一种磁性驱动器的制作方法、介入导管机器人
本申请涉及医疗机器人,特别涉及一种磁性驱动器的制作方法、介入导管机器人。
背景技术:
1、机器人技术对医学产生了巨大的影响,从微创手术、靶向治疗、医院优化,到应急响应、假肢和家庭辅助,医疗机器人代表着医疗器械行业中增长最快的行业之一。其中,血管介入微创手术可通过扩张狭窄动脉、改善局部血供等途径有效预防、治疗缺血性血管病。该手术通常由医生在透视设备的辅助下,经血管利用导丝将球囊/支架送至动脉狭窄处,释放并扩张球囊/支架,以达到恢复血管正常生理解剖和局部血供的目的。与开放式手术相比,血管介入微创手术切口小,患者恢复快;不用全身麻醉,手术风险低。因此近几十年来,血管介入微创手术发展迅速,逐渐成为治疗血管疾病的主要临床诊断及治疗方法。
2、然而,当前血管介入微创手术操作方法还存在手术时间长、对医生辐射量较大、缺乏有经验的医生等弊端,目前对导管介入装置的研究基本上还局限于系统的可用性方面,而对于复杂、弯曲且受限的血管系统中,导丝的偏转能力还没有过多的深挖。但在实际应用中,导丝的弯曲性能,往往决定着整个系统的应用瓶颈。
技术实现思路
1、本发明主要解决的技术问题是提供一种磁性驱动器的制作方法、介入导管机器人,能够大幅度提升血管介入微创手术中导丝在复杂、弯曲且受限的血管系统中的偏转能力。
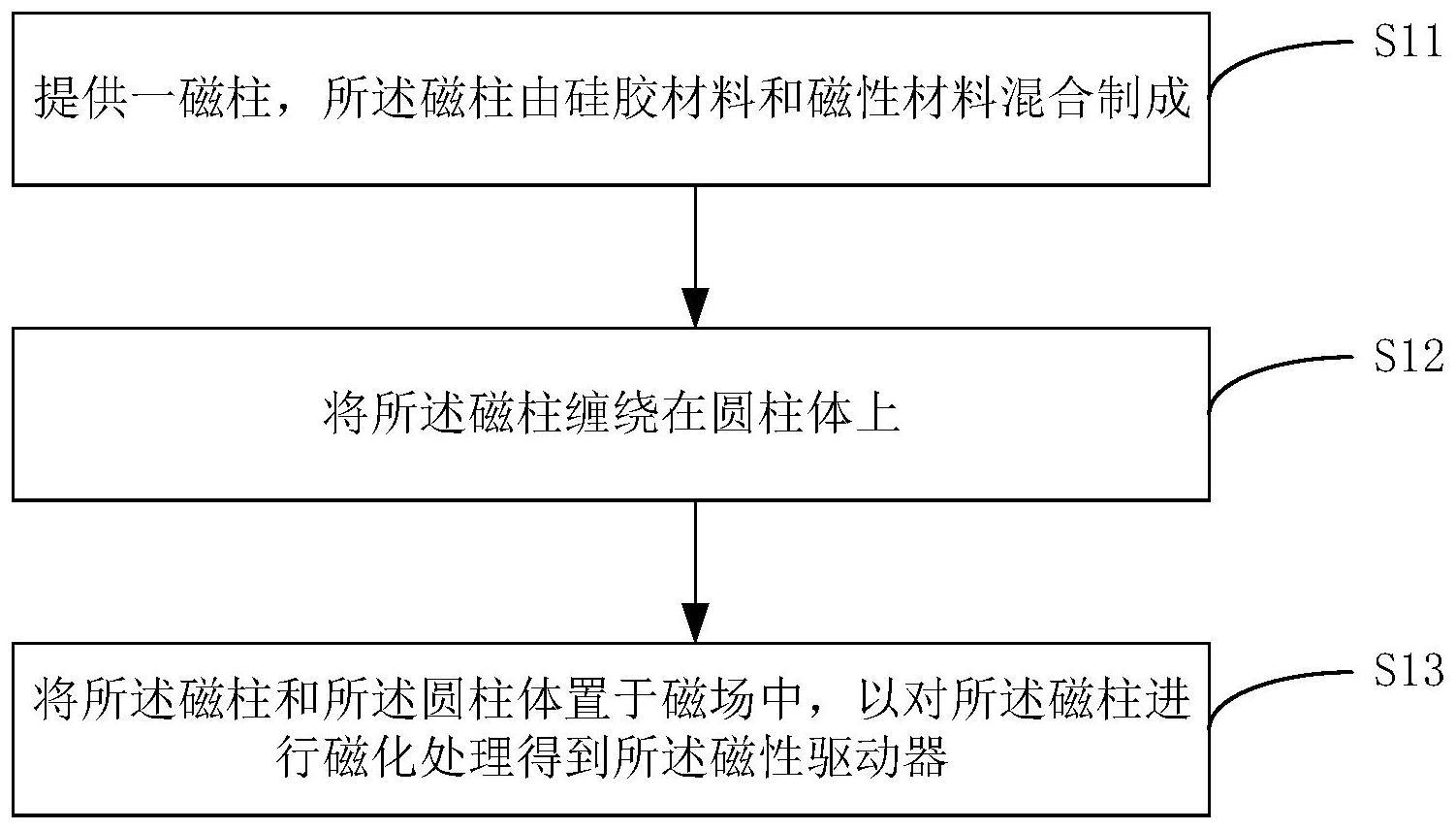
2、为解决上述技术问题,本申请采用的一个技术方案是:提供一种磁性驱动器的制作方法,该方法包括:
3、提供一磁柱,该磁柱由硅胶材料和磁性材料混合制成;将该磁柱缠绕在圆柱体上;将该磁柱和该圆柱体置于磁场中,以对该磁柱进行磁化处理得到磁性驱动器。
4、具体地,上述提供一磁柱的方法包括:将硅胶材料和磁性材料混合得到混合基质;将该混合基质注入圆柱形模具中固化成型;将固化成型的混合基质从圆柱形模具中取出得到磁柱。
5、可选地,硅胶材料为ecoflex。
6、可选地,磁性材料为ndfeb。
7、可选地,硅胶材料和磁性材料混合比例为0.8:1-1.2:1。
8、可选地,磁柱的长度为2-3cm,磁柱的直径为1.7-2.1mm。
9、可选地,磁场为均匀磁场,磁场的磁场强度为600-800mt。
10、具体地,上述将磁柱缠绕在圆柱体上的方法包括:将磁柱首尾相连地缠绕在圆柱体上,且磁柱的缠绕平面与圆柱体的轴向垂直。
