用于改进机器人外科系统中的外部工作空间的系统和方法与流程
本文所公开的系统和方法涉及改进机器人外科系统中的外部工作空间,并且更具体地涉及优化三角测量并避免机器人系统部件之间的碰撞。
背景技术:
1、在机器人外科规程中,一个或多个机器人臂可用于操纵窥视镜,而一个或多个附加的机器人臂可用于操纵器械。机器人臂、窥视镜和器械都可能占据患者的外部环境或工作空间的一部分。
2、在利用多个臂的机器人系统中,一个或多个机器人臂到达期望的外科位置可能是具有挑战的。基于臂相对于机器人系统的配置,臂可能位于相互碰撞的路径中。如果一个或多个臂不能到达期望的外科位置,则在机器人臂与其相关联的工具之间实现三角测量可能是具有挑战的。
3、因此,需要提供优化外部工作空间以实现机器人臂的适当到达范围和优化的三角测量的机器人系统和方法。
技术实现思路
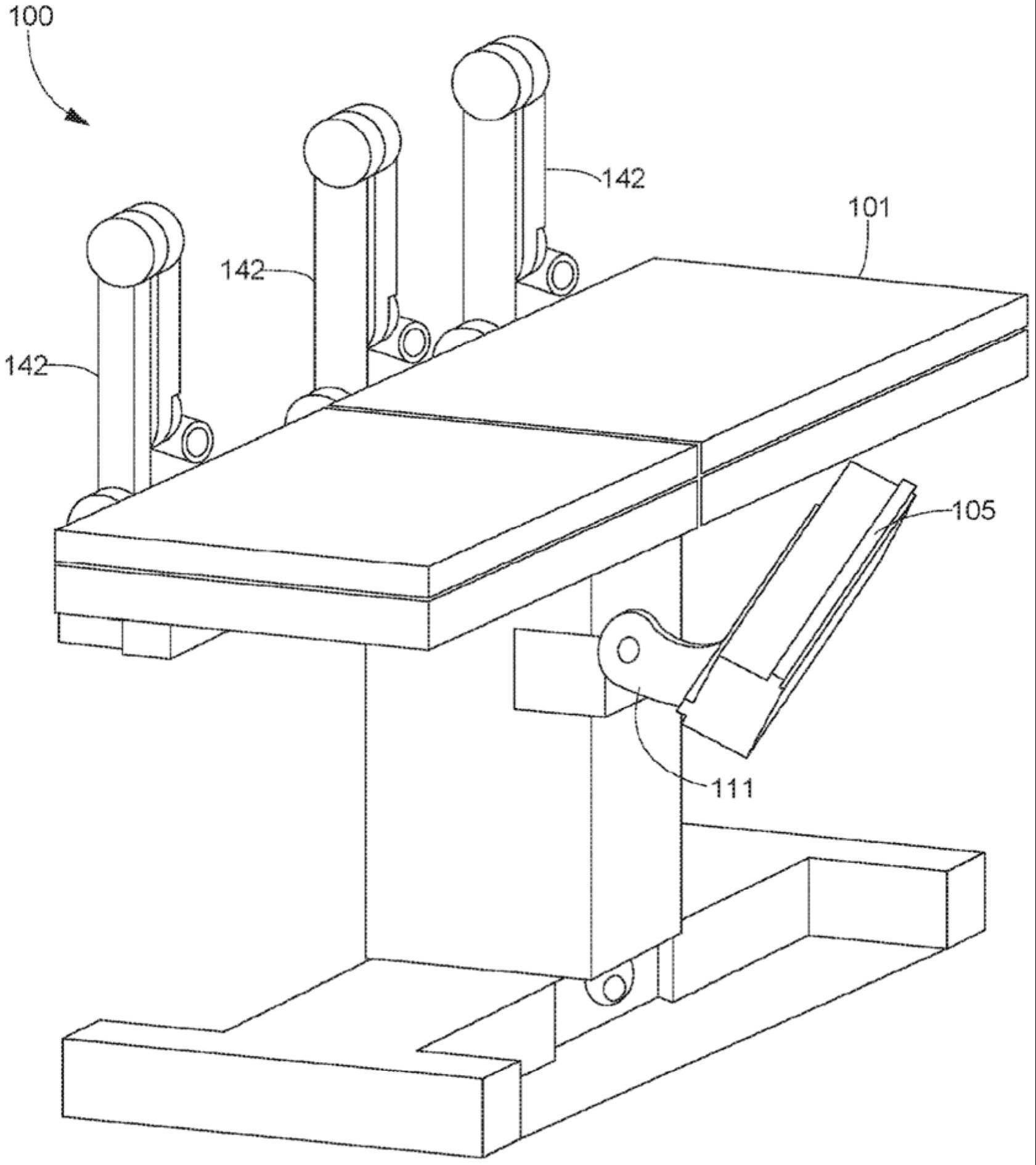
1、提供了机器人系统、装置和方法以增强外部外科工作空间,优化外科三角测量并增强机器人臂到达具有挑战性的外科位置。在一些实施方案中,一种机器人外科系统包括:台,该台用于支撑患者;可调式臂支撑件,该可调式臂支撑件联接到该台;和一个或多个机器人臂,该一个或多个机器人臂联接到该可调式臂支撑件。
2、在一些实施方案中,可调式臂支撑件可以能够具有至少五个自由度,包括竖直平移、二头肌卷曲、侧向平移、倾斜和水平摆动。根据一些实施方案,可调式臂支撑件中的每个可调式臂支撑件可支撑一个或多个机器人臂,其中至少一个机器人臂联接到延伸器杆。至少一个机器人臂能够平移延伸器杆以便在俯仰或偏航轴线上移动附接到该延伸器杆的套管。在一些实施方案中,可调式臂支撑件是弯曲或起伏的。在一些实施方案中,可调式臂支撑件包括分体式导轨,该分体式导轨包括可独立移动的第一导轨区段和第二导轨区段。
3、在一些实施方案中,一种机器人外科系统包括:台,该台用于支撑患者;可调式臂支撑件,该可调式臂支撑件联接到该台;和一个或多个机器人臂,该一个或多个机器人臂联接到该可调式臂支撑件。可调式臂支撑件包括从可调式臂支撑件向外(例如,向中间或侧向)突出的延伸板。机器人臂可以能够沿着可调式臂支撑件和延伸板平移。
4、在一些实施方案中,一种机器人外科系统包括:台,该台用于支撑患者;可调式臂支撑件,该可调式臂支撑联接到该台;和第一机器人臂和第二机器人臂,该第一机器人臂和该第二机器人臂联接到相邻臂支撑件,其中第一机器人臂相对于第二机器人臂具有高度差。在一些实施方案中,第一机器人臂包括可以是静态或动态的升降器。在一些实施方案中,第一机器人臂包括呈诸如球状肩关节、棱柱关节或旋转关节的可致动关节的形式的动态升降器。在一些实施方案中,第一机器人臂可相对于第二机器人臂具有高度差。
