手术机器人的制作方法
本申请涉及医疗器械领域,特别是涉及一种手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
2、随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主控制台及从操作设备,主控制台用于根据医生的操作向从操作设备发送控制命令,以控制从操作设备,从操作设备用于响应主控制台发送的控制命令,并执行相应的手术操作。器械与从操作设备的驱动装置连接,用于执行外科手术,器械的远端包括用于执行手术操作的末端装置和与末端装置连接的可以多个自由度动作的关节组件。
3、多个器械的关节组件和末端装置穿过套管延伸至远处,在通过使套管沿远程运动中心以调整一个器械的末端的位置时,可能会存在安全性问题,对此现有技术没有较好的解决方案。
技术实现思路
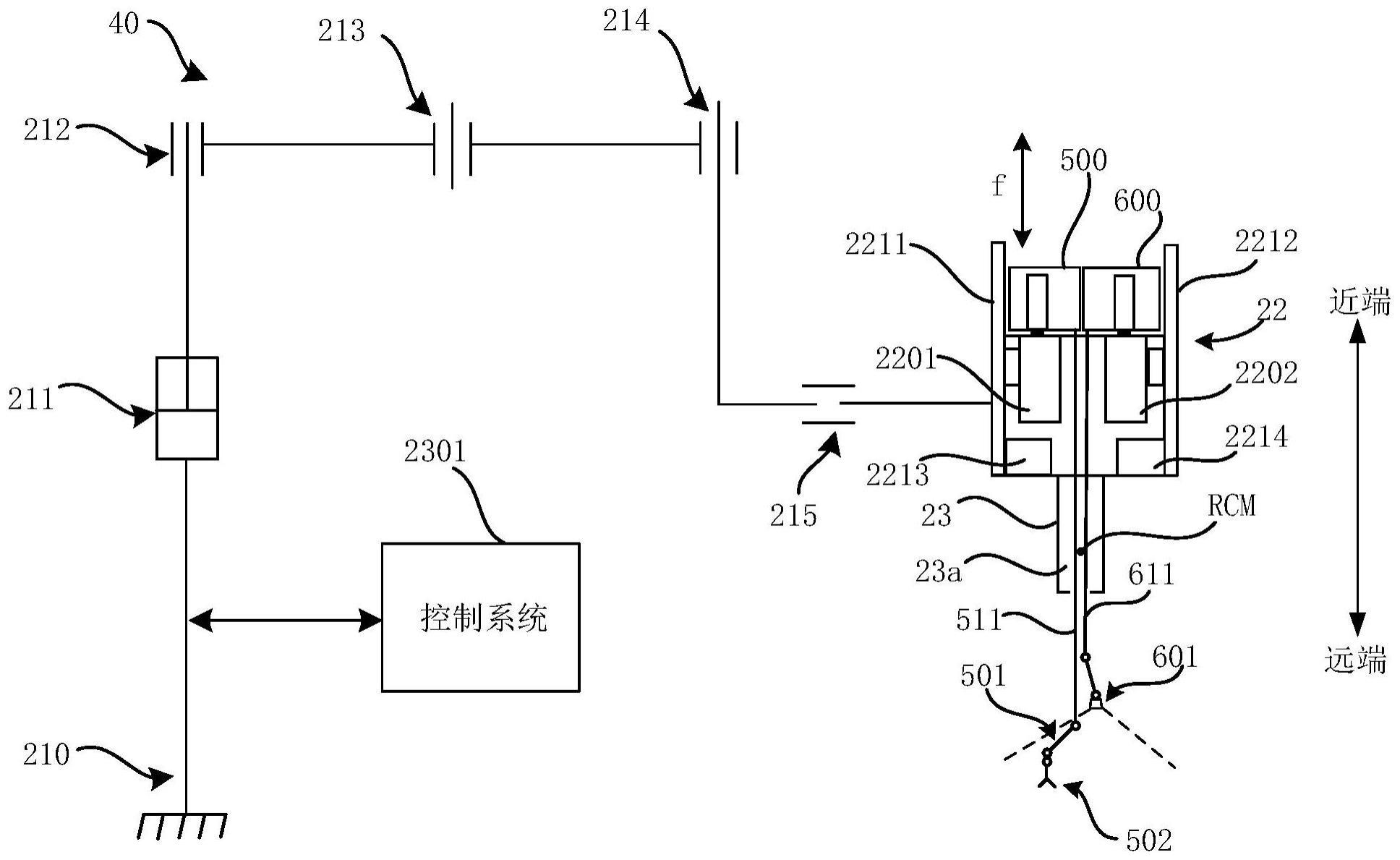
1、基于此,为解决上述问题,在第一方面,本申请提供了一种手术机器人,所述手术机器人包括:
2、机械臂,所述机械臂包括多个接头;
3、器械,其包括长轴、关节组件及末端装置,所述关节组件连接在所述长轴和末端装置之间;
4、套管,所述套管包括通道,所述关节组件和所述末端装置穿过所述通道;
5、第一驱动装置,其耦合到所述器械,并用于驱动所述关节组件运动;
6、控制系统,其与所述多个接头耦合,所述控制系统用于通过控制所述多个接头联动以使套管沿远程运动中心转动;
7、在所述套管沿所述远程运动中心转动时,所述控制系统发送第一控制命令给所述第一驱动装置,响应于所述第一控制命令,所述第一驱动装置驱动所述关节组件运动以保持所述末端装置的位置和/或姿态不变。
8、在一个具体的实施例中,所述关节组件包括平行关节,所述平行关节运动使所述末端装置横移或纵移;在所述套管沿所述远程运动中心转动时,响应于所述第一控制命令,所述第一驱动装置驱动所述平行关节运动以保持所述末端装置的位置和/或姿态不变。
9、在一个具体的实施例中,所述关节组件还包括腕关节,所述腕关节连接在所述平行关节和所述末端装置之间,所述腕关节运动使所述末端装置俯仰或偏摆;在所述套管沿所述远程运动中心转动时,响应于所述第一控制信号,所述第一驱动装置驱动所述腕关节运动以保持所述末端装置的位置和/或姿态不变。
10、在一个具体的实施例中,在所述套管沿所述远程运动中心转动时,响应于所述第一控制信号,所述第一驱动装置驱动所述末端装置沿其轴旋转以保持所述末端装置的位置和/或姿态不变。