11、具体地,在对磁柱进行磁化处理的过程中,磁柱的缠绕平面与磁场的场强方向成一固定的磁化角。具体地,该磁化角为40-50°。
12、为解决上述技术问题,本申请采用的另一个技术方案是:提供一种介入导管机器人,该介入导管机器人包括:
13、导丝;磁性驱动器,磁性驱动器安装在导丝的一端。具体地,磁性驱动器在外部磁场的作用下,驱动导丝在导管中移动。
14、具体地,该介入导管机器人的磁性驱动器是采用上述磁性驱动器的制作方法制作得到的。
15、区别于现有技术,本申请提供了一种磁性驱动器的制作方法、介入导管机器人。该磁性驱动器的制备原材料容易获取,制作流程简单,不需要特殊的设备和工艺,有利于实现大规模生产;该介入导管机器人的磁性驱动器在外部磁场的作用下,能够驱动导丝在导管中移动,使得导丝末端变成磁可控,从而实现大范围的角度偏转,大幅度提升血管介入微创手术中导丝在复杂、弯曲且受限的血管系统中的偏转能力。
技术特征:
1.一种磁性驱动器的制作方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1或2所述的方法,其特征在于,
4.根据权利要求1或2所述的方法,其特征在于,
5.根据权利要求1或2所述的方法,其特征在于,
6.根据权利要求1所述的方法,其特征在于,
7.根据权利要求1所述的方法,其特征在于,
8.根据权利要求7所述的方法,其特征在于,
9.一种介入导管机器人,其特征在于,所述介入导管机器人包括:
10.根据权利要求9所述的介入导管机器人,其特征在于,所述磁性驱动器是采用如权利要求1-8任一项所述的方法制作得到的。
技术总结
本申请涉及医疗机器人技术领域,公开了一种磁性驱动器的制作方法、介入导管机器人。该磁性驱动器的制作方法包括:提供一磁柱,所述磁柱由硅胶材料和磁性材料混合制成;将所述磁柱缠绕在圆柱体上;将所述磁柱和所述圆柱体置于磁场中,以对所述磁柱进行磁化处理得到所述磁性驱动器。将该磁性驱动器安装于导丝末端制成介入导管机器人,使导丝末端变成磁可控,通过磁场可以远程精准地控制介入导管机器人的转向。同时,介入导管机器人能够在外部磁场的作用下实现大范围的角度偏转,大幅度提升了血管介入微创手术中导丝在复杂、弯曲且受限的血管系统中的偏转能力。
技术研发人员:徐天添,张善修,吴新宇,尹猛,赖证宇
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!