用于血管介入机器人的导引导管的驱动和定位装置的制作方法
本发明涉及血管介入治疗的医疗器械领域,更具体地涉及一种用于血管介入机器人的导引导管的驱动和定位装置。
背景技术:
1、血管介入手术是以影像学为基础,在x射线、超声或ct等设备的引导下,利用导丝、导管或支架,以及其他的医疗器械对疾病进行诊断和治疗,是一种较先进的微创技术。将导管或导引装置手动插入患者体内是相对常规的外科手术。
2、血管介入手术机器人用于实施血管介入手术。但是,手术开始前,各模块的初始位置,微机控制系统不易定位,因此,需要一种技术精准定位各模块的初始位置,从而提高手术机器人的操作精度。
技术实现思路
1、本发明的目的在于提供一种用于血管介入机器人的导引导管的驱动和定位装置,在手术前有效定位导引导管控制模块,且在手术过程中又不妨碍所述模块各部件之间相对运动,避免各部件之间的不需要的相对位移而导致的精度损失。
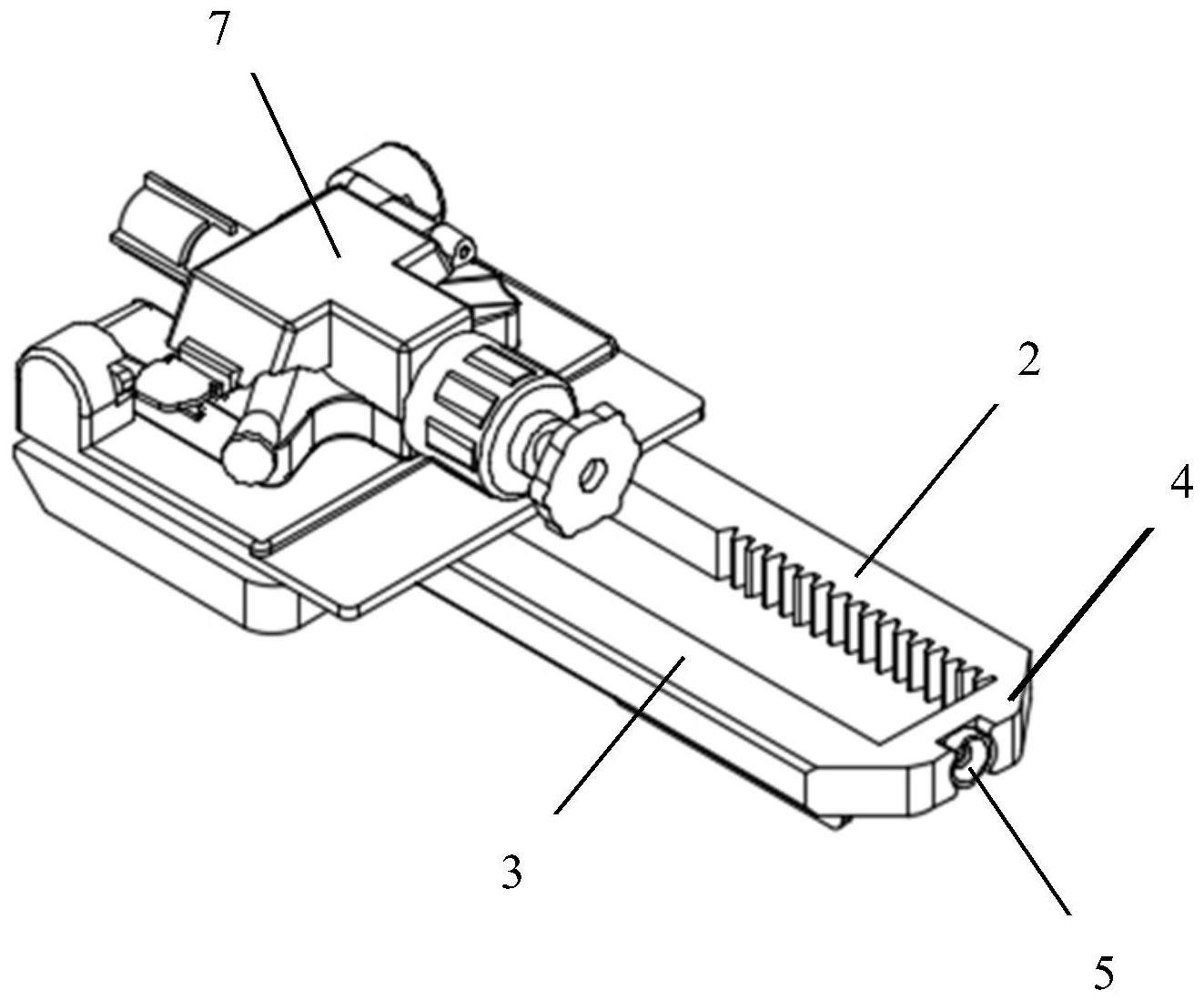
2、本发明提供了一种用于血管介入机器人的导引导管的驱动和定位装置,所述机器人用于血管介入治疗,包括远程微机操控端、手术定位机械臂和终端执行系统,其中,所述终端执行系统固定在所述手术定位机械臂的末端上,且随所述手术定位机械臂移动,所述远程微机操控端控制所述手术定位机械臂的运动和所述终端执行系统内部的运动;所述终端执行系统包括导引导管控制模块,所述导引导管控制模块用于控制导引导管的前进或后退,所述导引导管控制模块包括y型台组件,所述y型台组件包括上方的y型阀和下方的驱动和定位装置;所述y型阀远端端口连接所述导引导管,近端端口穿入所述导丝,所述导丝通过所述y型阀进入所述导引导管,并沿着所述导引导管内腔到达手术部位;所述驱动和定位装置包括齿条框,所述y型阀固定在所述齿条框上;齿轮,所述齿轮与所述齿条框上的直齿条啮合连接;安装在所述齿条框上的运动磁性件;和与所述运动磁性件相作用的固定磁性件;其中,所述固定磁性件固定在所述终端执行系统的壳体上。
3、在另一优选例中,所述齿条框包括第一齿边,第二直边和第三连接边。
4、在另一优选例中,所述第一齿边上设有与所述齿轮相啮合的直齿条,所述第二直边和所述第一齿边平行相对设置。
5、在另一优选例中,所述第三连接边将所述第一齿边和所述第二直边连接成一体形成半包围结构,所述齿轮位于所述半包围结构中。
6、在另一优选例中,所述齿轮的一端与所述第一齿边的直齿条相啮合,所述齿轮的另一端与所述第二直边相抵。
7、在另一优选例中,所述运动磁性件固定在所述第三连接边上。
8、在另一优选例中,在手术前,所述齿条框通过所述运动磁性件与固定在所述终端执行系统的壳体上的所述固定磁性件相作用,防止所述齿条框随意滑动,从而使得所述y型阀固定在初始位置。