11、在一个具体的实施例中,所述手术机器人还包括第二驱动装置,在所述套管沿所述远程运动中心转动时,所述控制系统发送第二控制命令给所述第二驱动装置,响应于所述第二控制命令,所述第二驱动单元驱动所述长轴沿所述通道的轴向直线运动以保持所述末端装置的位置和/或姿态不变。
12、在一个具体的实施例中,所述平行关节包括:
13、近端关节,所述近端关节的近端与所述长轴的远端连接
14、中间段,所述近端关节的远端与所述中间段的近端相连接;
15、远端关节,所述远端关节连接于所述末端装置和所述中间段之间;
16、第一缆绳对,所述第一缆绳对的一端连接于所述近端关节或所述长轴,另一端连接于所述远端关节;
17、第二缆绳对,其至少包括第一驱动缆绳,所述第一驱动缆绳致动所述远端关节,所述远端关节通过第一缆绳对致动近端关节。
18、在一个具体的实施例中,所述第二对缆绳还包括第二驱动缆绳,所述第一驱动缆绳和所述第二驱动缆绳在所述中间段中交叉。
19、在一个具体的实施例中,所述第一驱动缆绳和所述第二驱动缆绳的远端连接在所述远端关节或所述近端关节上。
20、在第二方面,本申请提供了一种手术机器人,所述手术机器人包括:
21、机械臂,所述机械臂包括多个接头;
22、第一器械,其包括长轴、平行关节及末端装置,所述平行关节连接在所述长轴和末端装置之间;
23、第二器械,所述第二器械用于获取环境特征;
24、所述第一器械和所述第二器械与所述机械臂相连,所述多个接头联动用于使所述第一器械和所述第二器械沿远程运动中心转动;
25、第一驱动装置,其耦合到所述第一器械,并用于驱动所述平行关节运动;
26、控制系统,其用于发送第一控制命令给所述第一驱动装置,在所述第二器械沿远程运动中心转动时,响应于所述第一控制命令,所述第一驱动装置驱动所述平行关节运动以保持所述末端装置的位置和/或姿态不变。
27、在一个具体的实施例中,所述手术机器人还包括第二驱动装置,所述控制系统发送第二控制命令给所述第二驱动装置;在所述第二器械沿所述远程运动中心转动时,响应于所述第二控制命令,所述第二驱动单元驱动所述长轴沿其轴向直线运动以保持所述末端装置的位置和/或姿态不变。
28、在一个具体的实施例中,所述第二器械还包括平行关节和相机,所述平行关节运动以使所述相机横移或纵移。
29、在套管沿远程运动中心转动时,本申请的关节组件可以同时运动,从而使末端装置的位姿维持不变,从而提高手术的安全性。
技术特征:
1.一种手术机器人,其特征在于,所述手术机器人包括:
2.如权利要求1所述的手术机器人,其特征在于,所述关节组件包括平行关节,所述平行关节运动使所述末端装置横移或纵移;在所述套管沿所述远程运动中心转动时,响应于所述第一控制命令,所述第一驱动装置驱动所述平行关节运动以保持所述末端装置的位置和/或姿态不变。
