路径确定方法、电子装置及计算机可读存储介质与流程
本发明涉及医疗器械领域,尤其涉及一种路径确定方法、电子装置及计算 机可读存储介质。
背景技术:
1、在医疗领域,穿刺是指将穿刺针刺入生物体内的器官抽取分泌物,向体腔 注入气体或药物,从器官中取出活体组织或对器官进行局部消融的一种诊疗技 术。临床上最常用的是二维超声图像引导穿刺,但二维超声只能查看平面影像, 要找到针尖甚至整根针的位置对穿刺操作者的操作和空间想象能力有很高的要 求,尤其是对于心脏等时刻在运动的器官,穿刺难度更高。随着机器人技术的 发展,已有应用于穿刺的机器人(或机械臂)。现有穿刺的机器人大多通过术 前ct和术中x光进行图像配准或采用光学小球定位配准,从而规划穿刺路径。
2、然而,无论是图像配准还是采用光学小球定位配准,均存在误差,尤其是 对于随呼吸或心跳运动的器官,通过配准的方式规划穿刺路径会引起更大的误 差。因此,对于腹腔和胸腔内器官的穿刺,临床上只能凭借医生的经验手动完 成,仍然存在各种不稳定因素导致的操作误差。
技术实现思路
1、本申请实施例提供的路径确定方法、电子装置和计算机可读存储介质,可 以使得穿刺手术精准施行,提升手术的安全性。
2、本申请实施例一方面提供了一种路径确定方法,包括:
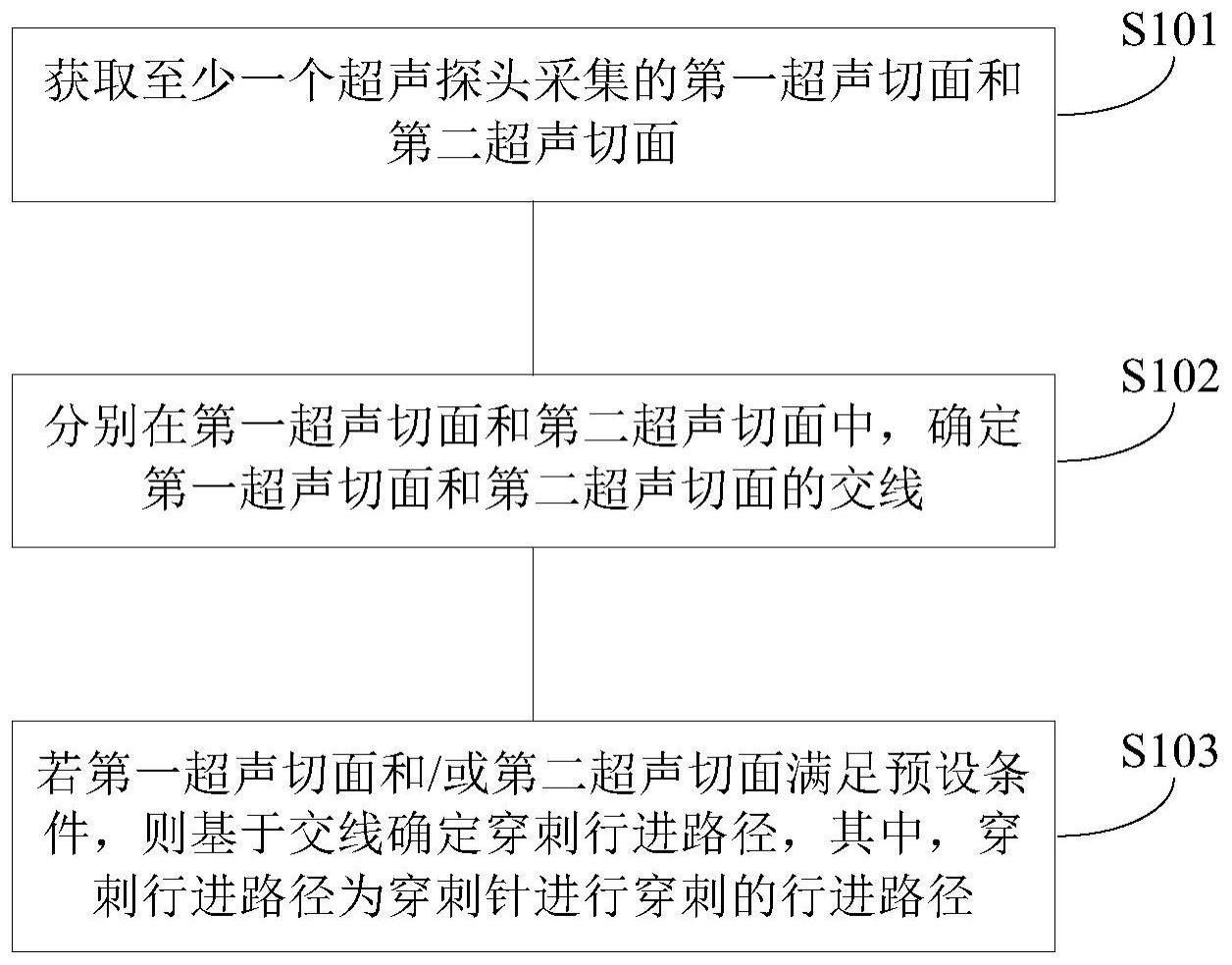
3、获取至少一个超声探头采集的第一超声切面和第二超声切面;
4、分别在第一超声切面和第二超声切面中,确定第一超声切面和第二超声切 面的交线;
5、若所述第一超声切面和/或第二超声切面满足预设条件,则基于所述交线确 定穿刺行进路径,所述穿刺行进路径为穿刺针进行穿刺的行进路径。
6、本申请实施例一方面还提供了一种路径确定装置,包括:
7、获取模块,用于获取至少一个超声探头采集的第一超声切面和第二超声切 面;
8、第一确定模块,用于分别在第一超声切面和第二超声切面中,确定第一超 声切面和第二超声切面的交线;
9、第二确定模块,用于若所述第一超声切面和/或第二超声切面满足预设条件, 则基于所述交线确定穿刺行进路径,所述穿刺行进路径为穿刺针进行穿刺的行 进路径。
10、本申请实施例一方面还提供了一种医疗机器人,包括至少一个探头机械臂、 以及一个穿刺机械臂,其中所述探头机械臂夹持有超声探头,所述穿刺机械臂 夹持有穿刺针,所述医疗机器人还包括控制部件;
