一种心血管外科挂线器
1.本发明涉及心血管外科技术领域,具体为一种心血管外科挂线器。
背景技术:
2.在心血管外科手术中,如心脏瓣膜置换术、心脏缺损补片修补术等手术操作过程中,常采用双头针在心脏位置按顺序进行间断褥式缝合,随之将缝线按照此顺序缝合在人工瓣膜或补片等植入物上,因缝合植入物前需将所有缝合线按照顺序排列,且为了避免妨碍后续缝线的缝合,必须将缝线拉紧、绷直。为了保证缝线的绷直、拉紧,现有的技术多采用手动控制操作钳拉动缝线保持绷直状态,随之再使用剪刀剪断配合操作钳进行缝合,由于手术使用缝线种类多样,不加以仔细辨别梳理易引起缝线使用错误和缝线的缠绕;另一方面,现有技术中的挂线器在使用过程中无法调节挂线器的高度、位置和角度;此外,现有技术中的挂线器缺乏剪线装置;而且,一般简单的剪线装置在剪线过程中容易拉扯缝线,从而会拉扯患者的伤口;因此,急需一种心血管外科挂线器来解决当前问题。
技术实现要素:
3.为解决上述问题,本发明提出了一种心血管外科挂线器,有效解决了现有技术中挂线器缝线容易缠绕、挂线器无法调节和缺乏剪线装置的问题,大大方便了医护人员的操作;大大提高了医护人员缝合的效率和精确度。
4.为实现上述目的,本发明提出了如下技术方案;一种心血管外科挂线器,包括固定架,固定架上螺接有第一定位螺柱,固定架上固接有第一调节柱,第一调节柱内滑动连接有多边形螺套,第一调节柱内转动连接有与多边形螺套相螺接的第一升降螺杆;多边形螺套上固接有第二调节柱,第二调节柱内滑动连接有第一伸缩滑柱,第二调节柱上螺接有与第一伸缩滑柱相配合的第二定位螺柱;第一伸缩滑柱上固接有第三调节柱,第三调节柱上转动连接有第一控制块,第三调节柱内设置有与第一控制块相配合的第一旋转机构;第一控制块上转动连接有多个旋转盖板,第一控制块内设置有多个第二旋转机构;第二旋转机构分别与相对应的旋转盖板相配合;第一控制块内设置有多个与旋转盖板相配合的放置槽;放置槽内均设置有一对第一夹块,第一夹块上均转动连接有旋转限位块,第一控制块内设置有与第一夹块相配合的第一固定机构;第一固定机构和第二旋转机构;第一控制块上设置有与放置槽相配合的通孔;第一控制块内设置有与通孔相配合的定位压块,第一控制块内设置有与定位压块相配合的第一定位机构;第一定位机构与第二旋转机构;第一控制块内设置有与第一定位机构相配合的第一控制机构;第一控制块内设置有与通孔相配合的上切块和下切块,第一控制块内设置有与上切块和下切块相配合的第一剪切机构;第一控制块内设置有与通孔相配合的第一上夹块和第一下夹块,第一控制块内设置有与第一上夹块和第一下夹块相配合的第一夹紧机构;第一夹紧机构和第一剪切机构相连接。
5.进一步地:第一旋转机构包括第三调节柱内转动连接的第一旋转蜗杆,第三调节柱内转动连接有与第一旋转蜗杆相啮合的第一旋转蜗轮,第一旋转蜗轮同轴固接有第二旋
转蜗杆,第三调节柱内转动连接有与第二旋转蜗杆相啮合的第二旋转蜗轮,第二旋转蜗轮两侧均同轴固接有第一旋转齿轮,第三调节柱内转动连接有与第一旋转齿轮相啮合的第二旋转齿轮,第二旋转齿轮均与第一控制块同轴固接。
6.进一步地:第二旋转机构包括与旋转盖板同轴固接的第二复位锥齿轮和第一主动连接锥齿轮;第一控制块内转动连接有与第二复位锥齿轮相啮合的第一复位锥齿轮,第一复位锥齿轮同轴固接有卷簧,第一控制块内转动连接有与第一主动连接锥齿轮相啮合的第一从动连接锥齿轮,第一从动连接锥齿轮同轴固接有第一多连接锥齿轮。
