一种可自由旋转的3D腹腔镜装置的制作方法
一种可自由旋转的3d腹腔镜装置
技术领域
1.本发明涉及医疗用具技术领域,尤其涉及一种可自由旋转的3d腹腔镜装置。
背景技术:
2.腹腔镜手术在腹部手术中占据越来越重要的位置,在有些手术中占到95%以上的比例,并成为首选的手术方式。目前,3d腹腔镜设备正逐步取代2d腹腔镜,成为大型医院主要的腹腔镜设备。
3.3d腹腔镜具有更清晰的显像功能、更高的放大比例,并能提供立体影像,因此更能得到外科医生的青睐。2d腹腔镜采用具有斜面的镜头,能够获得偏僻的部位清晰画面。与2d腹腔镜相比,3d腹腔镜不能自由旋转,一旦镜头手柄旋转,其显示的画面会随之旋转或倒转,这是其最明显的缺陷。
4.目前市场上能够旋转的腹腔镜镜头或手柄的品牌包括美国viking和德国storz。前者采用软式镜头,但缺点是旋转角度小,并且镜头容易损坏;后者则只能旋转一个角度,即180
°
。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种可自由旋转的3d腹腔镜装置。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种可自由旋转的3d腹腔镜装置,包括镜头手柄、主机、显示器、重力感应器、角度矫正按钮,所述镜头手柄通过连线与主机连接,所述镜头手柄内部设有的集成芯片,所述集成芯片中安装有重力感应器,所述镜头手柄后部安装有角度校正按钮,所述镜头手柄的前部设有镜头光圈,所述主机内部设有主机芯片,所述主机通过连线与显示器连接。
8.进一步地,所述重力感应器为三轴陀螺仪。
9.进一步地,所述镜头手柄的前部为圆柱体结构,后部为半椭球结构。
10.进一步地,所述镜头光圈为斜面镜头。
11.本发明具有如下有益效果:本装置能自由旋转、能够获得偏僻部位的清晰画面,并能提供立体影像,无死角地暴露手术视野。
附图说明
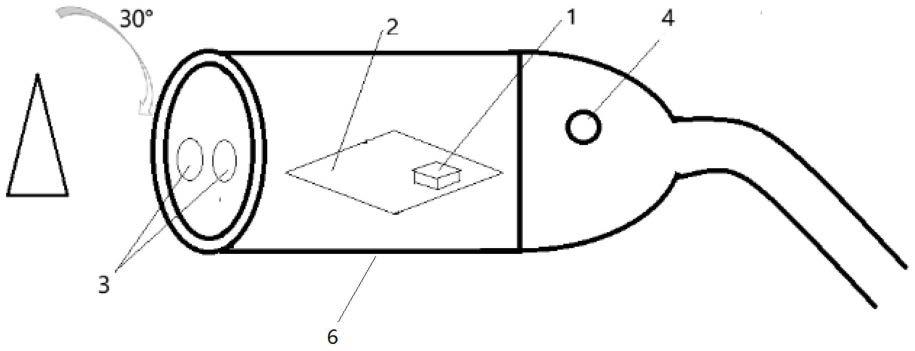
12.图1为本发明的腹腔镜镜头手柄;
13.图2为本发明的腹腔镜主机;
14.图3为本发明的具体实施例示意图。
15.附图标记:
16.1-重力感应器,2-集成芯片,3-镜头光圈,4-角度校正按钮,5-主机芯片,6-镜头手柄,7-主机,8-显示器。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.一种可自由旋转的3d腹腔镜装置,包括镜头手柄6、主机7、显示器8、重力感应器1和角度矫正按钮4,所述镜头手柄6通过连线与主机7连接,所述镜头手柄6内部设有的集成芯片2,所述集成芯片2中安装有重力感应器1,所述镜头手柄6后部安装有角度校正按钮4,所述镜头手柄6的前部设有镜头光圈3,所述主机7内部设有主机芯片5,所述主机7通过连线与显示器8连接。
19.主机芯片型号为sda9400,此sda9400芯片为现有技术,sda9400是一款支持i2c总线协议的y、u、v数字处理电路芯片,其具备行、场输出电路、色度、亮度处理等功能。
20.集成芯片型号为stv6886,此stv6886芯片为现有技术,stv6886是可控弯曲的处理器,该ic控制所有相关的功能在多模的水平和垂直偏转或多频的计算机显示监视器。
21.具体而言,所述重力感应器1为三轴陀螺仪。
22.具体而言,所述镜头手柄6的前部为圆柱体结构,后部为半椭球结构。
