一种被动式假肢手手指的内收外展装置
1.本发明涉及医疗器械技术领域,特别涉及一种被动式假肢手手指的内收外展装置。
背景技术:
2.面对日益增多的手部截肢患者,研发出具有实用性和功能性的假肢手,来最大限度的帮助和改善手部截肢患者的生活质量是迫切的需求。
3.授权号cn213098545u公开了一种基于双输出缠绕绳驱动器的假肢手,包括手臂、手掌、与手掌连接的大拇指、食指、中指、无名指、小指,假肢手还包括用于驱动大拇指、食指、中指、无名指、小指动作的双输出缠绕绳组件。本实用新型结构紧凑体积小,质量轻,便于实现灵巧手或假肢手的小型化设计;由于该驱动器采用的是单电机双输出的驱动方式,使得控制难度大大降低,并可降低控制系统的开发和生产成本;通过调整双输出的绳索的预缠绕的圈数可以实现对手指的刚度的调整,从而将外界冲击载荷作用下手指零部件的损伤降低到最小程度;同时也可以减小假肢手在抓取物体时对物体造成的损伤;由于手指的回复运动不需要弹簧的辅助作用,从而使得手指的最大指尖力得以提升,上述专利文献中的假肢手只能实现真实人手的屈曲伸展运动,不能实现内收外展运动,这使得假肢手的工作空间相对较小,在需要抓取较大物体时无法完成抓取,所述问题在现有的假肢手中普遍存在。
技术实现要素:
4.针对现有技术中存在的不足,本发明提供了一种被动式假肢手手指的内收外展装置,其结构简单,且可以以机械的方式复现人手手指的内收外展运动,使假肢手灵活性更高,抓取工作空间更大。
5.本发明技术方案如下。
6.一种被动式假肢手手指的内收外展装置,包括:内收外展运动驱动机构、内收外展机构、内收外展执行机构以及假肢手手掌,所述内收外展运动驱动机构包括中指第一指节、中指第二指节、中指第三指节;所述内收外展机构包括第一传力杆、传力滑块、第二传力杆、第三传力杆、第四传力杆、第五传力杆、第六传力杆、第七传力杆、第八传力杆;所述内收外展执行机构包括食指内收外展关节、无名指内收外展关节、小指内收外展关节;所述假肢手手掌设有食指内收外展关节连接座、中指连接座、无名指内收外展关节连接座、小指内收外展关节连接座。
7.进一步的改进,所述内收外展运动驱动机构,中指第一指节、中指第二指节、中指第三指节的连接方式为铰链连接,在中指第一指节和中指第二指节的连接处设有中指第一关节滑轮,中指第二指节、中指第三指节的连接处设有中指第二关节滑轮,中指第三指节与中指连接座的连接处设有中指第三关节滑轮,在中指第三指节上设有连接座用于与第一传力杆连接。
8.进一步的改进,所述内收外展机构共设有8根传力连杆,通过第一传力杆、连接座连接内收外展机构和内收外展运动驱动机构,通过第四传力杆、第七传力杆、第八传力杆分别连接食指内收外展关节、无名指内收外展关节、小指内收外展关节。
9.进一步的改进,所述内收外展执行机构,通过食指上连接座、食指下连接轴、无名指上连接座、无名指下连接轴、小指上连接座、小指下连接轴分别与食指第三指节、食指内收外展关节连接座、无名指第三指节、无名指内收外展关节连接座、小指第三指节、小指内收外展关节连接座相连接。
10.进一步的改进,所述内收外展机构中第二传力杆与第五传力杆的杆长为20mm,第四传力杆与第七传力杆的杆长为8.2mm,第八传力杆杆长为25mm,滑块的可滑动距离为0-15.4mm之间。
11.进一步的改进,所述内收外展执行机构,食指内收外展关节、无名指内收外展关节、小指内收外展关节内收外展角度在0
°‑
25.8
°
之间。
12.进一步的改进,所述内收外展运动驱动机构中所设置的指第一关节滑轮、中指第二关节滑轮、中指第三关节滑轮设于整个机构的中轴线位置。
13.本发明的有益效果为。
14.1.本发明可实现假肢手的内收外展运动,内收外展机构采用了连杆机构并集成在手背上,使得假肢手体积小,质量轻,结构紧凑。
15.2.本发明内收外展机构的驱动由中指的运动提供,与中指共用一个驱动器,无需另加去驱动器,使得控制难度降低,成本降低。
16.3.本发明可实现假肢手屈曲伸展运动与内收外展运动的运动耦合,提高了假肢手的灵活性,增大了假肢手的抓握空间,使得假肢手能抓握体积更大的物体。
附图说明
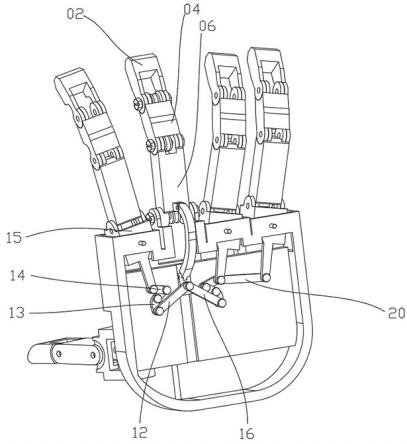
17.图1为本发明整体结构示意图。
18.图2为内收外展运动驱动机构结构示意图。
19.图3为内收外展机构结构示意图。
20.图4为内收外展运动执行机构结构示意图。
21.图5为假肢手手掌结构示意图。
22.图中:02-中指第一指节;03-中指第一关节滑轮;04-中指第二指节;05-中指第二关节滑轮;06-中指第三指节;07-连接座;08-中指第三关节滑轮;10-第一传力杆;11-传力滑块;12-第二传力杆;13-第三传力杆;14-第四传力杆;15-食指内收外展关节;16-第五传力杆;17-第六传力杆;18-第七传力杆;19-无名指内收外展关节;20-第八传力杆;21-小指内收外展关节;22-食指上连接座;23-食指下连接轴;24-无名指上连接座;25-无名指下连接轴;26-小指上连接座;27-小指下连接轴;31-第四传力杆连接座;32-第七传力杆连接座;33-第八传力杆连接座;42-食指内收外展关节连接座;43-中指连接座;44-无名指内收外展关节连接座;45-小指内收外展关节连接座;46-滑槽。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述。
