一种单孔微创外科手术机器人的手术执行臂悬挂布局结构
本发明涉及微创外科手术机器人,具体涉及一种单孔微创外科手术机器人的手术执行臂悬挂布局结构。
背景技术:
1、微创手术操作是指医生利用细长的手术工具通过人体表面的微小切口探入到体内进行手术操作;相比传统的开口手术,它具有手术切口小、出血量少、术后疤痕小、恢复时间快等优点,这使得病人遭受的痛苦大大减少。
2、微创手术能够为病人带来诸多利益,但对医生的操作增加了一系列难度,医生必须经过长期训练才能够进行微创手术操作,手术机器人系统能够辅助医生和扩展医生的能力,使手术操作更具灵活性、安全性和可靠性,有助于降低手术风险。
3、微创外科手术机器人属于高新技术密集的高端精密医疗设备,现有微创外科手术机器人在整体结构的布局灵活性,以及术前和术中手术器械规划布置的高效性方面仍存在一些缺陷。
技术实现思路
1、本发明的目的是为克服现有技术的不足,提供了一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,扩大了病人身上手术开孔位置的分布范围,实现了手术器具以最佳的位置和角度快速到达病人手术创口的目标位置,提高了术前和术中手术器械调节的效率和安全性。
2、为实现上述目的,本发明采用下述技术方案:
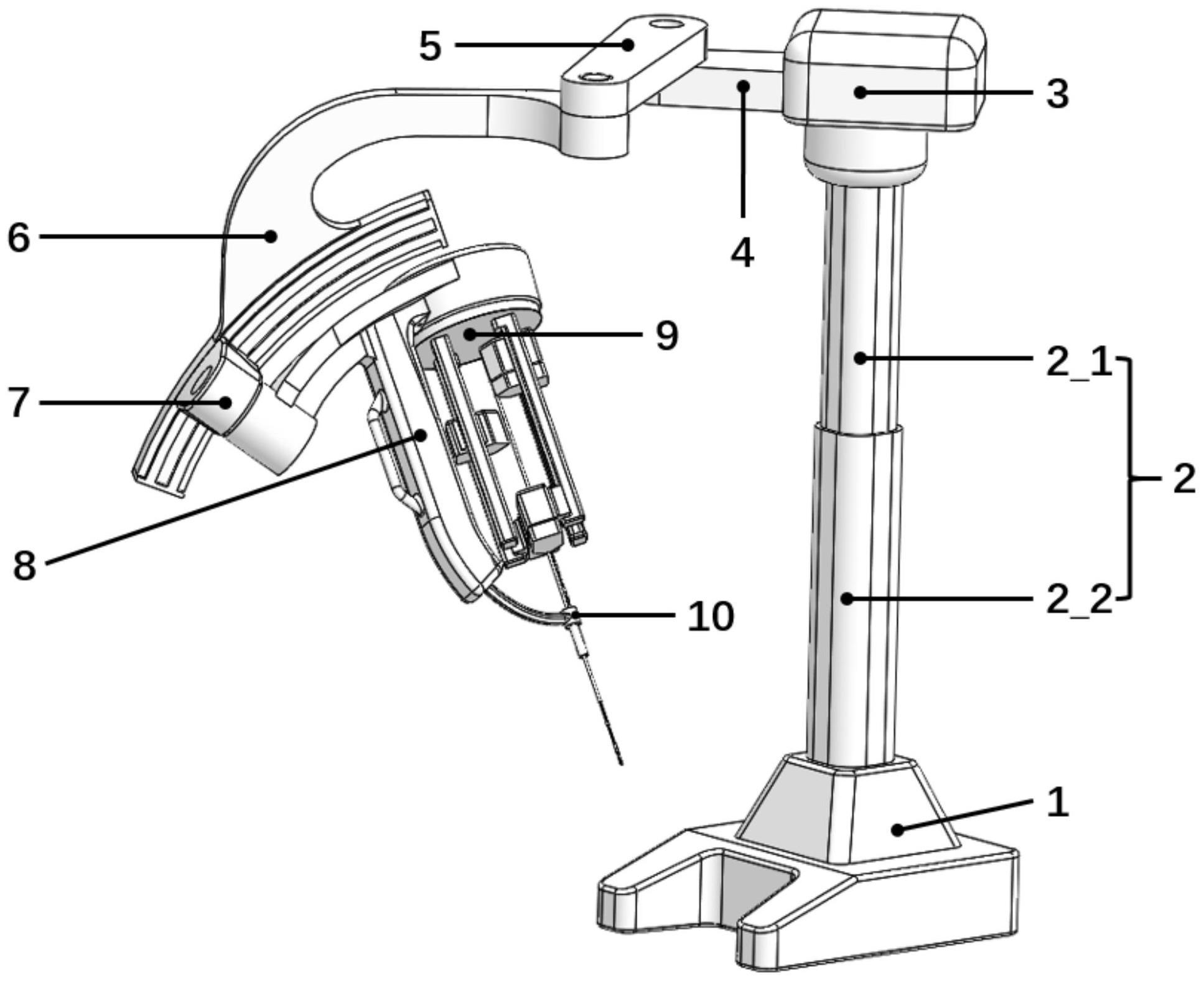
3、本发明公开了一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,包括支撑装置、水平位置调节臂、姿态调节臂、手术执行臂平台、手术执行臂导向管和手术执行臂伸缩模组;水平位置调节臂安装在位于立柱顶端的顶部平台上,姿态调节臂安装于所述水平位置调节臂上;手术执行臂平台和手术执行臂导向管安装在所述姿态调节臂上,手术执行臂伸缩模组安装在手术执行臂平台上;手术执行臂伸缩模组设置多个,每个手术执行臂伸缩模组包括手术执行臂伸缩轨道和手术执行臂驱动盒连接座,所述手术执行臂驱动盒连接座用于安装手术执行臂,并提供手术执行臂动作的驱动力。
4、所述的支撑装置包括底座、立柱和顶部平台;所述立柱的上部可升降端与所述的顶部平台连接,可沿着第一移动关节轴线做垂直升降运动,下部固定端垂直固定于所述的底座上;
5、进一步的,所述的顶部平台可绕着第一旋转关节轴线相对立柱在水平方向做旋转运动。
6、进一步的,所述的水平位置调节臂包括水平位置调节臂ⅰ和水平位置调节臂ⅱ,两者通过第二旋转关节水平连接;所述的水平位置调节臂ⅰ的另一端与所述的顶部平台固定连接。
7、进一步的,所述姿态调节臂包括姿态调节臂ⅰ、姿态调节臂ⅱ和姿态调节臂ⅲ。
8、进一步的,所述姿态调节臂ⅰ通过第三旋转关节与所述水平位置调节臂ⅱ连接,所述第三旋转关节轴线与所述第二旋转关节轴线均为竖直方向。
9、进一步的,所述姿态调节臂ⅰ上第三旋转关节处安装有光束发射装置,光束与所述第三旋转关节轴线重合,由所述第三旋转关节处竖直向下照射,用于术前手术机械臂的布置定位。
10、进一步的,所述的姿态调节臂ⅰ通过一段圆弧轨道与所述的姿态调节臂ⅱ连接,所述的姿态调节臂ⅱ沿着所述姿态调节臂ⅰ上圆弧轨道运动的轨迹呈现为绕第四旋转关节轴线的旋转弧线。
11、进一步的,所述的第四旋转关节轴线与所述的第三旋转关节的轴线垂直相交于一点。
12、进一步的,所述姿态调节臂ⅲ通过第五旋转关节与所述的姿态调节臂ⅱ连接;所述第五旋转关节轴线与所述第四旋转关节轴线垂直相交于一点,并与所述第四旋转关节轴线和所述第三旋转关节轴线的交点重合。