7.进一步地:第一固定机构包括第一控制块内转动连接的第二多连接锥齿轮,第二多连接锥齿轮同轴固接有第一固定蜗杆,第一控制块内转动连接有与第一固定蜗杆相啮合的第一固定蜗轮;第一固定蜗轮同轴固接有第二固定蜗杆,第一控制块内转动连接有多个第二固定蜗轮, 第二固定蜗轮均匀分布在第二固定蜗杆周围,第二固定蜗轮均与第二固定蜗杆相啮合;第二固定蜗轮上均固接有第一固定连杆,第一固定连杆上均转动连接有第二固定连杆,第二固定连杆另一端均与第一夹块转动连接;第一控制块内转动连接有同时与第一多连接锥齿轮和第二多连接锥齿轮相啮合的第三多连接锥齿轮,第三多连接锥齿轮另一端与另一侧第一固定机构相连接。
8.进一步地:第一定位机构包括与第三多连接锥齿轮同轴固接的第一主动连接齿轮,第一控制块内转动连接有与第一主动连接齿轮相啮合的第一从动连接齿轮,第一从动连接齿轮两侧均同轴固接有第二主动连接锥齿轮,第一控制块内转动连接有与第二主动连接锥齿轮相啮合的第二从动连接锥齿轮,第二从动连接锥齿轮同轴固接有第一压紧螺柱,第一控制块内滑动连接有与第一压紧螺柱相螺接的第一压紧螺套,第一压紧螺套分别与定位压块两端转动连接。
9.进一步地:第一控制机构包括定位压块两侧同轴固接的第一压紧齿轮,第一控制块内转动连接有与第一压紧齿轮相啮合的第二压紧齿轮,第一控制块内转动连接有第一连接套柱,第一连接套柱同轴固接有电机;第二压紧齿轮均通过皮带与第一连接套柱相连接。
10.进一步地:第一剪切机构包括第一控制块内转动连接的第一剪切蜗杆,第一控制块内转动连接有与第一剪切蜗杆相啮合的第一剪切蜗轮,第一剪切蜗轮同轴固接有第一半齿轮,第一控制块内转动连接有与第一半齿轮相配合的第一调节齿轮和第二调节齿轮,第一调节齿轮和第二调节齿轮分别位于第一半齿轮两侧呈对称设置;第二调节齿轮同轴固接有第二剪切蜗杆,第一控制块内转动连接有与第二剪切蜗杆相啮合的第二剪切蜗轮;第二剪切蜗轮同轴固接有第一主动连杆,第一主动连杆上转动连接有第一从动连杆和第二从动连杆,第一控制块内滑动连接有上切块,第一从动连杆和第二从动连杆均与上切块转动连接;第一控制块内转动连接有第三从动连杆,第三从动连杆另一端与第二从动连杆转动连接;第一控制块内固接有与上切块相配合的下切块;上切块与下切块相配合部位设置有刀片,下切块上设置有与刀片相配合的刀槽。
11.进一步地:第一夹紧机构包括与第一调节齿轮同轴固接的第一多连接蜗杆,第一控制块内转动连接有一对第一多连接蜗轮,第一多连接蜗轮均与第一多连接蜗杆相啮合,第一多连接蜗轮均同轴固接有第一夹紧螺柱,第一夹紧螺柱间设置有一对第一上夹块,第一上夹块两端分别与相对应的第一夹紧螺柱螺接;两个第一上夹块间相互配合,第一上夹块的运动方向相反。
12.与现有技术相比,本发明的增益效果为:1、本发明构思巧妙,创造性强;第二旋转机构、第一定位机构和第一控制机构的设置,有效实现了对线筒的控制,同时也实现了对缝线的控制。
13.2、本发明功能全面,实用性强,第一夹紧机构和第一剪切机构的设置,大大方便了医护人员的操作,同时也避免了现有技术中剪线装置容易拉扯伤口的问题。
14.3、本发明结构简单,操作方便;第一调节柱、第二调节柱、第三调节柱和第一旋转机构间的配合,大大方便了医护人员的操作;同时也满足了医护人员不同角度的缝合,避免了不同角度缝合时的缝线的拉扯缠绕。
附图说明
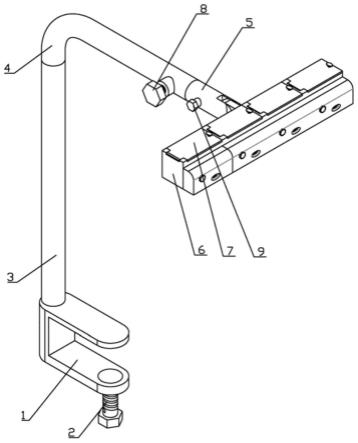
15.图1为本发明立体图。
16.图2为本发明局部剖切图。
17.图3为本发明第一旋转机构立体图。
18.图4为本发明局部立体图。
19.图5为本发明局部立体图。
20.图6为本发明局部剖切图。
21.图7为本发明第一固定机构立体图。
22.图8为本发明第一定位机构立体图。
23.图9为本发明第一固定机构局部放大图。
24.图10为本发明第一控制机构立体图。