11、所述控制部件,配置用于操控所述至少一个探头机械臂夹持的超声探头进 行移动,并获取所述超声探头采集的第一超声切面和第二超声切面;分别在第 一超声切面和第二超声切面中,确定第一超声切面和第二超声切面的交线;若 所述第一超声切面和/或第二超声切面满足预设条件,则基于所述交线确定穿刺 行进路径,并操控所述穿刺机械臂夹持的穿刺针沿所述穿刺行进路径进行穿刺。
12、本申请实施例一方面还提供了一种电子装置,包括:存储器和处理器;
13、所述存储器存储有可执行程序代码;
14、与所述存储器耦合的所述处理器,调用所述存储器中存储的所述可执行程 序代码,执行如上述实施例提供的路径确定方法。
15、本申请实施例一方面还提供一种非暂时性计算机可读存储介质,其上存储 有计算机程序,所述计算机程序在被处理器运行时,实现如上述实施例提供的 路径确定方法。
16、从上述本申请提供的技术方案可知,通过多个超声切面的交线生成穿刺行 进路径,相当于精确定位了穿刺针的空间位置,使得穿刺针沿穿刺行进路径进 行穿刺时能够精确定位目标靶点;同时,将穿刺行进路径同步显示于第一超声 图像和第二超声图像,使得操作者可实时观察整根穿刺针,精准找到针头位置 并能够全程监控进针过程,提高手术的安全性。
技术特征:
1.一种路径确定方法,其特征在于,所述方法包括:
2.如权利要求1所述的路径确定方法,其特征在于,
3.如权利要求1所述的路径确定方法,其特征在于,所述第一超声切面由第一超声探头采集得到,所述第二超声切面由第二超声探头采集得到;其中,所述第一超声探头和第二超声探头为同一超声探头或不同超声探头;
4.如权利要求3所述的路径确定方法,其特征在于,所述确定同一探头坐标系下所述第一超声切面和所述第二超声切面对应的平面方程,包括:
5.如权利要求4所述路径确定方法,其特征在于,所述第一超声探头由第一机械臂夹持,所述第二超声探头由第二机械臂夹持;
6.如权利要求5所述的路径确定方法,其特征在于,所述根据所述机械坐标系至所述探头坐标系的转换矩阵,计算所述第一探头坐标系与第二探头坐标系之间的转换矩阵,包括:将所述第一探头坐标系至所述机械坐标系的转换矩阵的逆矩阵左乘所述第二探头坐标系至所述机械坐标系的转换矩阵,得到所述第一探头坐标系至所述第二探头坐标系的转换矩阵。
7.如权利要求5所述的路径确定方法,其特征在于,所述根据所述第一超声切面的法向量、所述第二超声切面的法向量以及所述第一探头坐标系与第二探头坐标系之间的转换矩阵,求取同一探头坐标系下所述第一超声切面和所述第二超声切面对应的平面方程,包括:
8.如权利要求7所述的路径确定方法,其特征在于,
