通过数字图像相关跟踪视网膜牵引的制作方法
本公开涉及一种用于量化、跟踪和减轻视网膜手术期间视网膜上的牵引力的基于成像的策略。
背景技术:
1、眼睛的玻璃体切除术和其他有创手术需要外科医生将专门的外科手术工具插入到患者眼球的玻璃体腔中,然后在执行特定的外科手术技术时操纵这些外科手术工具。外科医生的动作由视网膜和周围眼内组织的高度放大图像实时指导。为此,放大的视网膜图像通常显示在外科医生和其他主治临床医生的视野内。同时,放大的视网膜可以通过其他方式观看,如通过高倍眼科显微镜的目镜观看。
2、如本领域所理解的,玻璃体腔在人眼的晶状体与视网膜之间延伸,其中,晶状体和视网膜分别位于眼球的前部区域和后部区域。玻璃体腔被称为玻璃体液的透明凝胶状物质占据,玻璃体液本身被包裹在称为玻璃体皮质的薄膜内。视网膜通过另一层薄的中间组织(即内界膜或ilm)与玻璃体隔离。
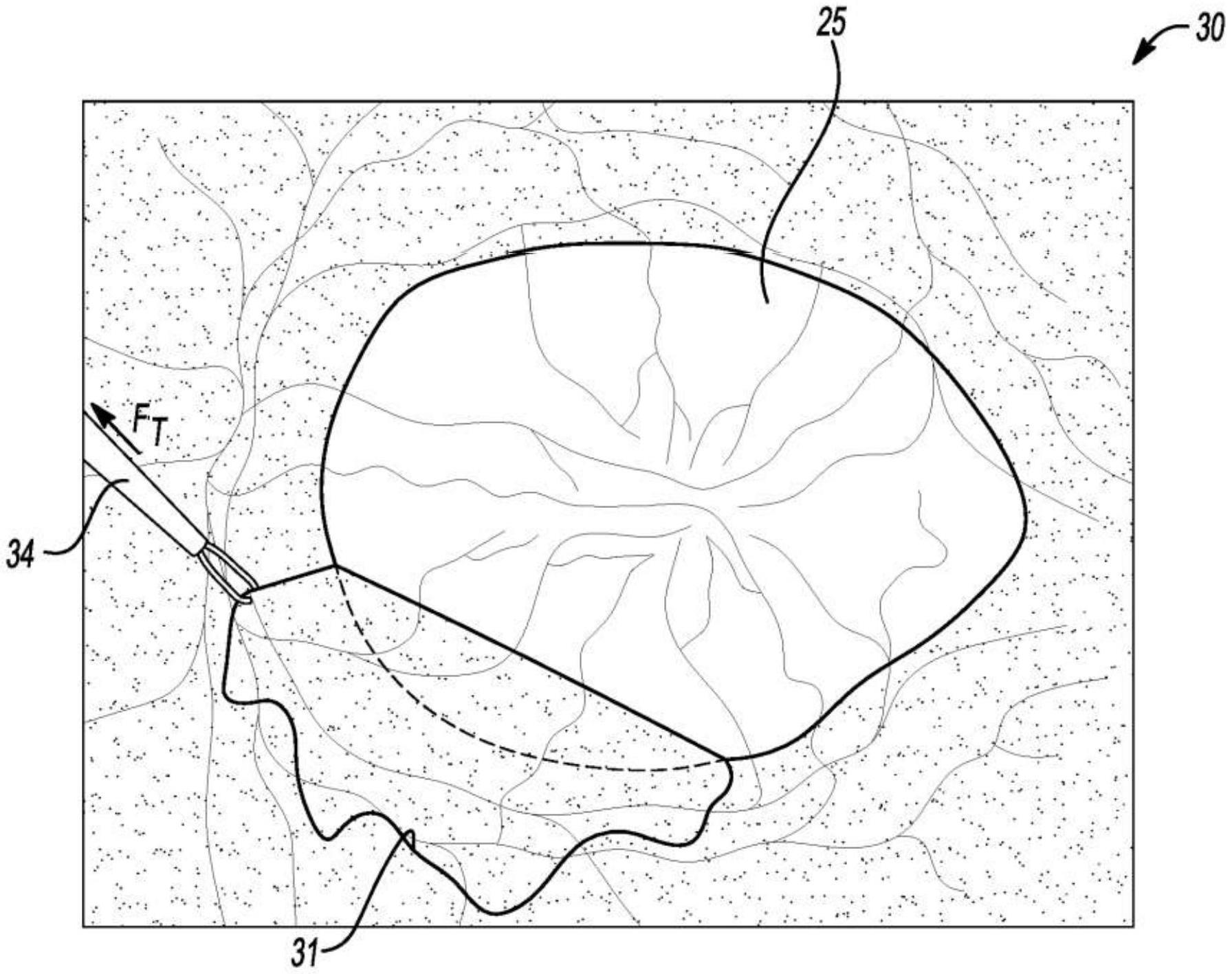
3、由于ilm粘附在视网膜表面,因此常见的眼科手术(如黄斑裂孔或视网膜撕裂的修复、疤痕组织的去除和其他精细的眼部手术)可能需要主治医生牢牢地抓住ilm并小心地将其从背衬视网膜上剥离。ilm剥离具有放松受干扰视网膜的效果,同时也为外科医生提供了不受阻碍地接近视网膜表面的通道。ilm剥离手术的执行涉及外科医生对ilm施加的牵引力的有意应用。当外科医生操纵ilm远离视网膜时,这种力会转移到附着的视网膜上。由此产生的跨视网膜表面的牵引在本文中和在一般技术中被称为视网膜牵引。
技术实现思路
1、本文公开了用于量化眼科手术(主要但不一定限于玻璃体切除术和其他有创眼部手术)执行期间的视网膜牵引的基于自动成像的系统和方法。如本领域所理解的,用于操纵内界膜(ilm)的替代性方法包括镊子辅助的“捏和剥”技术和基于摩擦的技术,后者利用专门的刮削环,例如,可从爱尔康有限公司(alcon,inc.)商购获得的finessetm柔性环形弯曲镍钛诺环。使用这两种示例性工具会导致视网膜牵引,这有时可能导致医源性ilm撕裂和其他可能的眼部创伤。
2、给定患者眼睛的ilm结构完整性往往由于如遗传、年龄、损伤和疾病等因素而变化。因此,很难预测特定幅度和持续时间的施加视网膜牵引对给定患者眼睛的影响。同样,外科医生技能水平的变化、给定外科医生所采用的外科手术工具的内在能力和局限性以及其他因素可能会产生截然不同的最终结果。因此,本解决方案旨在减少视网膜手术期间的不确定性,同时改善外科手术结果并提高外科医生的整体信心。