25.图11为本发明局部结构立体图。
26.图12为本发明第一夹紧机构立体图。
27.图13为本发明第一剪切机构立体图。
28.图中:1、固定架,2、第一定位螺柱,3、第一调节柱,4、第二调节柱,5、第三调节柱,6、第一控制块,7、旋转盖板,8、第二定位螺柱,9、第一旋转蜗杆,10、第一升降螺杆,11、多边形螺套,12、第一伸缩滑柱,13、第一旋转蜗轮,14、第二旋转蜗杆,15、第二旋转蜗轮,16、第一旋转齿轮,17、第二旋转齿轮,18、第一夹块,19、旋转限位块,20、定位压块,21、卷簧,22、第一复位锥齿轮,23、第二复位锥齿轮,24、第一主动连接锥齿轮,25、第一从动连接锥齿轮,26、第一多连接锥齿轮,27、第二多连接锥齿轮,28、第一固定蜗杆,29、第一固定蜗轮,30、第二固定蜗杆,31、第二固定蜗轮,32、第一固定连杆,33、第二固定连杆,34、第一主动连接齿轮,35、第一从动连接齿轮,36、第二主动连接锥齿轮,37、第二从动连接锥齿轮,38、第一压紧螺柱,39、第一压紧螺套,40、第一压紧齿轮,41、第二压紧齿轮,42、第一连接套柱,43、第一剪切蜗杆,44、第一剪切蜗轮,45、第一半齿轮,46、第一调节齿轮,47、第一多连接蜗杆,48、第一多连接蜗轮,49、第一夹紧螺柱,50、第一上夹块,51、第二调节齿轮,52、第二剪切蜗杆,53、第二剪切蜗轮,54、第一主动连杆,55、第一从动连杆,56、上切块,57、第二从动连杆,58、第三从动连杆,59、下切块,60、第一下夹块,61、第三多连接锥齿轮。
具体实施方式
29.一种心血管外科挂线器,包括固定架1,固定架1上螺接有第一定位螺柱2,固定架1
上固接有第一调节柱3,第一调节柱3内滑动连接有多边形螺套11,第一调节柱3内转动连接有与多边形螺套11相螺接的第一升降螺杆10;多边形螺套11上固接有第二调节柱4,第二调节柱4内滑动连接有第一伸缩滑柱12,第二调节柱4上螺接有与第一伸缩滑柱12相配合的第二定位螺柱8;第一伸缩滑柱12上固接有第三调节柱5,第三调节柱5上转动连接有第一控制块6,第三调节柱5内设置有与第一控制块6相配合的第一旋转机构;第一控制块6上转动连接有多个旋转盖板7,第一控制块6内设置有多个第二旋转机构;第二旋转机构分别与相对应的旋转盖板7相配合;第一控制块6内设置有多个与旋转盖板7相配合的放置槽;放置槽内均设置有一对第一夹块18,第一夹块18上均转动连接有旋转限位块19,第一控制块6内设置有与第一夹块18相配合的第一固定机构;第一固定机构和第二旋转机构;第一控制块6上设置有与放置槽相配合的通孔;第一控制块6内设置有与通孔相配合的定位压块20,第一控制块6内设置有与定位压块20相配合的第一定位机构;第一定位机构与第二旋转机构;第一控制块6内设置有与第一定位机构相配合的第一控制机构;第一控制块6内设置有与通孔相配合的上切块56和下切块59,第一控制块6内设置有与上切块56和下切块59相配合的第一剪切机构;第一控制块6内设置有与通孔相配合的第一上夹块50和第一下夹块60,第一控制块6内设置有与第一上夹块50和第一下夹块60相配合的第一夹紧机构;第一夹紧机构和第一剪切机构相连接。