9.一种路径确定装置,其特征在于,所述装置包括:
10.一种医疗机器人,其特征在于,所述医疗机器人包括至少一个探头机械臂、以及一个穿刺机械臂,其中所述探头机械臂夹持有超声探头,所述穿刺机械臂夹持有穿刺针,所述医疗机器人还包括控制部件;
11.如权利要求10所述的医疗机器人,其特征在于,所述探头机械臂的数量为至少两个,所述探头机械臂包括第一机械臂和第二机械臂,所述第一机械臂夹持有第一超声探头,所述第二机械臂夹持有第二超声探头,所述第一超声探头用于采集所述第一超声切面,所述第二超声探头用于采集所述第二超声切面。
12.如权利要求11所述的医疗机器人,其特征在于,所述医疗机器人还包括第一运动平台、第二运动平台、第三运动平台、与所述第一运动平台连接的第一旋转电机、与所述第二运动平台连接的第二旋转电机、以及与所述第三运动平台连接的第三旋转电机;
13.如权利要求10所述的医疗机器人,其特征在于,所述探头机械臂的数量为至少一个,所述探头机械臂包括第一机械臂,所述第一机械臂夹持有第一超声探头,所述第一超声探头用于采集第一超声切面和第二超声切面。
14.如权利要求13所述的医疗机器人,其特征在于,所述医疗机器人还包括第一运动平台、第三运动平台、与所述第一运动平台连接的第一旋转电机、以及与所述第三运动平台连接的第三旋转电机;
15.一种电子装置,其特征在于,所述电子装置包括:存储器和处理器;
16.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1至8中的任一项所述的路径确定方法。
技术总结
本申请涉及医疗器械领域,提供了路径确定方法、电子装置及计算机可读存储介质,可以使得穿刺手术精准施行,提升手术的安全性。所述方法包括:获取至少一个超声探头采集的第一超声切面和第二超声切面;分别在第一超声切面和第二超声切面中,确定第一超声切面和第二超声切面的交线;若第一超声切面和/或第二超声切面满足预设条件,则基于交线确定穿刺行进路径,其中,穿刺行进路径为穿刺针进行穿刺的行进路径。本申请提供的技术方案相比于人手操作非常稳定可靠,使得穿刺针沿穿刺行进路径进行穿刺时能够精确定位目标靶点,可精准找到针头位置并能够全程监控进针过程,提高手术的安全性。
技术研发人员:黄善灯,潘鲁锋,张秀坤,柳建飞
受保护的技术使用者:诺创智能医疗科技(杭州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!