技术特征:
1.一种机器人外科系统,包括:
2.根据权利要求1所述的机器人外科系统,其中,所述可调式臂支撑件能够具有至少五个自由度。
3.根据权利要求2所述的机器人外科系统,其中,所述至少五个自由度包括竖直平移、二头肌卷曲、侧向平移、倾斜和水平摆动。
4.根据权利要求1所述的机器人外科系统,其中,当所述可调式臂支撑件在所述台的所述方向上水平地摆动时,所述可调式臂支撑件的第一端部更靠近所述台并且所述可调式臂支撑件的第二端部更远离所述台。
5.根据权利要求4所述的机器人外科系统,其中,所述一个或多个机器人臂包括第一机器人臂和第二机器人臂,其中所述第一机器人臂被定位成更靠近所述可调式臂支撑件的所述第一端部,并且所述第二机器人臂被定位成更靠近所述可调式臂支撑件的所述第二端部。
6.根据权利要求5所述的机器人外科系统,其中,所述第一机器人臂联接到窥视镜并且所述第二机器人臂联接到器械。
7.根据权利要求5所述的机器人外科系统,其中,所述第一机器人臂联接到延伸器杆。
8.根据权利要求7所述的机器人外科系统,其中,所述延伸器杆的第一端部联接到所述第一机器人臂,并且所述延伸器杆的第二端部联接到套管。
9.根据权利要求8所述的机器人外科系统,其中,所述第一机器人臂能够平移所述延伸器杆,以便在俯仰或偏航轴线上移动所述套管。
10.根据权利要求1所述的机器人外科系统,其中,所述可调式臂支撑件是弯曲的。
11.根据权利要求1所述的机器人外科系统,其中,所述可调式臂支撑件是起伏的。
12.根据权利要求1所述的机器人外科系统,还包括位于所述可调式臂支撑件上的用于检测外部对象的一个或多个传感器。
13.根据权利要求12所述的机器人外科系统,其中,所述一个或多个传感器包括基于视觉的传感器。
14.根据权利要求13所述的机器人外科系统,其中,基于来自所述基于视觉的传感器的信息来生成外部对象的标测图。
15.根据权利要求1所述的机器人外科系统,其中,所述可调式臂支撑件包括分体式导轨,所述分体式导轨包括第一导轨区段和第二导轨区段,其中所述第一导轨区段相对于所述第二导轨区段是能够独立控制的。
16.一种机器人外科系统,包括:
17.根据权利要求16所述的机器人外科系统,其中,所述延伸板从所述延伸板的纵向轴线向中间或侧向向外延伸。
