机器人手术站
本发明总体上涉及手术机器人,尤其涉及一种机器人手术站。
背景技术:
1、目前,手术室的组织形式主要基于19世纪的前机器人环境。随着手术机器人的引入,尤其是在腹腔镜介入的框架内,出现了手术和手术室配置的新时代。
2、已知的用于微创手术的机器人,例如“达芬奇”设有多个机械臂和末端执行器,手术工具与末端执行器连接。在典型的布置中,机器人被放置在手术台的旁边,并且由外科医生远程控制,例如通过允许选择性地驱动机械臂和工具的特殊手柄和踏板,从而对患者进行手术介入。
3、wo2014/201340a1公开了一种集成的手术站,该手术站主要包括固定到地面的基座和围绕滚动轴线和俯仰轴线可旋转的环形结构。患者的病床和多个机械臂安装在该环形结构上并且可一体地移动到该环形结构上。
4、尽管上述机器人系统和集成机器人站是可用的,但是仍然需要改进的安全性、多功能性和操作结构的机动性,并且需要在不影响手术介入的可靠性和质量的情况下减小它们的尺寸和复杂性。
技术实现思路
1、根据本发明的原理构造的手术机器人站满足了上述需求。
2、优选的特征是从属权利要求中阐述的示例的对象。
3、本发明涉及一种机器人手术站,该机器人手术站主要包括待搁置在地面上的基座和弓形结构,例如合适的部分环形结构,其相对于基座是可移动的,并且手术台和多个机械臂都可以可释放地安装在该结构上。外科医生通过远程控制单元命令机械臂对患者进行手术介入。
4、根据本发明,部分环形结构具有操作部分或区段,机械臂安装在该操作部分或区段上,并且该操作部分或区段可以侧向移动,特别是旋转,以便释放手术室中手术台周围的区域,以便外科医生或医疗操作员根据需要直接对患者采取行动。以这种方式,手术站可以用于机器人手术和非机器人手术,并且还可以在特定情况下(例如在紧急情况下)从一种模式快速转换到另一种模式。
5、根据优选实施例,部分环形结构的轮廓基本上限定了覆盖整个环形轮廓的360度中的大约270度的圆弧。
6、有利地,部分环形结构可相对于基座围绕平行于地面并穿过几何环轮廓的中心的滚动轴线旋转。
7、在部分环形结构的静止状态下,部分环形结构、手术台和/或机械臂-可能通过其相应的安装件-也可以相对于基座围绕垂直于滚动轴线并且平行于地面的俯仰轴线旋转。特别地,俯仰轴线可以是截取(intercepting)几何环轮廓的直径的轴线。
8、根据本公开的示例性实施例,手术台和/或机械臂-通过其相应的安装件-(也)围绕垂直于滚动轴线和俯仰轴线的偏航轴线相对于部分环形结构可旋转。例如,这种(额外的)自由度可以使患者的手术准备或机械臂和相关的手术工具或末端执行器的设置变得容易。
9、在优选实施例中,在标准状态下,手术台可以基本上平行于所述俯仰轴线(即根据几何环轮廓的弦纵向延伸)地定位在所述基座上。
10、有利地,手术台和机械臂,特别是其相应的安装件,可以布置在部分环形结构的相对侧。
11、手术台和/或机械臂可以支撑在具有伸缩结构的相应安装件上,从而允许调节它们的(相互)位置。
12、根据本发明的实施例,手术台可以被配置为可移除地安装在站基座上。因此,可以将患者布置在手术台上,并在进入手术室之前准备进行手术,其中,手术台可以连接到手术站。此外,手术后移除手术台允许患者舒适地返回他/她的病房,而无需将他/她转移到另一张床或支撑件。