3、为了实现这些和其他可能的目标,本方法依赖于收集和处理视网膜的立体图像,以及自动和/或在外科医生的指导下将目标像素(“跟踪点”)指派为立体图像数据的立体图像对内的重合像素。在不同的实施例中,使用电子控制单元(ecu)(例如独立或分布式计算机装置,或与立体相机部分地或完全地集成的相关联硬件)在眼科手术期间密切监测所指派的跟踪点的相对运动。
4、本文所述的ecu使用牵引模型来自动量化视网膜牵引,其中,ecu最终输出指示这种视网膜牵引的幅度的数字牵引系数。在简化的方法中,数字牵引系数可以是指示幅度的无单位值,例如,最大值为1且最小值为0的归一化值。ecu基于数字牵引系数实时自动地提醒外科医生,如当可能在视网膜的整个表面区域上或者在其指定区或区域内平均的数字牵引系数超过对应牵引阈值时。在一些实施例中,可以生成实时音频、视觉和/或触觉警报,以使得外科医生能够对由外科医生施加给ilm的拖力或拉力做出更明智的调整。
5、在非限制性示例性实施例中,用于量化眼科手术期间的这种视网膜牵引的跟踪系统包括指示器装置、立体相机和ecu。在该特定实施例中与指示器装置进行有线或无线通信的ecu被配置成从立体相机接收立体图像数据,其中,ecu可能与立体相机集成或者作为与其通信的单独硬件存在。然后,控制器自主地或使用外科医生指导的输入信号指派立体图像对内的目标像素,其中,为了简单明了,这种指派的目标像素在下文中被称为“跟踪点”。
6、该代表性配置中的ecu用上述牵引模型进行编程。虽然可以使用各种方法来实施所设想的牵引模型,但一种可能的解决方案包括基于软件的逻辑框,该逻辑框被配置成对所收集的立体图像自动执行数字图像相关(dic)处理,其中,dic处理用于确定跟踪点的相对运动。然后,ecu例如使用查找表将跟踪点的相对运动与引起这种运动发生的特定视网膜牵引相关联,然后,ecu输出上述数字牵引系数。因此,所提供的数字牵引系数指示如上所述的视网膜牵引的幅度。然后,ecu基于数字牵引系数针对指示器装置执行适当的控制动作,例如当数字牵引系数的幅度超过预先校准的阈值或用户可校准的阈值时。
7、为了确保ecu跟踪的相对运动主要是由外科医生施加的视网膜牵引而不是由如患者引起的和/或外部引起的眼睛运动等其他力引起的基线运动引起的,ecu可以被配置成将自由体/实心体运动滤波器应用于相对运动,以考虑并最终滤出这种基线运动。
8、指示器装置可以包括一个或多个高分辨率显示屏,例如4k或更高分辨率的led背光医疗级监视器。在这样的实施例中,ecu可以被配置成单独或结合文本消息或提示经由(多个)显示屏自动呈现视网膜表面的直观“热图”。在一些配置中,例如,在逐像素或逐区域的基础上,所显示的热图(其以图形方式表示视网膜牵引的当前水平)可以精准确定相对高牵引的位置。这样的热图可以如以叠加到三维眼底图像的形式显示在所显示的视网膜立体图像的顶部,以指示对应的高牵引区。