30.如图1、2、4、5、6、8和11所示:当医护人员操作本发明时;医护人员可先通过第一定位螺柱2将固定架1固定在床上,然后医护人员可通过第一升降螺杆10和多边形螺套11调节第一控制块6的高度;医护人员可通过第一伸缩滑柱12和第二定位螺柱8调节第三调节柱5和第一控制块6的位置;当需要调节第一控制块6角度时,医护人员可通过第一旋转机构进行调节;当需要医护人员安装线筒时,医护人员将旋转盖板7拉开,在此过程中,旋转盖板7转动会带动第二旋转机构、第一定位机构和第一控制机构进行运动,从而实现对线筒和缝线的控制,当医护人员缝合后需要剪断缝线时,医护人员可转动第一剪切蜗杆43,第一剪切蜗杆43转动会先带动第一夹紧机构运动实现对缝线的夹紧,然后带动第一剪切机构实现对缝线的剪断;从而避免了现有技术中剪断线时拉扯伤口的问题;有效解决了现有技术中挂线器缝线容易缠绕、挂线器无法调节和缺乏剪线装置的问题,大大方便了医护人员的操作;大大提高了医护人员缝合的效率和精确度。
31.第一旋转机构包括第三调节柱5内转动连接的第一旋转蜗杆9,第三调节柱5内转动连接有与第一旋转蜗杆9相啮合的第一旋转蜗轮13,第一旋转蜗轮13同轴固接有第二旋转蜗杆14,第三调节柱5内转动连接有与第二旋转蜗杆14相啮合的第二旋转蜗轮15,第二旋转蜗轮15两侧均同轴固接有第一旋转齿轮16,第三调节柱5内转动连接有与第一旋转齿轮16相啮合的第二旋转齿轮17,第二旋转齿轮17均与第一控制块6同轴固接。
32.如图3和4所示:当医护人员转动第一旋转蜗杆9时,第一旋转蜗杆9转动通过第一旋转蜗轮13和第二旋转蜗杆14带动第二旋转蜗轮15进行转动,第二旋转蜗轮15转动通过两侧的第一旋转齿轮16带动相应的第二旋转齿轮17转动;第二旋转齿轮17转动会带动第一控制块6进行转动。
33.第二旋转机构包括与旋转盖板7同轴固接的第二复位锥齿轮23和第一主动连接锥齿轮24;第一控制块6内转动连接有与第二复位锥齿轮23相啮合的第一复位锥齿轮22,第一复位锥齿轮22同轴固接有卷簧21,第一控制块6内转动连接有与第一主动连接锥齿轮24相
啮合的第一从动连接锥齿轮25,第一从动连接锥齿轮25同轴固接有第一多连接锥齿轮26。
34.如图6、7、8和9所示:当医护人员转动旋转盖板7时,旋转盖板7转动会带动第二复位锥齿轮23和第一主动连接锥齿轮24进行转动,第二复位锥齿轮23转动通过第一复位锥齿轮22带动卷簧21进行转动;同时,第一主动连接锥齿轮24转动通过第一从动连接锥齿轮25带动第一多连接锥齿轮26进行转动。
35.第一固定机构包括第一控制块6内转动连接的第二多连接锥齿轮27,第二多连接锥齿轮27与第一多连接锥齿轮26相啮合,第二多连接锥齿轮27同轴固接有第一固定蜗杆28,第一控制块6内转动连接有与第一固定蜗杆28相啮合的第一固定蜗轮29;第一固定蜗轮29同轴固接有第二固定蜗杆30,第一控制块6内转动连接有多个第二固定蜗轮31, 第二固定蜗轮31均匀分布在第二固定蜗杆30周围,第二固定蜗轮31均与第二固定蜗杆30相啮合;第二固定蜗轮31上均固接有第一固定连杆32,第一固定连杆32上均转动连接有第二固定连杆33,第二固定连杆33另一端均与第一夹块18转动连接;第一控制块6内转动连接有同时与第一多连接锥齿轮26和第二多连接锥齿轮27相啮合的第三多连接锥齿轮61,第三多连接锥齿轮61另一端与另一侧第一固定机构相连接。
36.如图7、8和9所示:第一多连接锥齿轮26转动通过第二多连接锥齿轮27和第三多连接锥齿轮61进行转动;第二多连接锥齿轮27转动通过第一固定蜗杆28和第一固定蜗轮29带动第二固定蜗杆30进行转动;第二固定蜗杆30转动带动周围第二固定蜗轮31进行转动,第二固定蜗轮31转动通过第一固定连杆32和第二固定连杆33带动第一夹块18进行滑动;同时第三多连接锥齿轮61也会带动另一侧第一夹块18进行滑动。
