血管介入机器人执行手控制方法及系统与流程
本发明涉及医疗设备,具体地,涉及一种血管介入机器人执行手控制方法及系统,尤其涉及一种基于多线程的血管腔机器人执行手控制方法及系统。
背景技术:
1、血管介入机器人是辅助医生完成导丝、导管、球囊、支架的放置,完成病人的手术治疗。往往在手术过程中需要旋转动作与前进动作的协调与配合,在前进导丝的时候需要进行旋转,以达到导丝头部转向的目的,单纯的前进与单纯的旋转不能达到手术操作要求。
2、专利文献cn113995940a公开了一种微创血管介入手术机器人执行装置,用于对介入手术所用的导管/导丝进行捻旋推进,包括:底座;夹持部,安装于底座上,包括安装座、夹持电机、凸轮、小滑轨、压合块、压合弹簧以及固定块,当凸轮转动时推动压合块沿小滑轨移动,使压合块远离固定块,进而使得压合弹簧推动压合块沿小滑轨向固定块运动并将导管/导丝压紧;递送部,安装于底座上,包括递送电机、第一同步带轮、第二同步带轮以及直线滑轨;以及捻旋部,滑动连接于递送部上,包括滑动座、捻旋组件、夹紧组件。但该方法并未解决单纯的前进与单纯的旋转不能达到手术操作要求的技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种血管介入机器人执行手控制方法及系统。
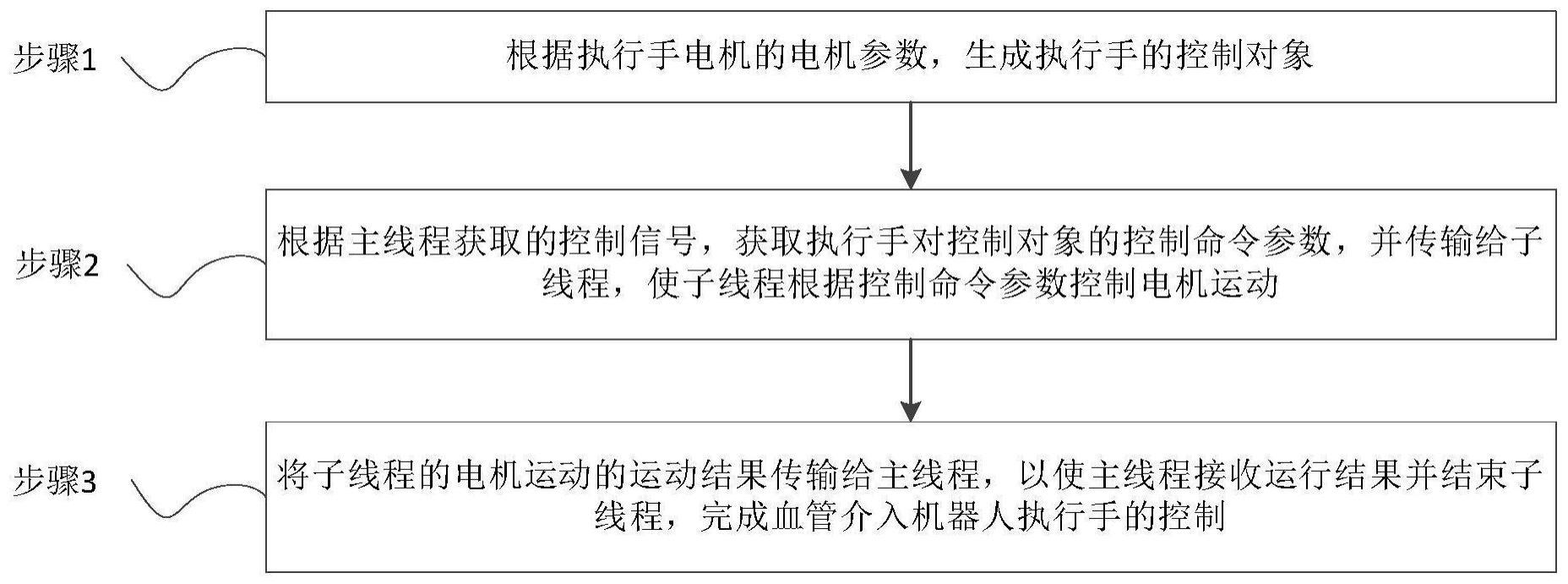
2、根据本发明提供的一种血管介入机器人执行手控制方法,包括:
3、步骤1:根据执行手电机的电机参数,生成执行手的控制对象;
4、步骤2:根据主线程获取的控制信号,获取执行手对控制对象的控制命令参数,并传输给子线程,使子线程根据控制命令参数控制电机运动;
5、步骤3:将子线程的电机运动的运动结果传输给主线程,以使主线程接收运行结果并结束子线程,完成血管介入机器人执行手的控制。
6、优选地,步骤1,包括:
7、步骤101:根据配置文件设定执行手电机的电机参数;
8、步骤102:读取电机参数,生成执行手的控住对象。
9、优选地,步骤2,包括:
10、步骤201:将执行手的子线程进行实例化;
11、步骤202:开始子线程并等待主线程的控制信号;
12、步骤203:将用户的控制信号发送给主线程,以使主线程获取执行手对控制对象的控制命令参数,并传输给子线程,使子线程根据控制命令参数控制电机运动。
13、优选地,电机参数,包括以下至少一种:电机基准速度、电机加速度、电机减速度、电机正极限位、电机负极限位和最大电流。
14、优选地,控制信号,包括一下至少一种:前进、后退、正向旋转、逆向旋转、夹紧、半开和全开。
15、根据本发明提供的一种血管介入机器人执行手控制系统,采用上述的血管介入机器人执行手控制方法,包括:初始化模块、主线程功能模块和子线程功能模块;
16、初始化模块,用于设定执行手电机的电机参数,以及完成电机参数的设定功能;
17、主线程功能模块,用于完成主线程功能;
18、子线程功能模块,用于完成子线程功能。
19、优选地,电机参数,包括以下至少一种:电机基准速度、电机加速度、电机减速度、电机正极限位、电机负极限位和最大电流。
20、优选地,电机参数的设定功能,包括:读取配置文件中的电机参数、生成执行手的控制对象和实例化执行手子线程。