23.具体而言,所述镜头光圈3为斜面镜头。
24.参照图1和2,图1和图2介绍了本发明的整体结构,包括镜头手柄6、主机7、重力感应器1和角度矫正按钮4,所述镜头手柄6通过连线与主机7连接,所述镜头手柄6的前部为圆柱体结构,后部为半椭球结构,所述镜头手柄6内部设有的集成芯片2,所述集成芯片2中安装有重力感应器1,所述重力感应器1为三轴陀螺仪,所述镜头手柄6后部安装有角度校正按钮4,所述镜头手柄6的前部设有镜头光圈3,所述主机7内部设有主机芯片5。
25.所述镜头手柄内部安装有重力感应器1,用于动态感知镜头手柄的纵轴旋转角度,内部的集成芯片中安装有角度校正软件,镜头手柄后部安装有角度校正按钮4,用于控制角度校正软件,从而设定镜头手柄的初始角度;主机中设有主机芯片,主机芯片中有安装画面修正软件,用于识别重力感应器1传送的角度信号,并将镜头录制的画面进行相应角度的旋转修正。
26.参见图3,图3介绍了操作的显示界面,手术操作过程中,需不断调整镜头手柄的旋转角度以适应手术操作,手柄沿纵轴逆时针旋转30
°
,重力感应器1利用地球重力场感知镜头手柄的发生旋转,同时识别该角度,利用压电效应转换为电信号,电信号经电源线传送到主机芯片中,其中安装的画面修正软件识别该信号,计算出镜头手柄的纵轴旋转角度,将录制的画面进行顺时针旋转30
°
后,传送到图示3显示器上,从而实现360
°
旋转,无死角地暴露手术视野。
27.工作原理:该设备在使用时,镜头手柄连接普通斜面镜头,先将镜头置于左右水平的位置(沿纵轴旋转0
°
)或术者习惯的位置,通过角度校正按钮4控制角度校正软件,将该初始位置设置为0
°
;手术操作过程中,需不断调整镜头手柄的旋转角度以适应手术操作,手柄沿纵轴逆时针旋转30
°
,重力感应器1利用地球重力场感知镜头手柄的发生旋转,同时识别该角度,利用压电效应转换为电信号,电信号经电源线传送到主机芯片中,其中安装的画面修正软件识别该信号,计算出镜头手柄的纵轴旋转角度,将录制的画面进行顺时针旋转30
°
后,传送到图示3显示器上,从而实现360
°
旋转,无死角地暴露手术视野。
28.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种可自由旋转的3d腹腔镜装置,其特征在于:包括镜头手柄(6)、主机(7)、显示器(8)、重力感应器(1)和角度矫正按钮(4),所述镜头手柄(6)通过连线与主机(7)连接,所述镜头手柄(6)内部设有的集成芯片(2),所述集成芯片(2)中安装有重力感应器(1),所述镜头手柄(6)后部安装有角度校正按钮(4),所述镜头手柄(6)的前部设有镜头光圈(3),所述主机(7)内部设有主机芯片(5),所述主机(7)通过连线与显示器(8)连接。2.根据权利要求1所述的可自由旋转的3d腹腔镜装置,其特征在于:所述重力感应器(1)为三轴陀螺仪。3.根据权利要求1所述的可自由旋转的3d腹腔镜装置,其特征在于:所述镜头手柄(6)的前部为圆柱体结构,后部为半椭球结构。4.根据权利要求1所述的可自由旋转的3d腹腔镜装置,其特征在于:所述镜头光圈(3)为斜面镜头。
技术总结
本发明公开了一种可360
技术研发人员:薛小军 周松 孔丽青
受保护的技术使用者:薛小军
技术研发日:2022.07.12
技术公布日:2022/9/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1