37.第一定位机构包括与第三多连接锥齿轮61同轴固接的第一主动连接齿轮34,第一控制块6内转动连接有与第一主动连接齿轮34相啮合的第一从动连接齿轮35,第一从动连接齿轮35两侧均同轴固接有第二主动连接锥齿轮36,第一控制块6内转动连接有与第二主动连接锥齿轮36相啮合的第二从动连接锥齿轮37,第二从动连接锥齿轮37同轴固接有第一压紧螺柱38,第一控制块6内滑动连接有与第一压紧螺柱38相螺接的第一压紧螺套39,第一压紧螺套39分别与定位压块20两端转动连接。
38.如图8和10所示:第三多连接锥齿轮61转动通过第一主动连接齿轮34带动第一从动连接齿轮35进行转动,第一从动连接齿轮35转动会带动两侧第二主动连接锥齿轮36进行转动;第二主动连接锥齿轮36转动通过第二从动连接锥齿轮37带动第一压紧螺柱38进行转动,第一压紧螺柱38转动通过第一压紧螺套39带动定位压块20进行滑动。
39.第一控制机构包括定位压块20两侧同轴固接的第一压紧齿轮40,第一控制块6内转动连接有与第一压紧齿轮40相啮合的第二压紧齿轮41,第一控制块6内转动连接有第一连接套柱42,第一连接套柱42同轴固接有电机;第二压紧齿轮41均通过皮带与第一连接套柱42相连接。
40.如图10所示:当医护人员打开电机时,电机转动通过第一连接套柱42和皮带带动第二压紧齿轮41进行转动,定位压块20滑动过程中可实现第一压紧齿轮40与第二压紧齿轮41相啮合;从而可实现第一压紧齿轮40转动带动定位压块20进行转动。
41.第一剪切机构包括第一控制块6内转动连接的第一剪切蜗杆43,第一控制块6内转动连接有与第一剪切蜗杆43相啮合的第一剪切蜗轮44,第一剪切蜗轮44同轴固接有第一半齿轮45,第一控制块6内转动连接有与第一半齿轮45相配合的第一调节齿轮46和第二调节
齿轮51,第一调节齿轮46和第二调节齿轮51分别位于第一半齿轮45两侧呈对称设置;第二调节齿轮51同轴固接有第二剪切蜗杆52,第一控制块6内转动连接有与第二剪切蜗杆52相啮合的第二剪切蜗轮53;第二剪切蜗轮53同轴固接有第一主动连杆54,第一主动连杆54上转动连接有第一从动连杆55和第二从动连杆57,第一控制块6内滑动连接有上切块56,第一从动连杆55和第二从动连杆57均与上切块56转动连接;第一控制块6内转动连接有第三从动连杆58,第三从动连杆58另一端与第二从动连杆57转动连接;第一控制块6内固接有与上切块56相配合的下切块59;上切块56与下切块59相配合部位设置有刀片,下切块59上设置有与刀片相配合的刀槽;第一夹紧机构包括与第一调节齿轮46同轴固接的第一多连接蜗杆47,第一控制块6内转动连接有一对第一多连接蜗轮48,第一多连接蜗轮48均与第一多连接蜗杆47相啮合,第一多连接蜗轮48均同轴固接有第一夹紧螺柱49,第一夹紧螺柱49间设置有第一上夹块50和第一下夹块60,第一上夹块50和第一下夹块60两端分别与相对应的第一夹紧螺柱49螺接;第一上夹块50和第一下夹块60的滑动方向相反。
42.如图11、12和13所示:当医护人员转动第一剪切蜗杆43时,第一剪切蜗杆43转动通过第一剪切蜗轮44带动第一半齿轮45进行转动,第一半齿轮45转动会先带动第一调节齿轮46进行转动,然后带动第二调节齿轮51进行转动;第一调节齿轮46转动通过第一多连接蜗杆47带动第一多连接蜗轮48进行转动;第一多连接蜗轮48转动通过第一夹紧螺柱49带动第一上夹块50在第一控制块6内进行反向滑动,从而实现对缝线进行固定,然后,第二调节齿轮51转动通过第二剪切蜗杆52带动第二剪切蜗轮53进行转动;第二剪切蜗轮53转动带动第一主动连杆54进行转动;在第三从动连杆58辅助下,第一主动连杆54转动通过第一从动连杆55和第二从动连杆57带动上切块56进行滑动,上切块56滑动过程中与下切块59配合,从而实现将缝线剪断。