13、例如,手术台通常可以被配置为患者的床。
14、优选地,整个机器人手术站,在其基座,可以安装在轮上,或类似的移动装置,使机器人手术站在手术环境中移动或从一个环境(例如,房间)移动到另一个环境。
15、根据本发明的示例实施例,机械臂可以是模块化的或者可以在不同位置处组装在该结构上,以便允许外科医生基于特定手术介入的要求来布置和重新布置它们。为此,部分环形结构的安装件可包括环形框架。
16、可以附接到所述环形框架-或可附接到可操作连接的安装结构的机械臂的数量取决于具体的实施例,所述具体的实施例可以根据具体的手术需要而变化(即,该站实行“开放平台”)。因此,可以实现手术站的不同设置和优化设置,例如用于前列腺手术、肺部手术等。
17、根据本发明的机器人手术站的进一步的优点和特征对于本领域技术人员来说将从以下对其实施例的详细且非限制性的描述中变得清楚。
技术特征:
1.一种机器人手术站(1),其特征在于,包括:
2.根据权利要求1所述的机器人手术站(1),其特征在于,所述部分环形结构(210)具有弧形轮廓,所述弧形轮廓基本上成形为圆周的弧,优选地覆盖整个周向轮廓360度中的270度。
3.根据权利要求1或2所述的机器人手术站(1),其特征在于,所述部分环形结构(210)的所述第二弧形区段(212)可相对于所述第一弧形区段(211)围绕与所述滚动轴线(r)正交的纵向轴线(l)侧向旋转。
4.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,包括一个或多个锁定致动器(232),所述锁定致动器(232)介于所述部分环形结构(210)的所述第一弧形区段(211)和所述第二弧形区段(212)之间。
5.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述部分环形结构(210)具有围绕所述滚动轴线(r)的360度的旋转范围。
6.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述部分环形结构(210)相对于所述基座(100)围绕所述滚动轴线(r)逆时针和顺时针可旋转。
7.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述基座(100)包括移位装置,尤其是轮(110),以便在环境中是可移动的。
8.根据前述权利要求所述的机器人手术站(1),其特征在于,所述基座(100)包括安装在所述移位装置(110)上的地面平台(101)。
9.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述第一安装件(220)和/或所述第二安装件(250)相对于所述基座(100)围绕垂直于所述滚动轴线(r)的俯仰轴线(p)可旋转。
10.根据前述权利要求所述的机器人手术站(1),其特征在于,所述第一安装件(220)和所述第二安装件(250)围绕所述俯仰轴线(p)的旋转是机电同步的。