24.实施例1。
25.假肢手手指做伸展运动时,所述内收外展运动驱动机构的中指第一指节(02)、中指第二指节(04)、中指第三指节(06)分别转动,通过连接座(07)将动力传递给内收外展机构的第一传力杆(10),后再通过传力滑块(11)将动力分别传递给第二传力杆(12)与第五传力杆(16),最后传递到第四传力杆(14)与第七传力杆(18),第四传力杆(14)将带动食指内收外展关节(15)做内收外展运动,第七传力杆(18)带动无名指内收外展关节(19)做内收外展运动,同时通过第八传力杆(20)带动小指内收外展关节(21)做内收外展运动。
26.本发明未尽事宜为公知技术。
27.以上所述仅为说明本发明的技术构思以及结构特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据此实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种被动式假肢手手指的内收外展装置,其特征在于,包括:内收外展运动驱动机构、内收外展机构、内收外展执行机构以及假肢手手掌,所述内收外展运动驱动机构包括中指第一指节(02)、中指第二指节(04)、中指第三指节(06);所述内收外展机构,包括第一传力杆(10)、传力滑块(11)、第二传力杆(12)、第三传力杆(13)、第四传力杆(14)、第五传力杆(16)、第六传力杆(17)、第七传力杆(18)、第八传力杆(20);所述内收外展执行机构包括:食指内收外展关节(15)、无名指内收外展关节(19)、小指内收外展关节(21);所述假肢手手掌包括食指内收外展关节连接座(42)、中指连接座(43)、无名指内收外展关节连接座(44)、小指内收外展关节连接座(45)。2.根据权利要求1所述的一种被动式假肢手手指的内收外展装置,其特征在于:所述内收外展运动驱动机构,中指第一指节(02)、中指第二指节(04)、中指第三指节(06)的连接方式为铰链连接,在中指第一指节(02)和中指第二指节(04)的连接处设有中指第一关节滑轮(03),中指第二指节(04)、中指第三指节(06)的连接处设有中指第二关节滑轮(05),中指第三指节(06)与中指连接座(43)的连接处设有中指第三关节滑轮(08),在中指第三指节(06)上设有连接座(07)用于与第一传力杆(10)连接。3.根据权利要求1所述的一种被动式假肢手手指的内收外展装置,其特征在于:所述内收外展机构共设有8根传力连杆,通过第一传力杆(10)、连接座(07)连接内收外展机构和内收外展运动驱动机构,通过第四传力杆(14)、第七传力杆(18)、第八传力杆(20)分别连接食指内收外展关节(15)、无名指内收外展关节(19)、小指内收外展关节(21)。4.根据权利要求1所述的一种被动式假肢手手指的内收外展装置,其特征在于:所述内收外展执行机构,通过食指上连接座(22)、食指下连接轴(23)、无名指上连接座(24)、无名指下连接轴(25)、小指上连接座(26)、小指下连接轴(27)分别与食指第三指节(28)、食指内收外展关节连接座(42)、无名指第三指节(29)、无名指内收外展关节连接座(44)、小指第三指节(30)、小指内收外展关节连接座(45)相连接。5.根据权利要求1所述的一种被动式假肢手手指的内收外展装置,其特征在于:所述内收外展机构中第二传力杆(12)与第五传力杆(16)的杆长为20mm,第四传力杆(14)与第七传力杆(18)的杆长为8.2mm,第八传力杆(20)杆长为25mm,滑块的可滑动距离为0-15.4mm之间。6.根据权利要求1所述的一种被动式假肢手手指的内收外展装置,其特征在于:所述内收外展执行机构,食指内收外展关节(15)、无名指内收外展关节(19)、小指内收外展关节(21)内收外展角度在0
°‑
25.8
°
之间。7.根据权利要求2所述的一种被动式假肢手手指的内收外展装置,其特征在于:所述内收外展运动驱动机构中所设置的指第一关节滑轮(03)、中指第二关节滑轮(05)、中指第三关节滑轮(08)设于整个机构的中轴线位置。
技术总结
本发明特别涉及一种被动式假肢手手指的内收外展装置,包括内收外展运动驱动机构、内收外展机构、内收外展执行机构以及假肢手手掌;与现有技术相比,本发明结构简单,能以机械的方式复现人手手指的内收外展运动,使假肢手灵活性更高,抓取工作空间更大,通过屈曲伸展运动与内收外展运动的耦合,使得本发明中的假肢手能更好的完成对大体积物体的抓取。肢手能更好的完成对大体积物体的抓取。肢手能更好的完成对大体积物体的抓取。
技术研发人员:翟建华 徐启明 汪逸超
受保护的技术使用者:辽宁工程技术大学
技术研发日:2022.07.13
技术公布日:2022/9/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1