9、还公开了一种用于量化眼科手术期间的视网膜牵引的附属方法。根据示例性实施例,该方法包括在眼科手术期间经由ecu从立体相机接收立体图像数据,其中,立体图像数据包括立体图像对。该方法还包括将跟踪点指派为立体图像对内的重合像素,并使用立体图像对经由ecu自动执行dic处理。以这种方式,ecu确定跟踪点的相对运动。
10、此外,该特定实施例中的方法包括使用ecu的牵引图将跟踪点的相对运动与视网膜牵引相关联,从而确定指示视网膜牵引的幅度的数字牵引系数。然后,ecu使用指示器装置来执行控制动作,其中,控制动作基于数字牵引系数并且指示视网膜牵引的幅度。
11、本文还公开了一种用于量化患者眼睛的视网膜上的视网膜牵引的系统,其中,该系统包括中央处理单元(cpu)和计算机可读介质,在该计算机可读介质上记录了一组指令。由cpu执行指令使得cpu在眼科手术期间从立体相机接收包括一个或多个立体图像对的立体图像数据,并且将跟踪点指派为(多个)立体图像对内的重合像素。cpu还使用立体图像自动执行dic处理,以确定跟踪点的相对运动。在该特定实施例中,cpu使用牵引图将跟踪点的相对运动与视网膜牵引相关联,作为指示视网膜牵引的幅度的数字牵引系数。然后,当数字牵引系数超过一个或多个校准的牵引阈值时,cpu将控制信号传送到外部指示器装置。
12、通过以下结合附图对实施本公开的最佳模式的详细描述,本公开的上述特征和优点以及其他可能的特征和优点将显现。
技术特征:
1.一种用于量化眼科手术期间患者眼睛中的视网膜牵引的跟踪系统,所述跟踪系统包括:
2.如权利要求1所述的跟踪系统,其中,所述立体相机包括与所述ecu集成的本地控制处理器。
3.如权利要求1所述的跟踪系统,其中,作为所述dic处理的一部分,所述ecu被配置成将实心体运动滤波器应用于所述相对运动以考虑所述视网膜的实心体运动。
4.如权利要求1所述的跟踪系统,其中,所述指示器装置包括一个或多个高分辨率显示屏。
5.如权利要求4所述的跟踪系统,其中,所述ecu被配置成当所述数字牵引系数超过校准的牵引阈值时通过调整所述一个或多个高分辨率显示屏的设置来基于所述数字牵引系数执行所述控制动作。
6.如权利要求5所述的跟踪系统,其中,调整所述一个或多个高分辨率显示屏的设置包括经由所述一个或多个高分辨率显示屏来显示所述视网膜牵引的颜色编码热图。
7.如权利要求6所述的跟踪系统,其中,所述ecu被配置成在由所述立体图像对形成的立体图像的顶部显示所述视网膜牵引的颜色编码热图。
8.如权利要求1所述的跟踪系统,其中,所述ecu被配置成响应于所述数字牵引系数超过校准的牵引阈值而执行所述控制动作。
