控制装置、内窥镜系统以及控制方法与流程
本发明涉及控制装置、内窥镜系统以及控制方法,特别涉及进行使内窥镜追随处置器具的控制的控制装置、内窥镜系统以及控制方法。本申请主张在2020年9月10日在美国临时申请的美国专利临时申请第63/076,408号的优先权,并在此引用其内容。
背景技术:
1、在腹腔镜手术中,手术者一边观察显示在监视器的画面上的内窥镜图像内的处置器具,一边操作处置器具。在处置器具位于内窥镜图像的端部或从内窥镜图像脱离的情况下,手术者的压力增大或难以继续手术,因此,使处置器具持续位于内窥镜图像的中心附近是重要的。因此,提出了通过使内窥镜追随处置器具而将处置器具持续配置在内窥镜图像内的中心附近的装置(例如,参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开平5-337118号公报
技术实现思路
1、发明所要解决的课题
2、手术者为了进行处置而想要捕捉到内窥镜图像的中心的区域与处置器具的关系根据处置的内容而不同。因此,如专利文献1那样,在使内窥镜追随处置器具以将处置器具配置在相对于内窥镜固定的位置的情况下,无法在内窥镜图像的中心持续捕捉手术者想要观察的区域。
3、例如,如图22a所示,在从左下向右上剥离生物体组织的情况下,尽管手术者想要观察电手术刀6的行进方向的前方的区域c,但区域c配置在内窥镜图像b的右上端或外部。如图22b所示,在使用2个钳子6展开生物体组织的情况下,尽管手术者想要观察2个钳子6间的区域c,但区域c配置在内窥镜图像b的左端或外部。
4、本发明是鉴于上述情况而完成的,其目的在于提供能够根据处置场景将处置器具配置在内窥镜图像内的适当的位置的控制装置、内窥镜系统以及控制方法。
5、用于解决课题的手段
6、本发明的一个方式是控制内窥镜的移动而使所述内窥镜追随处置器具的控制装置,该控制装置具有处理器,该处理器取得包含所述处置器具的位置的位置信息,该处理器取得场景信息,该场景信息是与由所述内窥镜观察的处置场景关联的信息,该处理器根据所述场景信息决定目标点的偏移参数,该偏移参数是决定所述目标点相对于所述内窥镜的视野内规定的基准点的位置的参数,该处理器根据该偏移参数设定所述目标点相对于所述基准点的位置,该处理器根据所述目标点的位置和所述处置器具的所述位置控制所述内窥镜的移动,由此使所述内窥镜追随所述处置器具,以将所述处置器具配置于所述目标点。
7、本发明的另一方式是一种内窥镜系统,其具有:内窥镜;移动装置,其使该内窥镜在被检体内移动;以及上述的控制装置,其控制该移动装置,使所述内窥镜追随处置器具。