21、优选地,主线程功能,包括:接收用户的控制命令、获取执行手电机运动速度比例、向子线程发送控制命令、接收子线程控制结果和显示执行手控制结果信息。
22、优选地,子线程功能,包括:接收主线程控制命令、执行主线程控制命令和向主线程发送控制结果。
23、与现有技术相比,本发明具有如下的有益效果:
24、1、本发明在传统的单部件控制技术中使用了多线程机制,同时利用多线程通信信号量机制完成多事件同步,提高了控制技术的控制效率。
25、2、本发明在数据处理速度和部件执行响应速度上做到了大幅度的提升,提高了机器人执行手的操作效率。
26、3、本发明传统的单个部件控制的技术中使用了多线程机制,使得执行手的控制效率更高,可以实现旋转加前进的协同操作,系统更加稳定可靠,真正实现了多线程编程,提高了机器人的操作效率。
技术特征:
1.一种血管介入机器人执行手控制方法,其特征在于,包括:
2.根据权利要求1所述的血管介入机器人执行手控制方法,其特征在于,所述步骤1,包括:
3.根据权利要求1所述的血管介入机器人执行手控制方法,其特征在于,所述步骤2,包括:
4.根据权利要求1所述的血管介入机器人执行手控制方法,其特征在于,所述电机参数,包括以下至少一种:电机基准速度、电机加速度、电机减速度、电机正极限位、电机负极限位和最大电流。
5.根据权利要求1所述的血管介入机器人执行手控制方法,其特征在于,所述控制信号,包括一下至少一种:前进、后退、正向旋转、逆向旋转、夹紧、半开和全开。
6.一种血管介入机器人执行手控制系统,其特征在于,采用权利要求1-5中任一项所述的血管介入机器人执行手控制方法,包括:初始化模块、主线程功能模块和子线程功能模块;
7.根据权利要求6所述的血管介入机器人执行手控制系统,其特征在于,所述电机参数,包括以下至少一种:电机基准速度、电机加速度、电机减速度、电机正极限位、电机负极限位和最大电流。
8.根据权利要求6所述的血管介入机器人执行手控制系统,其特征在于,所述电机参数的设定功能,包括:获取配置文件中的所述电机参数、生成所述执行手的控制对象和实例化执行手子线程。
9.根据权利要求6所述的血管介入机器人执行手控制系统,其特征在于,所述主线程功能,包括:接收用户的控制命令、获取执行手电机运动速度比例、向子线程发送控制命令、接收子线程控制结果和显示执行手控制结果信息。
10.根据权利要求6所述的血管介入机器人执行手控制系统,其特征在于,所述子线程功能,包括:接收主线程控制命令、执行主线程控制命令和向主线程发送控制结果。
技术总结
本发明提供了一种血管介入机器人执行手控制方法及系统,包括:步骤1:根据执行手电机的电机参数,生成执行手的控制对象;步骤2:根据主线程获取的控制信号,获取执行手对控制对象的控制命令参数,并传输给子线程,使子线程根据控制命令参数控制电机运动;步骤3:将子线程的电机运动的运动结果传输给主线程,以使主线程接收运行结果并结束子线程,完成血管介入机器人执行手的控制。与现有技术相比,本发明在传统的单个部件控制的技术中使用了多线程机制,使得执行手的控制效率更高,可以实现旋转加前进的协同操作,系统更加稳定可靠,真正实现了多线程编程,提高了机器人的操作效率。
技术研发人员:张晶晶,钱磊,刘道志,刘奕琨
受保护的技术使用者:上海奥朋医疗科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!