3.如权利要求2所述的手术机器人,其特征在于,所述关节组件还包括腕关节,所述腕关节连接在所述平行关节和所述末端装置之间,所述腕关节运动使所述末端装置俯仰或偏摆;在所述套管沿所述远程运动中心转动时,响应于所述第一控制信号,所述第一驱动装置驱动所述腕关节运动以保持所述末端装置的位置和/或姿态不变。
4.如权利要求3所述的手术机器人,其特征在于,在所述套管沿所述远程运动中心转动时,响应于所述第一控制信号,所述第一驱动装置驱动所述末端装置沿其轴旋转以保持所述末端装置的位置和/或姿态不变。
5.如权利要求2-4任一项所述的手术机器人,其特征在于,所述手术机器人还包括第二驱动装置,在所述套管沿所述远程运动中心转动时,所述控制系统发送第二控制命令给所述第二驱动装置,响应于所述第二控制命令,所述第二驱动单元驱动所述长轴沿所述通道的轴向直线运动以保持所述末端装置的位置和/或姿态不变。
6.如权利要求2所述的手术机器人,其特征在于,所述平行关节包括:
7.如权利要求6所述的手术机器人,其特征在于,所述第二对缆绳还包括第二驱动缆绳,所述第一驱动缆绳和所述第二驱动缆绳在所述中间段中交叉。
8.如权利要求7所述的手术机器人,其特征在于,所述第一驱动缆绳和所述第二驱动缆绳的远端连接在所述远端关节或所述近端关节上。
9.一种手术机器人,其特征在于,所述手术机器人包括:
10.如权利要求9所述的手术机器人,其特征在于,所述手术机器人还包括第二驱动装置,所述控制系统发送第二控制命令给所述第二驱动装置;在所述第二器械沿所述远程运动中心转动时,响应于所述第二控制命令,所述第二驱动单元驱动所述长轴沿其轴向直线运动以保持所述末端装置的位置和/或姿态不变。
11.如权利要求9所述的手术机器人,其特征在于,所述第二器械还包括平行关节和相机,所述平行关节运动以使所述相机横移或纵移。
技术总结
本申请实施例提供一种手术机器人,该手术机器人包括具有多个接头的机械臂;器械,其被机械臂所述驱动;套管,多个接头联动可使套管沿远程运动中心转动;驱动装置,其耦合到所述器械,并用于驱动器械的关节组件运动;控制系统,其耦合到驱动装置,在套管沿远程运动中心转动,响应于所述第一控制命令,所述第一驱动装置驱动所述关节组件运动以保持所述末端装置的位置和/或姿态不变。
技术研发人员:王建辰,李鹏志,陈忠庆
受保护的技术使用者:深圳市精锋医疗科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!