9.如权利要求8所述的跟踪系统,其中,所述ecu被配置成从所述跟踪系统的用户接收可校准输入,并基于所述可校准输入来调整所述校准的牵引阈值。
10.一种用于量化眼科手术期间患者眼睛的视网膜上的视网膜牵引的方法,所述方法包括:
11.如权利要求10所述的方法,其中,自动执行所述dic处理包括将实心体运动滤波器应用于所述相对运动,从而考虑所述视网膜的实心体运动。
12.如权利要求10所述的方法,其中,所述指示器装置包括一个或多个显示屏,并且其中,基于所述数字牵引系数执行所述控制动作包括当所述数字牵引系数超过校准的牵引阈值时调整所述一个或多个显示屏的设置。
13.如权利要求12所述的方法,其中,调整所述设置包括经由所述一个或多个显示屏来显示所述视网膜牵引的颜色编码热图。
14.如权利要求13所述的方法,其中,显示所述视网膜牵引的颜色编码热图包括在由所述立体图像对形成的立体图像的顶部显示所述颜色编码热图。
15.如权利要求10所述的方法,其中,响应于所述数字牵引系数执行所述控制动作包括将所述数字牵引系数与校准的牵引阈值进行比较,并且当所述数字牵引系数超过所述校准的牵引阈值时激活所述指示器装置。
16.如权利要求15所述的方法,进一步包括经由所述ecu接收可校准输入,然后基于所述可校准输入来调整所述校准的牵引阈值。
17.如权利要求15所述的方法,其中,所述校准的牵引阈值包括多个牵引阈值,每个牵引阈值对应于所述视网膜的不同区或区域。
18.如权利要求10所述的方法,进一步包括响应于指示过去外科手术结果的历史数据而随时间调节所述校准的牵引阈值。
19.一种用于量化患者眼睛的视网膜上的视网膜牵引的系统,所述系统包括:
20.如权利要求19所述的系统,其中,所述外部指示器装置包括显示屏,并且其中,所述控制信号被配置成经由所述显示屏来显示所述视网膜牵引的颜色编码热图。
技术总结
一种用于量化患者眼睛的视网膜上的视网膜牵引的跟踪系统包括指示器装置、立体相机和电子控制单元(ECU)。该立体相机收集并输出立体图像数据。与该指示器装置通信的ECU通过在眼科手术期间从该立体相机接收该立体图像数据然后将跟踪点指派为立体图像对内的重合像素来执行方法。该ECU还使用这些立体图像对自动执行数字图像相关(DIC)处理以确定这些跟踪点的相对运动,并使用牵引图将这些跟踪点的相对运动与该视网膜牵引相关联。生成指示视网膜牵引的幅度的数字牵引系数。该ECU基于该数字牵引系数使用该指示器装置来执行控制动作。
技术研发人员:N·马切奥
受保护的技术使用者:爱尔康公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!