种结构缺少力感知装置,医生对导丝导管进入患者血管内部状况感知度较差。
3.因此,本领域的技术人员致力于开发一种用于介入式血管手术的机械爪,能够夹持导丝导管以及周向旋转导丝导管,结构简单,可拆卸,易于清洁消毒,引入力感知系统为医生手术提供参考。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是:如何克服现有的输送机构消毒不便、无力反馈、医生操作临场感差及学习成本高的问题。
5.为实现上述目的,本发明提供了一种用于介入式血管手术的机械爪,包括机架、夹持机构、传送带机构和控制系统;所述夹持机构设置在所述机架上,所述夹持机构的末端设有所述传送带机构,所述控制系统控制所述夹持机构和传送带机构的运动。
6.进一步地,所述机架通过固定组件与机械臂相连接。
7.进一步地,所述夹持机构包括两个相互啮合的平行四杆机构。
8.进一步地,还具有舵机,所述舵机安装于所述机架上;所述舵机通过与第一联轴器与相连的第一齿轮驱动所述平行四杆机构运动。
9.进一步地,所述传送带机构位于所述平行四杆机构的末端。
10.进一步地,还包括直流电机、支架、第二齿轮、滚轮,所述直流电机安装于与所述平行四杆机构相连的所述支架上,驱动与第二联轴器相连的所述第二齿轮带动所述滚轮旋转,所述滚轮带动所述传送带机构运动。
11.进一步地,所述传送带机构通过方形轴连接所述平行四杆机构;所述方形轴与内衬连接。
12.进一步地,还具有限位机构,所述限位机构与所述平行四杆机构相连接。
13.进一步地,还具有第一扭矩传感器和第二扭矩传感器,所述第一扭矩传感器通过所述第一联轴器与所述舵机相连;所述第二扭矩传感器通过所述第二联轴器与所述直流电机相连。
14.进一步地,所述控制系统与有第一扭矩传感器和第二扭矩传感器,并可控制所述直流电机的输出。
15.与现有技术相比,本发明通过平行四杆机构夹持导丝、导管,通过传送带机构相互运动实现导丝、导管的周向旋转,动力输送装置可为上述机构提供动力。该机械爪结构简单,传送带机构和平行四杆机构可快速拆装和更换,消毒时只需更换末端传送带部分,动力部分也可与传送带机构相分离。同时机械爪的限位部分可以有效防止导丝导管的滑移。力感知系统能检查导丝导管输送过程中遇到的阻力,从而为医生提供实时反馈,为手术顺利进行提供参考。
16.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
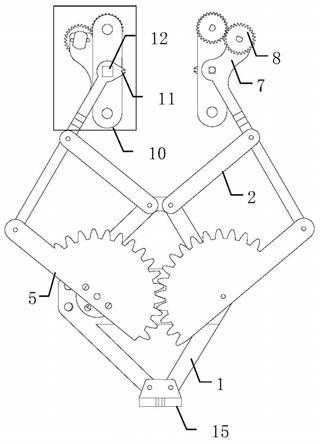
17.图1是本发明的一个较佳实施例的整体示意图;
18.图2是本发明的一个较佳实施例的正视图;
19.图3是本发明的一个较佳实施例的侧视图;
20.其中,1
‑
机架、2
‑
平行四杆机构、3
‑
舵机、4
‑
第二扭矩传感器、5
‑
第一齿轮、6
‑
直流电机、7
‑
支架、8
‑
第二齿轮、9
‑
滚轮、10
‑
传送带机构、11
‑
限位机构、12
‑
方形轴、13
‑
内村、14第一扭矩传感器、15
‑
固定组件、16
‑
第一联轴器、17
‑
第二联轴器。
具体实施方式
21.以下参考说明书附图介绍本发明的优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
22.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
23.如图1
‑
3所示,本实施例的介入式手术机器人输送机构的实现方案,整体外形为机械爪,各部分包括机架1、夹持机构、传送带机构10、动力输送部分、控制系统和力感知系统。
24.夹持机构由两个相互啮合的平行四杆机构2构成,通过该机构实现机械爪的开合动作,完成夹持导丝导管的功能,同时夹持机构上的限位可以防止导丝和导管的滑移。平行四杆机构2固定于机架1,机架1与通过固定组件15与机械臂相连接;舵机3安装于机架1,通过与第一联轴器16与相连的第一齿轮5驱动平行四杆机构2运动,完成机械爪的开合,实现导丝导管的夹持。
