一种齿轮齿条驱动的手握式电动粒子植入装置的制作方法
1.本发明涉及一种齿轮齿条驱动的手握式电动粒子植入装置,属于医疗器械领域。
背景技术:
2.癌症的主要治疗方法之一为放射治疗,而放射治疗可分为近距离放射治疗和外放射治疗两种。其中外放射治疗由于照射面积大,容易对周围正常组织细胞产生影响,而近距离放射粒子植入治疗具有疗效确切、无副作用、创伤小、恢复快等优点,现已在全国范围内应用。现有粒子植入枪只适用于水平方向以及与水平方向成一定夹角植入粒子,而不适用于垂直方向以及与垂直方向成一定夹角植入粒子,因此需要设计一种同时适用于水平方向、垂直方向以及与垂直方向成一定夹角的粒子植入装置。
技术实现要素:
3.本发明的目的是提供一种齿轮齿条驱动的手握式电动粒子植入装置,用来实现水平方向、垂直方向以及与垂直方向成一定夹角的粒子植入,符合人机工程学。
4.本发明的目的是通过以下技术方案实现的:一种齿轮齿条驱动的手握式电动粒子植入装置,其特征在于:主体前端通过螺栓固定安装导轨,所述的导轨前端通过螺栓固定安装前挡板,所述的主体后端安装电池,所述的主体握把上安装外针驱动按钮和内针驱动按钮,所述的主体握把处方形槽内安装调速旋钮,所述的导轨上安装滑块一,所述的滑块一上安装的平板,所述的平板上通过螺栓固定安装驱动电机、内针驱动机构、拨杆机构、弹夹模块,所述的驱动电机与联轴器连接,所述的联轴器另一端与齿轮轴连接,所述的弹夹模块与快速接头螺纹连接,所述的快速接头与穿刺针连接,所述的导轨上安装滑块二,所述的滑块二上安装中间支撑机构,所述的中间支撑机构与所述的穿刺针同轴配合。
5.作为优选,所述的主体握把处符合人体工程学,医生可通过手部不同的握紧姿势,调整不同的进针姿势,实现水平、垂直以及不同角度的进针。
6.本发明的有益效果是:(1)本发明旨在提供一种齿轮齿条驱动的手握式电动粒子植入装置,外针驱动按钮和内针驱动按钮均为三档按钮,通过控制外针驱动按钮与内针驱动按钮即可实现穿刺针以及内针的往复运动,通过调速旋钮可调节穿刺针的运动速度,满足不同工况要求,本发明结构简单、符合人机工程学、操作方便。
附图说明
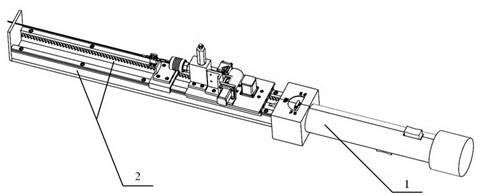
7.图1是本发明齿轮齿条驱动装配图。
8.图2是本发明齿轮齿条驱动爆炸图。
9.附图中的零部件名称及标号如下:主体1、导轨2、前挡板3、电池4、外针驱动按钮5、内针驱动按钮6、调速旋钮7、齿轮
轴8、联轴器9、平板10、驱动电机11、滑块一12、滑块二13、内针驱动机构14、拨杆机构15、弹夹模块16、快速接头17、中间支撑机构18、穿刺针19、主体左101、主体右102。
10.具体实施方式:为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
11.如图1、图2所示,一种齿轮齿条驱动的手握式电动粒子植入装置,其特征在于:主体1前端通过螺栓固定安装导轨2,所述的导轨2前端通过螺栓固定安装前挡板3,所述的主体1后端安装电池4,所述的主体1握把上安装外针驱动按钮5和内针驱动按钮6,所述的主体1握把处方形槽内安装调速旋钮7,所述的导轨2上安装滑块一12,所述的滑块一12上安装的平板10,所述的平板10上通过螺栓固定安装驱动电机11、内针驱动机构14、拨杆机构15、弹夹模块16,所述的驱动电机11与联轴器9连接,所述的联轴器9另一端与齿轮轴8连接,所述的弹夹模块16与快速接头17螺纹连接,所述的快速接头17与穿刺针19连接,所述的导轨2上安装滑块二13,所述的滑块二13上安装中间支撑机构18,所述的中间支撑机构18与所述的穿刺针19同轴配合。
12.如图1所示,一种齿轮齿条驱动的手握式电动粒子植入装置,其特征在于:主体(1)握把处符合人体工程学,医生可通过手部不同的握紧姿势,调整不同的进针姿势,实现水平、垂直以及不同角度的进针。
13.以上所述,仅是本发明基本结构、工作原理及优点,并非对本发明做任何技术限定,在不脱离本发明技术对实施例所作的任何修改、等同变化及修饰,均仍属于本发明技术方案范围内。
技术特征:
1.一种齿轮齿条驱动的手握式电动粒子植入装置,其特征在于:主体(1)前端通过螺栓固定安装导轨(2),所述的导轨(2)前端通过螺栓固定安装前挡板(3),所述的主体(1)后端安装电池(4),所述的主体(1)握把上安装外针驱动按钮(5)和内针驱动按钮(6),所述的主体(1)握把处方形槽内安装调速旋钮(7),所述的导轨(2)上安装滑块一(12),所述的滑块一(12)上安装的平板(10),所述的平板(10)上通过螺栓固定安装驱动电机(11)、内针驱动机构(14)、拨杆机构(15)、弹夹模块(16),所述的驱动电机(11)与联轴器(9)连接,所述的联轴器(9)另一端与齿轮轴(8)连接,所述的弹夹模块(16)与快速接头(17)螺纹连接,所述的快速接头(17)与穿刺针(19)连接,所述的导轨(2)上安装滑块二(13),所述的滑块二(13)上安装中间支撑机构(18),所述的中间支撑机构(18)与所述的穿刺针(19)同轴配合。2.根据权利要求1所述的一种齿轮齿条驱动的手握式电动粒子植入装置,其特征在于:所述的主体(1)握把处符合人体工程学,医生可通过手部不同的握紧姿势,调整不同的进针姿势,实现水平、垂直以及不同角度的进针。
技术总结
一种齿轮齿条驱动的手握式电动粒子植入装置,属于医疗器械领域。主体上安装导轨,导轨上安装滑块一,滑块一上安装平板,平板上安装驱动电机,驱动电机通过联轴器与齿轮轴连接,齿轮轴与齿条配合,主体前端安装前挡板,主体后端安装电池,主体握把上安装外针驱动按钮和内针驱动按钮,外针驱动按钮与内针驱动按钮呈对称布置,且外针驱动按钮位置在内针驱动按钮上方,外针驱动按钮与内针驱动按钮均为三档按钮,控制穿刺针和内针的往复运动,主体握把与导轨中间方型槽内安装调速旋钮,可调节运动速度,滑块二上安装中间支撑结构,对穿刺针起支撑作用,避免穿刺针弯曲。本发明中的装置可实现水平、垂直以及成一定角度的进针,解决了现有装置任意角度进针问题。有装置任意角度进针问题。
技术研发人员:王丽锋 左思浩 张舒 姚鑫 张永德
受保护的技术使用者:佛山市柏康机器人技术有限公司
技术研发日:2021.07.20
技术公布日:2023/1/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1