一种角度可调的与机器人对接的超声磨钻夹具的制作方法
1.本实用新型涉及医疗器械技术领域,尤其是一种角度可调的与机器人对接的超声磨钻夹具。
背景技术:
2.脊柱外科手术需要对患者脊柱部位进行大量的磨削操作,但由于毗邻神经血管,磨削操作风险很大。随着机器人智能技术在手术中的应用,磨削操作的精度得到了很大提高,但是,高速磨钻对软组织仍然存在卷刮的风险,机械臂辅助高速磨钻磨削造成神经血管损伤的风险仍然较大。随着超声磨钻在脊柱手术的普及,由于其具有软组织识别的能力,不卷刮、产热少,神经血管损伤的风险大大降低。可是,由于没有和机器人机械臂适配的超声磨钻夹具,使得机器人和超声磨钻这两个对手术精度和安全性都极为重要的工具无法有效地联合使用,机器人辅助超声磨钻在磨削应用时受到限制。现有技术中,高速磨钻夹具同机器人机械臂的连接都是固定角度连接,而手术中由于手术切口显露的范围有限,机器臂和磨钻的角度不能调节,在患者脊柱某些较深的部位,磨钻刀头无法到达,不能顺利完成磨削操作。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种角度可调的与机器人对接的超声磨钻夹具,具有结构简单、使用方便、与超声磨钻装配快捷方便、可改变机器人和超声磨钻之间的连接角度,具有提高医护操作效率的特点。
4.为解决上述技术问题,本实用新型所采用的技术方案是:一种角度可调的与机器人对接的超声磨钻夹具,包括内部装夹超声磨钻的主体套筒、旋紧外套和对接轴;所述主体套筒上部设有多个爪片,所述旋紧外套通过螺纹与主体套筒上部连接并锁紧爪片固定超声磨钻,所述对接轴右端连接机器人,对接轴左端与主体套筒中部活动连接。
5.上述的一种角度可调的与机器人对接的超声磨钻夹具,还包括旋紧手柄,所述旋紧外套的外周面上设有旋紧手柄。
6.上述的一种角度可调的与机器人对接的超声磨钻夹具,还包括摇臂、固定臂、螺栓和螺母,所述对接轴的左端设有摇臂,所述主体套筒中部设有固定臂,所述摇臂通过螺栓和螺母与固定臂连接。
7.上述的一种角度可调的与机器人对接的超声磨钻夹具,还包括插板,所述固定臂上设有插板,所述摇臂设有适配的插槽,所述插板进入插槽内并通过螺栓和螺母连接。
8.上述的一种角度可调的与机器人对接的超声磨钻夹具,还包括弹簧垫圈,在所述螺母与摇臂之间安装弹簧垫圈。
9.上述的一种角度可调的与机器人对接的超声磨钻夹具,所述摇臂上设有角度变化的指示箭头,所述插板上设有相对应的角度刻度线。
10.本实用新型提供的一种角度可调的与机器人对接的超声磨钻夹具,设置了包括内
部装夹超声磨钻的主体套筒、旋紧外套和对接轴;所述主体套筒上部设有多个爪片,所述旋紧外套通过螺纹与主体套筒上部连接并锁紧爪片固定超声磨钻,所述对接轴右端连接机器人,对接轴左端与主体套筒中部活动连接。其有益技术效果是:一,可以通过螺栓调整固定臂和摇臂之间的角度,改变对接轴和超声磨钻之间的连接角度,进一步改变机器人和超声磨钻之间的连接角度,实现患者特殊部位的磨削操作。二,旋紧外套通过螺纹连接压紧内部的爪片,快速将超声磨钻压紧。三,本实用新型的对接轴与机器人之间可以快速对接,做好术前准备工作,实现机器人控制超声磨钻进行手术。本实用新型结构简单、使用方便、与超声磨钻装配快捷方便、具有提高医护操作效率的特点。
附图说明
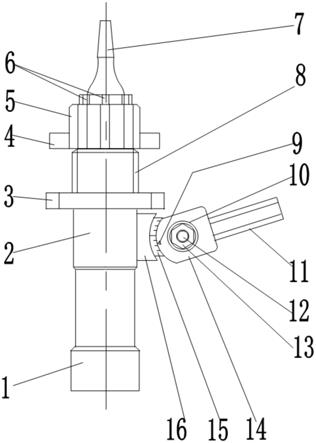
11.图1为本实用新型的结构示意图;
12.图2为图1的仰视图:
13.图3为本实用新型的使用结构示意图;
14.图4为原有技术中的超声磨钻夹具结构示意图。