13、进一步的,所述手术执行臂平台通过第六旋转关节与所述姿态调节臂ⅲ连接;所述第六旋转关节轴线与所述第四旋转关节轴线垂直相交于一点,并与所述第四旋转关节轴线和所述第三旋转关节轴线的交点重合。
14、进一步的,第三旋转关节轴线、第四旋转关节轴线、第五旋转关节轴线和第六旋转关节轴线共同相交于一点,三个姿态调节臂的运动始终以该交点为圆心,交点的空间位置取决于顶部平台和水平位置调节臂的位置。
15、进一步的,所述手术执行臂导向管安装于所述姿态调节臂ⅲ的末端,其中轴线与所述第六旋转关节轴线重合。
16、进一步的,多个手术执行臂伸缩模组绕第六旋转关节轴线一圈均布安装在所述手术执行臂平台上。
17、进一步的,所述的手术执行臂驱动盒连接座可沿着所述手术执行臂伸缩轨道直线滑动;所述的手术执行臂驱动盒连接座提供手术执行臂快速安装对接接口和手术执行臂动作驱动力输出接口;所述的手术执行臂驱动盒的布置可使连接好的手术执行臂顺利通过所述手术执行臂导向管。
18、本发明的有益效果:
19、本发明提出的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,手术机器人立柱的升降运动、水平位置调节臂的水平旋转运动供了足够大的运动范围,并可以实现手术执行臂到达创口位置的快速定位,在此基础上调整姿态调节臂可以实现手术执行臂绕着创口位置全方位转动,最终以合适的角度伸入创口,并满足手术过程中手术执行臂绕着创口位置调整而不造成二次伤害;本发明提供了一种高适用性、高灵活性和高稳定性的微创外科手术机器人的机械臂布局结构,且利用该布局结构有助于实现手术器具以最佳的位置和角度伸入手术创口直达病灶,并满足手术过程中的无创伤调整。
技术特征:
1.一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,包括支撑装置、水平位置调节臂、姿态调节臂、手术执行臂平台、手术执行臂导向管和手术执行臂伸缩模组;水平位置调节臂安装在位于立柱顶端的顶部平台上,姿态调节臂安装于所述水平位置调节臂上;手术执行臂平台和手术执行臂导向管安装在所述姿态调节臂上,手术执行臂伸缩模组安装在手术执行臂平台上;手术执行臂伸缩模组为多个,各自包括手术执行臂伸缩轨道和手术执行臂驱动盒连接座,所述的手术执行臂驱动盒连接座可沿着所述手术执行臂伸缩轨道直线滑动;所述手术执行臂驱动盒连接座用于安装手术执行臂,并提供手术执行臂动作的驱动力。
2.如权利要求1所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述的支撑装置包括底座、立柱和顶部平台;所述立柱的上部可升降端与所述的顶部平台连接,可沿着第一移动关节轴线做垂直升降运动,下部固定端垂直固定于所述的底座上;所述的顶部平台可绕着第一旋转关节轴线相对立柱做水平旋转运动。
3.如权利要求1所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述的水平位置调节臂包括水平位置调节臂ⅰ和水平位置调节臂ⅱ,两者通过第二旋转关节水平连接;所述的水平位置调节臂ⅰ的另一端与所述的顶部平台固定连接。
4.如权利要求1所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述姿态调节臂包括姿态调节臂ⅰ、姿态调节臂ⅱ和姿态调节臂ⅲ;所述姿态调节臂ⅰ通过第三旋转关节与所述水平位置调节臂ⅱ连接,所述第三旋转关节轴线与所述第二旋转关节轴线均为竖直方向。