25.传送带机构10位于两个平行四杆机构2的末端,传送带可通过实现传送带机构10和平行四杆机构2的拆卸与装配,利于消毒,在平行四杆的带动下,传送带加紧导丝导管,相互运动可模拟人手的搓捻动作实现导丝导管周向旋转。
26.动力输送部分通过开式齿轮传动的方式为传送带和平行四杆的运动提供动力,直流电机6安装于与平行四杆机构2相连的支架7上,驱动与第二联轴器17相连的第二齿轮8带动滚轮9旋转,滚轮9带动传送带机构10运动,实现导丝导管周向旋转的功能。限位11与平行四杆机构2相连接,实现限定导丝导管位置的功能。方形轴12连接平行四杆机构2和内衬13,用于传送带机构和平行四杆机构的拆卸与安装。
27.控制系统可控制直流电机6的输出,读取力反馈系统的信息,通过蓝牙模块与外部的手柄控制器相连接,实现机械爪的控制。第一扭矩传感器14通过第一联轴器16与舵机3相连,用于检测夹持导丝导管的夹持力;第二扭矩传感器4通过第二联轴器17与直流电机6相连,用于检测旋转导丝导管的扭矩大小。力感知系统能感知旋转导丝导管的扭矩大小和和夹持导丝导管的夹持力大小,并提供实时的反馈。
28.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
技术特征:
1.一种用于介入式血管手术的机械爪,其特征在于,包括机架、夹持机构、传送带机构和控制系统;所述夹持机构设置在所述机架上,所述夹持机构的末端设有所述传送带机构,所述控制系统控制所述夹持机构和传送带机构的运动。2.如权利要求1所述的机械爪,其特征在于,所述机架通过固定组件与机械臂相连接。3.如权利要求1所述的机械爪,其特征在于,所述夹持机构包括两个相互啮合的平行四杆机构。4.如权利要求3所述的机械爪,其特征在于,还具有舵机,所述舵机安装于所述机架上;所述舵机通过与第一联轴器与相连的第一齿轮驱动所述平行四杆机构运动。5.如权利要求4所述的机械爪,其特征在于,所述传送带机构位于所述平行四杆机构的末端。6.如权利要求5所述的机械爪,其特征在于,还包括直流电机、支架、第二齿轮、滚轮,所述直流电机安装于与所述平行四杆机构相连的所述支架上,驱动与第二联轴器相连的所述第二齿轮带动所述滚轮旋转,所述滚轮带动所述传送带机构运动。7.如权利要求6所述的机械爪,其特征在于,所述传送带机构通过方形轴连接所述平行四杆机构;所述方形轴与内衬连接。8.如权利要求7所述的机械爪,其特征在于,还具有限位机构,所述限位机构与所述平行四杆机构相连接。9.如权利要求7所述的机械爪,其特征在于,还具有第一扭矩传感器和第二扭矩传感器,所述第一扭矩传感器通过所述第一联轴器与所述舵机相连;所述第二扭矩传感器通过所述第二联轴器与所述直流电机相连。10.如权利要求9所述的机械爪,其特征在于,所述控制系统与有第一扭矩传感器和第二扭矩传感器,并可控制所述直流电机的输出。
技术总结
本发明公开了一种用于介入式血管手术的机械爪,涉及医疗器械技术领域,包括机架、夹持机构、传送带机构和控制系统;所述夹持机构设置在所述机架上,所述夹持机构的末端设有所述传送带机构,所述控制系统控制所述夹持机构和传送带机构的运动。本发明通过平行四杆机构夹持导丝、导管,通过传送带机构相互运动实现导丝、导管的周向旋转,动力输送装置可为上述机构提供动力,结构简单、传送带机构和平行四杆机构可快速拆装和更换,同时机械爪的限位部分可以有效防止导丝导管的滑移。力感知系统能检查导丝导管输送过程中遇到的阻力,从而为医生提供实时反馈,为手术顺利进行提供参考。为手术顺利进行提供参考。为手术顺利进行提供参考。
技术研发人员:贺蓉 丁子涵 孙其旸 袁键键 林艳萍
受保护的技术使用者:上海交通大学
技术研发日:2021.06.18
技术公布日:2021/9/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1