15.图中各部件标号为:超声磨钻1、主体套筒2、把手3、旋紧手柄4、旋紧外套5、爪片6、磨头7、外螺纹8、指示箭头9、弹簧垫圈10、对接轴11、螺栓12、螺母13、摇臂14、角度刻度线15、固定臂16、插板17、翅板18。
具体实施方式
16.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.如图1~4所示,本实用新型提供的一种角度可调的与机器人对接的超声磨钻夹具,术前操作使用方法如下:首先是将超声磨钻1放入主体套筒2内,用旋紧外套5通过螺纹连接主体套筒2并压紧内部的爪片6,将超声磨钻1装配牢固。其次是松开螺母13,根据指示箭头9和角度刻度线15调节固定臂16和摇臂14之间的角度,安装好弹簧垫圈10并用扳手紧固螺栓12和螺母13。再次是将对接轴11右端插入机器人专设的连接孔内,对接轴11的周面为外六角,与机器人可以保持稳定快速连接。
18.据上述说明书的揭示和教导,本实用新型所属领域的技术人员还可以对上述实施方式进行适当的变更和修改。因此,本实用新型并不局限于上面揭示和描述的具体实施方式,对本实用新型的一些修改和变更也应当落入本实用新型的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
技术特征:
1.一种角度可调的与机器人对接的超声磨钻夹具,其特征在于:包括内部装夹超声磨钻(1)的主体套筒(2)、旋紧外套(5)和对接轴(11);所述主体套筒(2)上部设有多个爪片(6),所述旋紧外套(5)通过螺纹与主体套筒(2)上部连接并锁紧爪片(6)固定超声磨钻(1),所述对接轴(11)右端连接机器人,对接轴(11)左端与主体套筒(2)中部活动连接。2.根据权利要求1所述的一种角度可调的与机器人对接的超声磨钻夹具,其特征在于:还包括旋紧手柄(4),所述旋紧外套(5)的外周面上设有旋紧手柄(4)。3.根据权利要求2所述的一种角度可调的与机器人对接的超声磨钻夹具,其特征在于:还包括摇臂(14)、固定臂(16)、螺栓(12)和螺母(13),所述对接轴(11)的左端设有摇臂(14),所述主体套筒(2)中部设有固定臂(16),所述摇臂(14)通过螺栓(12)和螺母(13)与固定臂(16)连接。4.根据权利要求3所述的一种角度可调的与机器人对接的超声磨钻夹具,其特征在于:还包括插板(17),所述固定臂(16)上设有插板(17),所述摇臂(14)设有适配的插槽,所述插板(17)进入插槽内并通过螺栓(12)和螺母(13)连接。5.根据权利要求4所述的一种角度可调的与机器人对接的超声磨钻夹具,其特征在于:还包括弹簧垫圈(10),在所述螺母(13)与摇臂(14)之间安装弹簧垫圈(10)。6.根据权利要求5所述的一种角度可调的与机器人对接的超声磨钻夹具,其特征在于:所述摇臂(14)上设有角度变化的指示箭头(9),所述插板(17)上设有相对应的角度刻度线(15)。
技术总结
本实用新型公开了一种角度可调的与机器人对接的超声磨钻夹具,设置了包括内部装夹超声磨钻的主体套筒、旋紧外套和对接轴;所述主体套筒上部设有多个爪片,所述旋紧外套通过螺纹与主体套筒上部连接并锁紧爪片固定超声磨钻,所述对接轴右端连接机器人,左端与主体套筒中部活动连接。本实用新型结构简单、使用方便、与超声磨钻装配快捷方便、通过螺栓调整固定臂和摇臂之间的角度,改变对接轴和超声磨钻之间的连接角度,实现患者特殊部位的磨削操作,具有提高医护操作效率的特点。具有提高医护操作效率的特点。具有提高医护操作效率的特点。
技术研发人员:郎昭 朱志斌 唐强 田伟
受保护的技术使用者:北京积水潭医院
技术研发日:2021.07.20
技术公布日:2021/12/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1