18.根据权利要求16所述的机器人外科系统,其中,所述一个或多个机器人臂包括能够沿着所述可调式臂支撑件和所述延伸板平移的第一机器人臂。
19.根据权利要求16所述的机器人外科系统,其中,所述延伸板包括踏板。
20.根据权利要求16所述的机器人外科系统,其中,所述延伸板与所述可调式臂支撑件可移除地联接。
21.一种机器人外科系统,包括:
22.根据权利要求21所述的机器人外科系统,其中,所述第一机器人臂包括升降器。
23.根据权利要求22所述的机器人外科系统,其中,所述升降器包括静态升降器。
24.根据权利要求22所述的机器人外科系统,其中,所述升降器包括呈可致动关节的形式的动态升降器。
25.根据权利要求24所述的机器人外科系统,其中,所述动态升降器包括球状肩关节。
26.根据权利要求24所述的机器人外科系统,其中,所述动态升降器包括棱柱关节。
27.根据权利要求24所述的机器人外科系统,其中,所述动态升降器包括形成在第一升降器联杆与第二升降器联杆之间的旋转关节。
28.根据权利要求27所述的机器人外科系统,其中,旋转轴线在所述第一升降器联杆与所述第二升降器联杆之间延伸。
29.根据权利要求28所述的机器人外科系统,其中,所述旋转轴线大致沿着所述可调式臂支撑件的长度延伸。
30.根据权利要求28所述的机器人外科系统,其中,所述旋转轴线大致垂直于所述可调式臂支撑件的长度延伸。
31.根据权利要求21所述的机器人外科系统,其中:
32.根据权利要求31所述的机器人外科系统,其中所述第一基部相对于所述第二基部具有高度差。
33.根据权利要求31所述的机器人外科系统,其中,所述第一远侧联杆相对于所述第二远侧联杆具有高度差。
技术总结
某些方面涉及用于改进机器人外科系统中的外部工作空间的系统和技术。这些机器人外科系统可包括台和至少一个可调式臂支撑件,该至少一个可调式臂支撑件支撑一个或多个机器人臂。该可调式臂支撑件可以能够在该台的方向上水平地摆动。板延伸部可从该可调式臂支撑件向外延伸。延伸器杆可联接到该机器人臂中的一者或多者以及套管。高度差可设置在支撑于该可调式臂支撑件上的第一机器人臂与第二机器人臂之间。
技术研发人员:F·H·摩尔,G·谢,黄亚楠,N·J·艾尔,A·T·哈桑,R·L·德文根佐
受保护的技术使用者:奥瑞斯健康公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!