9、在另一优选例中,在手术过程中,驱动装置驱动所述齿轮转动,由于所述齿轮和所述齿条框的啮合关系,所述齿条框克服所述固定磁性件的作用而向前移动,从而带动所述y型阀向前移动。
10、在另一优选例中,所述驱动装置为非接触式电机系统。
11、在另一优选例中,所述非接触式电机系统包括电机、与所述电机联接且由所述电机驱动的第一磁感应联轴器、与所述第一磁感应联轴器相对应设置的第二磁感应联轴器、和与所述第二磁感应联轴器联接的传动结构;其中,所述第一磁感应联轴器和所述第二磁感应联轴器同轴心相对;所述第一磁感应联轴器和所述第二磁感应联轴器之间的距离为2-20毫米。
12、在另一优选例中,所述非接触式电机系统的数量为2-10个。
13、在另一优选例中,所述终端执行系统包括执行壳体和驱动壳体,其中所述执行壳体装载用于驱动所述介入器材的前进、后退和旋转的机械部件,所述驱动壳体装载用于为所述机械部件提供动力的电动组件。
14、在另一优选例中,所述电机固定在所述驱动壳体中,所述第二磁感应联轴器固定在所述执行壳体的底面壁上。
15、在另一优选例中,在所述该对第一磁感应联轴器和第二磁感应联轴器的支撑下,在所述执行壳体和所述驱动壳体之间形成厚度为2-20毫米的空间层。
16、在另一优选例中,在所述执行壳体和所述驱动壳体之间铺设有无菌布,用于减少对所述驱动壳体中部件的污染。
17、在另一优选例中,所述无菌布为隔血无菌布。
18、在另一优选例中,所述传动结构为齿轮组结构或者蜗杆结构。
19、在另一优选例中,所述终端执行系统包括所述介入器材中的导丝控制模块,所述导丝控制模块包括通过转动轮组控制所述导丝的旋转的转动组件和通过行进轮组控制所述导丝前进或后退的行进组件;其中,所述转动轮组和所述行进轮组均通过所述非接触式电机系统驱动。
20、在另一优选例中,所述终端执行系统包括所述介入器材中的通过摩擦轮组控制球囊导管或支架导管的前进或后退的球囊/支架控制模块,和所述介入器材中的通过齿轮齿条组控制导引导管的前进或后退的导引导管控制模块;其中,所述摩擦轮组和所述齿轮齿条组均通过所述非接触式电机系统驱动。
21、本发明的主要优点包括:
22、(a)手术前精确定位模块中各组件;
23、(b)手术中提高各组件的运动精度;
24、(c)结构简单,便于加工生产、组装和操作。
25、应理解,在本发明范围内中,本发明的上述各技术特征和在下文(如实施例)中具体描述的各技术特征之间都可以互相组合,从而构成新的或优选的技术方案。限于篇幅,在此不再一一累述。
技术特征:
1.一种用于血管介入机器人的导引导管的驱动和定位装置,其特征在于,