43.本发明的工作过程为:如图1、2、4、5、6、8和11所示:当医护人员操作本发明时;医护人员可先通过第一定位螺柱2将固定架1固定在床上,然后医护人员可通过第一升降螺杆10和多边形螺套11调节第一控制块6的高度;医护人员可通过第一伸缩滑柱12和第二定位螺柱8调节第三调节柱5和第一控制块6的位置;当需要调节第一控制块6角度时,医护人员可通过第一旋转机构进行调节;当医护人员转动第一旋转蜗杆9时,第一旋转蜗杆9转动通过第一旋转蜗轮13和第二旋转蜗杆14带动第二旋转蜗轮15进行转动,第二旋转蜗轮15转动通过两侧的第一旋转齿轮16带动相应的第二旋转齿轮17转动;第二旋转齿轮17转动会带动第一控制块6进行转动。
44.当需要医护人员安装线筒时,医护人员将旋转盖板7拉开,在此过程中,旋转盖板7转动会带动第二旋转机构、第一定位机构和第一控制机构进行运动,从而实现对线筒和缝线的控制;在此过程中,当医护人员转动旋转盖板7时,旋转盖板7转动会带动第二复位锥齿轮23和第一主动连接锥齿轮24进行转动,第二复位锥齿轮23转动通过第一复位锥齿轮22带动卷簧21进行转动;同时,第一主动连接锥齿轮24转动通过第一从动连接锥齿轮25带动第一多连接锥齿轮26进行转动;第一多连接锥齿轮26转动通过第二多连接锥齿轮27和第三多连接锥齿轮61进行转动;第二多连接锥齿轮27转动通过第一固定蜗杆28和第一固定蜗轮29带动第二固定蜗杆30进行转动;第二固定蜗杆30转动带动周围第二固定蜗轮31进行转动,第二固定蜗轮31转动通过第一固定连杆32和第二固定连杆33带动第一夹块18进行滑动;同时第三多连接锥齿轮61也会带动另一侧第一夹块18进行滑动;第三多连接锥齿轮61转动通
过第一主动连接齿轮34带动第一从动连接齿轮35进行转动,第一从动连接齿轮35转动会带动两侧第二主动连接锥齿轮36进行转动;第二主动连接锥齿轮36转动通过第二从动连接锥齿轮37带动第一压紧螺柱38进行转动,第一压紧螺柱38转动通过第一压紧螺套39带动定位压块20进行滑动;当医护人员打开电机时,电机转动通过第一连接套柱42和皮带带动第二压紧齿轮41进行转动,定位压块20滑动过程中可实现第一压紧齿轮40与第二压紧齿轮41相啮合;从而可实现第一压紧齿轮40转动带动定位压块20进行转动。
45.当医护人员缝合后需要剪断缝线时,医护人员可转动第一剪切蜗杆43,第一剪切蜗杆43转动会先带动第一夹紧机构运动实现对缝线的夹紧,然后带动第一剪切机构实现对缝线的剪断;从而避免了现有技术中剪断线时拉扯伤口的问题;在此过程中;当医护人员转动第一剪切蜗杆43时,第一剪切蜗杆43转动通过第一剪切蜗轮44带动第一半齿轮45进行转动,第一半齿轮45转动会先带动第一调节齿轮46进行转动,然后带动第二调节齿轮51进行转动;第一调节齿轮46转动通过第一多连接蜗杆47带动第一多连接蜗轮48进行转动;第一多连接蜗轮48转动通过第一夹紧螺柱49带动第一上夹块50在第一控制块6内进行反向滑动,从而实现对缝线进行固定,然后,第二调节齿轮51转动通过第二剪切蜗杆52带动第二剪切蜗轮53进行转动;第二剪切蜗轮53转动带动第一主动连杆54进行转动;在第三从动连杆58辅助下,第一主动连杆54转动通过第一从动连杆55和第二从动连杆57带动上切块56进行滑动,上切块56滑动过程中与下切块59配合,从而实现将缝线剪断;有效解决了现有技术中挂线器缝线容易缠绕、挂线器无法调节和缺乏剪线装置的问题,大大方便了医护人员的操作;大大提高了医护人员缝合的效率和精确度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1