5.如权利要求4所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述姿态调节臂ⅰ上第三旋转关节处安装有光束发射装置,光束与所述第三旋转关节轴线重合,由所述第三旋转关节处竖直向下照射,用于术前手术机械臂的布置定位。
6.如权利要求4所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述的姿态调节臂ⅰ通过一段圆弧轨道与所述的姿态调节臂ⅱ连接,所述的姿态调节臂ⅱ沿着所述姿态调节臂ⅰ上圆弧轨道运动的轨迹呈现为绕第四旋转关节轴线的旋转弧线,所述的第四旋转关节轴线与所述的第三旋转关节的轴线垂直相交于一点。
7.如权利要求6所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述姿态调节臂ⅲ通过第五旋转关节与所述的姿态调节臂ⅱ连接;所述第五旋转关节轴线与所述第四旋转关节轴线垂直相交于一点,并与所述第四旋转关节轴线和所述第三旋转关节轴线的交点重合。
8.如权利要求7所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述手术执行臂平台通过第六旋转关节与所述姿态调节臂ⅲ连接;所述第六旋转关节轴线与所述第四旋转关节轴线垂直相交于一点,并与所述第四旋转关节轴线和所述第三旋转关节轴线的交点重合。
9.如权利要求1所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述手术执行臂导向管安装于所述姿态调节臂ⅲ的末端,其中轴线与所述第六旋转关节轴线重合。
10.如权利要求1所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,多个所述手术执行臂伸缩模组绕第六旋转关节轴线一圈均布安装在所述手术执行臂平台上。
11.如权利要求9所述的一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,其特征在于,所述的手术执行臂驱动盒连接座提供手术执行臂快速安装对接接口和手术执行臂动作驱动力输出接口。
技术总结
本发明公开了一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,包括水平位置调节臂、姿态调节臂、手术执行臂平台、手术执行臂导向管等;水平位置调节臂安装在顶部平台上,姿态调节臂安装于水平位置调节臂上;手术执行臂平台和手术执行臂导向管安装在姿态调节臂上,手术执行臂伸缩模组安装在手术执行臂平台上;手术执行臂伸缩模组包括手术执行臂伸缩轨道和手术执行臂驱动盒连接座,手术执行臂驱动盒连接座用于安装手术执行臂,提供手术执行臂动作的驱动力;通过调整水平位置调节臂和立柱可以实现对手术执行臂伸入创口位置的快速定位;在此基础上调整姿态调节臂可以实现手术器具臂杆绕着创口位置转动,最终以合适的角度伸入创口,到达病灶处。
技术研发人员:胡三元,白儒,张光永,冯红光,田兆辉,孙鹏伟,孙元超
受保护的技术使用者:山东第一医科大学第一附属医院(山东省千佛山医院)
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!