8、本发明的另一方式是控制内窥镜的移动而使所述内窥镜追随处置器具的控制方法,该控制方法包含以下步骤:取得包含所述处置器具的位置的位置信息;取得场景信息,该场景信息是与由所述内窥镜观察的处置场景相关联的信息;根据该场景信息来决定目标点的偏移参数,该偏移参数是决定所述目标点相对于所述内窥镜的视野内规定的基准点的位置的参数;根据该偏移参数来设定所述目标点相对于所述基准点的位置;以及根据所述目标点的位置和所述处置器具的所述位置来控制所述内窥镜的移动,由此使所述内窥镜追随所述处置器具,以将所述处置器具配置于所述目标点。
9、发明效果
10、根据本发明,起到能够根据处置场景将处置器具配置在内窥镜图像内的适当的位置这样的效果。
技术特征:
1.一种控制装置,其控制内窥镜的移动而使该内窥镜追随处置器具,其中,
2.根据权利要求1所述的控制装置,其中,
3.根据权利要求2所述的控制装置,其中,
4.根据权利要求1所述的控制装置,其中,
5.根据权利要求4所述的控制装置,其中,
6.根据权利要求5所述的控制装置,其中,
7.根据权利要求5所述的控制装置,其中,
8.根据权利要求4所述的控制装置,其中,
9.根据权利要求4所述的控制装置,其中,
10.根据权利要求1所述的控制装置,其中,
11.一种控制装置,其控制内窥镜的移动而使所述内窥镜追随处置器具,其中,
12.一种内窥镜系统,其中,
13.根据权利要求12所述的内窥镜系统,其中,
14.根据权利要求12所述的内窥镜系统,其中,
15.根据权利要求14所述的内窥镜系统,其中,
16.一种控制方法,其对内窥镜的移动进行控制而使该内窥镜追随处置器具,其中,该控制方法包含以下步骤:
技术总结
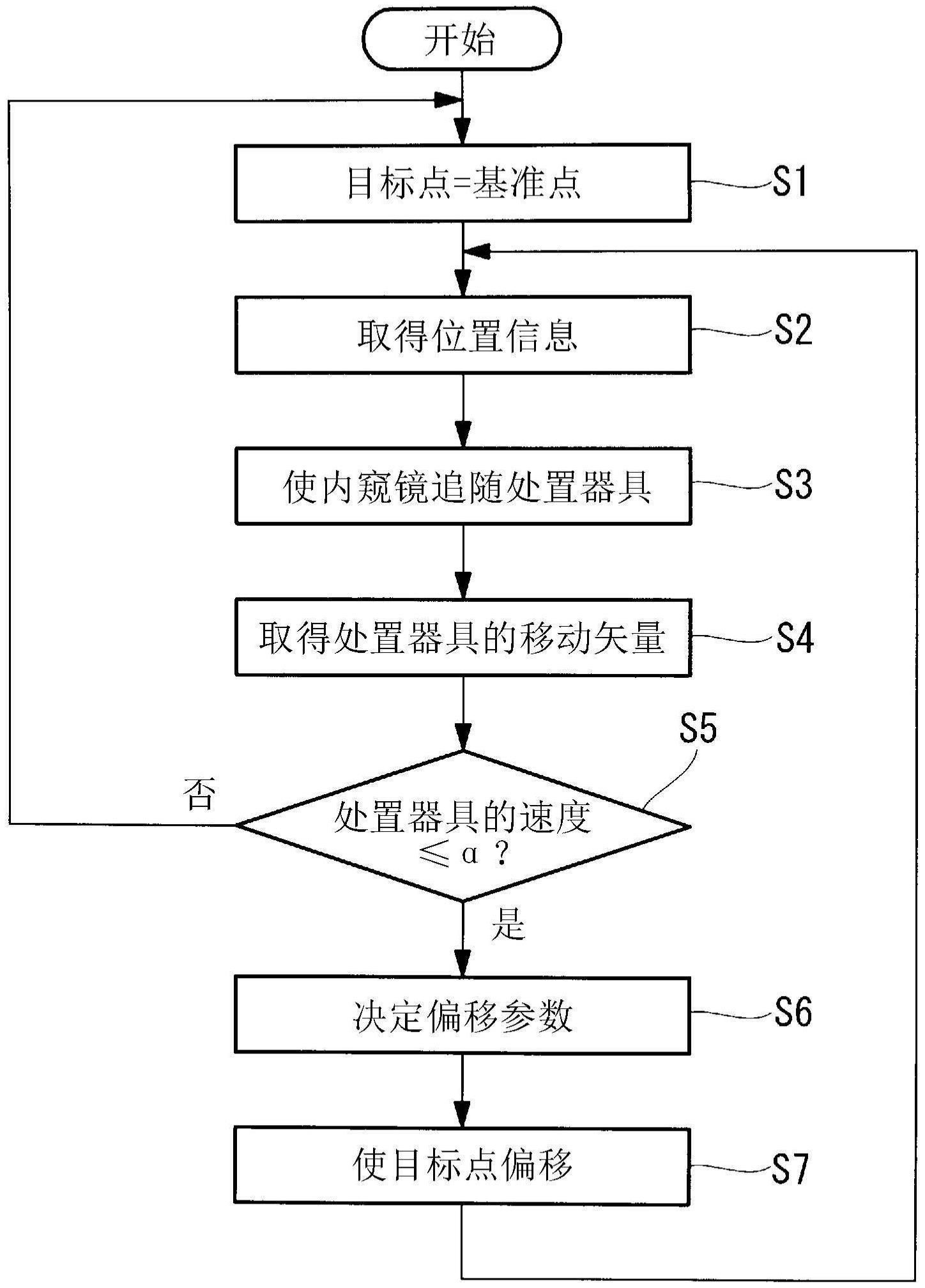
控制装置控制内窥镜的移动而使内窥镜追随处置器具。控制装置具备处理器。处理器取得包含处置器具的位置的位置信息(S2),取得与由内窥镜观察的处置场景关联的信息即场景信息(S4),根据场景信息决定目标点的偏移参数(S6),偏移参数是决定目标点相对于内窥镜的视野内规定的基准点的位置的参数,根据偏移参数设定目标点相对于基准点的位置(S7),根据目标点的位置和处置器具的位置控制内窥镜的移动,由此使内窥镜追随处置器具,以将处置器具配置于目标点(S3)。
技术研发人员:荻本浩人,佐佐井亮太,柳原胜,长谷川宽,北口大地,竹下修由,小岛成浩,古泽悠贵,杵渊裕美,伊藤雅昭
受保护的技术使用者:奥林巴斯株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!