11.根据权利要求9或10所述的机器人手术站(1),其特征在于,在所述机器人手术站(1)的静止配置中,所述滚动轴线(r)和所述俯仰轴线(p)平行于所述地面。
12.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述第一安装件(220)和/或所述第二安装件(250)具有伸缩结构。
13.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述第一安装件(220)和/或所述第二安装件(250)包括液压或机电线性致动器。
14.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述第一安装件(220)和/或所述第二安装件(250)、或其部分,绕垂直于所述滚动轴线(r)的偏航轴线(y)可旋转,并且优选地被配置为在所述机器人手术站(1)的静止状态下垂直于所述地面。
15.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述手术台(600)被配置为可移除地安装在所述部分环形结构(210)上。
16.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述基座(100)包括用于集成医疗设备的元件,特别是机架(121、122),所述医疗设备例如是麻醉设备。
17.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,包括远程控制单元(801),所述远程控制单元被配置为由外科医生使用以命令所述多个机械臂(900)中的一个或多个。
18.根据前述权利要求中任一项所述的机器人手术站(1),其特征在于,所述手术台(600)和所述机械臂(900)布置在所述部分环形结构(210)的相对侧处。
19.一种机器人手术站,其特征在于,包括:
20.根据权利要求19所述的机器人手术站,其特征在于,所述结构还包括轮和紧凑配置,使得所述结构能够容易地在房间之间移动。
21.根据权利要求19所述的机器人手术站,其特征在于,还包括可选择性地附接到所述结构的第二机械臂安装件和麻醉站。
技术总结
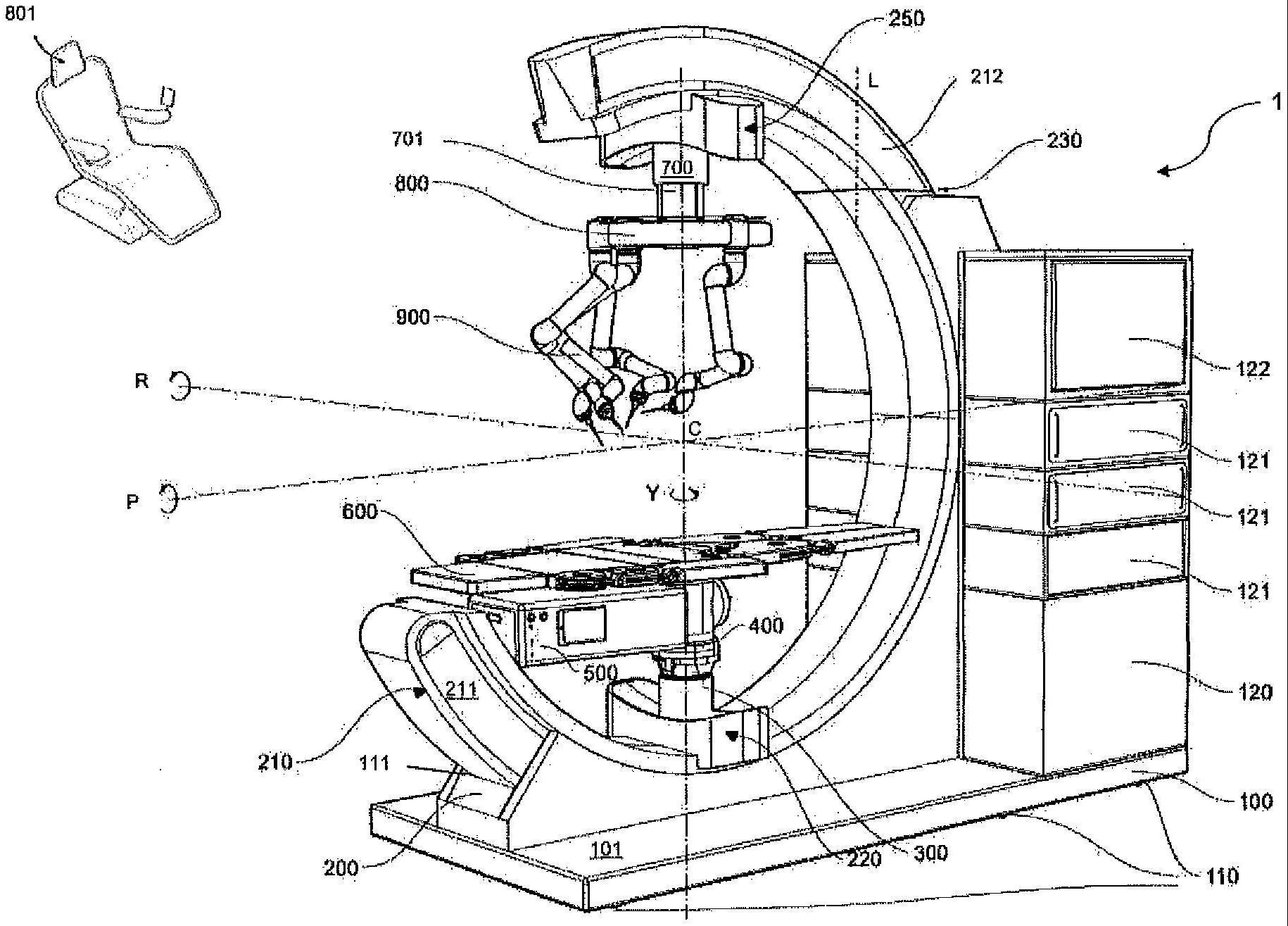
一种机器人手术站(1),包括:■有轮基座(100),被配置为放置在地面上;■部分环形结构(210),可滑动地联接到基座(210),以相对于基座(100)围绕通过环形中心(C)的水平滚动轴线(R)可旋转;■患者的床(600),在第一安装件(220)处被约束到部分环形结构(210)的第一弧形区段(211);*多个机械臂(900),在第二安装件(250)处被约束到部分环形结构(210)的第二弧形区段(212)上;以及■远程控制单元(801),可由外科医生使用来命令多个机械臂(900)中的一个或多个,其中第二弧形区段(212)相对于第一弧形区段(211)可以允许外科医生完全接近患者的床(600)的方式侧向旋转。
技术研发人员:P·C·吉里安诺第,A·沃格勒
受保护的技术使用者:伊利诺伊大学董事会
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!