2.如权利要求1所述的驱动和定位装置,其特征在于,所述齿条框包括第一齿边,第二直边和第三连接边。
3.如权利要求2所述的驱动和定位装置,其特征在于,所述第一齿边上设有与所述齿轮相啮合的直齿条,所述第二直边和所述第一齿边平行相对设置。
4.如权利要求2所述的驱动和定位装置,其特征在于,所述第三连接边将所述第一齿边和所述第二直边连接成一体形成半包围结构,所述齿轮位于所述半包围结构中。
5.如权利要求4所述的驱动和定位装置,其特征在于,所述齿轮的一端与所述第一齿边的直齿条相啮合,所述齿轮的另一端与所述第二直边相抵。
6.如权利要求2所述的驱动和定位装置,其特征在于,所述运动磁性件固定在所述第三连接边上。
7.如权利要求1所述的驱动和定位装置,其特征在于,在手术前,所述齿条框通过所述运动磁性件与固定在所述终端执行系统的壳体上的所述固定磁性件相作用,防止所述齿条框随意滑动,从而使得所述y型阀固定在初始位置。
8.如权利要求1所述的驱动和定位装置,其特征在于,在手术过程中,驱动装置驱动所述齿轮转动,由于所述齿轮和所述齿条框的啮合关系,所述齿条框克服所述固定磁性件的作用而向前移动,从而带动所述y型阀向前移动。
9.如权利要求8所述的驱动和定位装置,其特征在于,所述驱动装置为非接触式电机系统。
10.如权利要求9所述的驱动和定位装置,其特征在于,所述非接触式电机系统包括电机、与所述电机联接且由所述电机驱动的第一磁感应联轴器、与所述第一磁感应联轴器相对应设置的第二磁感应联轴器、和与所述第二磁感应联轴器联接的传动结构;其中,所述第一磁感应联轴器和所述第二磁感应联轴器同轴心相对;所述第一磁感应联轴器和所述第二磁感应联轴器之间的距离为2-20毫米。
技术总结
本发明公开了一种用于血管介入机器人的导引导管的驱动和定位装置,导引导管控制模块包括Y型台组件,Y型台组件包括上方的Y型阀和下方的驱动和定位装置;Y型阀远端端口连接导引导管,近端端口穿入导丝,导丝通过Y型阀进入导引导管,并沿着导引导管内腔到达手术部位;驱动和定位装置包括齿条框,Y型阀固定在齿条框上;齿轮,齿轮与齿条框上的齿啮合连接;安装在齿条框上的运动磁性件;和与运动磁性件相作用的固定磁性件;其中,固定磁性件固定在终端执行系统的壳体上。本发明能够在手术前有效定位导引导管控制模块,且在手术过程中又不妨碍该模块各部件之间相对运动,避免各部件之间的不需要的相对位移而导致的精度损失。
技术研发人员:唐熠达,洪炯,张国庆
受保护的技术使用者:介若医疗科技(上海)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!