用于如机器人手术系统中使用的手术器械的端部执行器驱动机构的制作方法
本公开涉及手术器械,并且更具体地说,涉及用于如机器人手术系统中使用的手术器械的端部执行器驱动机构。
背景技术:
1、机器人手术系统越来越多地用于各种不同的手术过程中。一些机器人手术系统包括支撑机器人臂的控制台。一个或多个不同的手术器械可被配置成用于与机器人手术系统一起使用,且可选择性地安装到机器人臂。机器人臂提供到所安装的手术器械的一个或多个输入,以使得能够操作所安装的手术器械。
2、手术钳是一种能够与机器人手术系统一起使用的器械,依靠其钳口构件之间的机械作用来抓取、夹紧和收缩组织。电外科钳利用机械夹紧作用和能量来加热组织以治疗例如凝结、烧灼或密封组织。通常,一旦组织被治疗,就使用切割元件切断组织。因此,电外科钳被设计成并入切割元件以有效地切断治疗的组织。可替代地,可实施基于能量,例如热、电、超声等的切割机构。
3、使用传统的手术仪器,例如开放式和内窥镜手术仪器,外科医生典型地能够感觉或以其他方式感知来自端部执行器的直接反馈,所述反馈与钳口构件之间的组织大小以及在操纵和密封期间施加的力有关。使用机器人仪器,触觉反馈可丢失或牺牲,以便于使用以抵消手术疲劳等。
技术实现思路
1、如本文中所使用,术语“远侧”是指所描述的离操作员(无论是人类外科医生还是手术机器人)较远的部分,而术语“近侧”是指所描述的较接近操作员的部分。如本文所用,术语“约”、基本上”等旨在说明制造、材料、环境、使用和/或测量公差和变化,并且在任何情况下可涵盖高达10%的差异。此外,在一致的程度上,本文所描述的任何方面可与本文所描述的任何或所有其他方面结合使用。
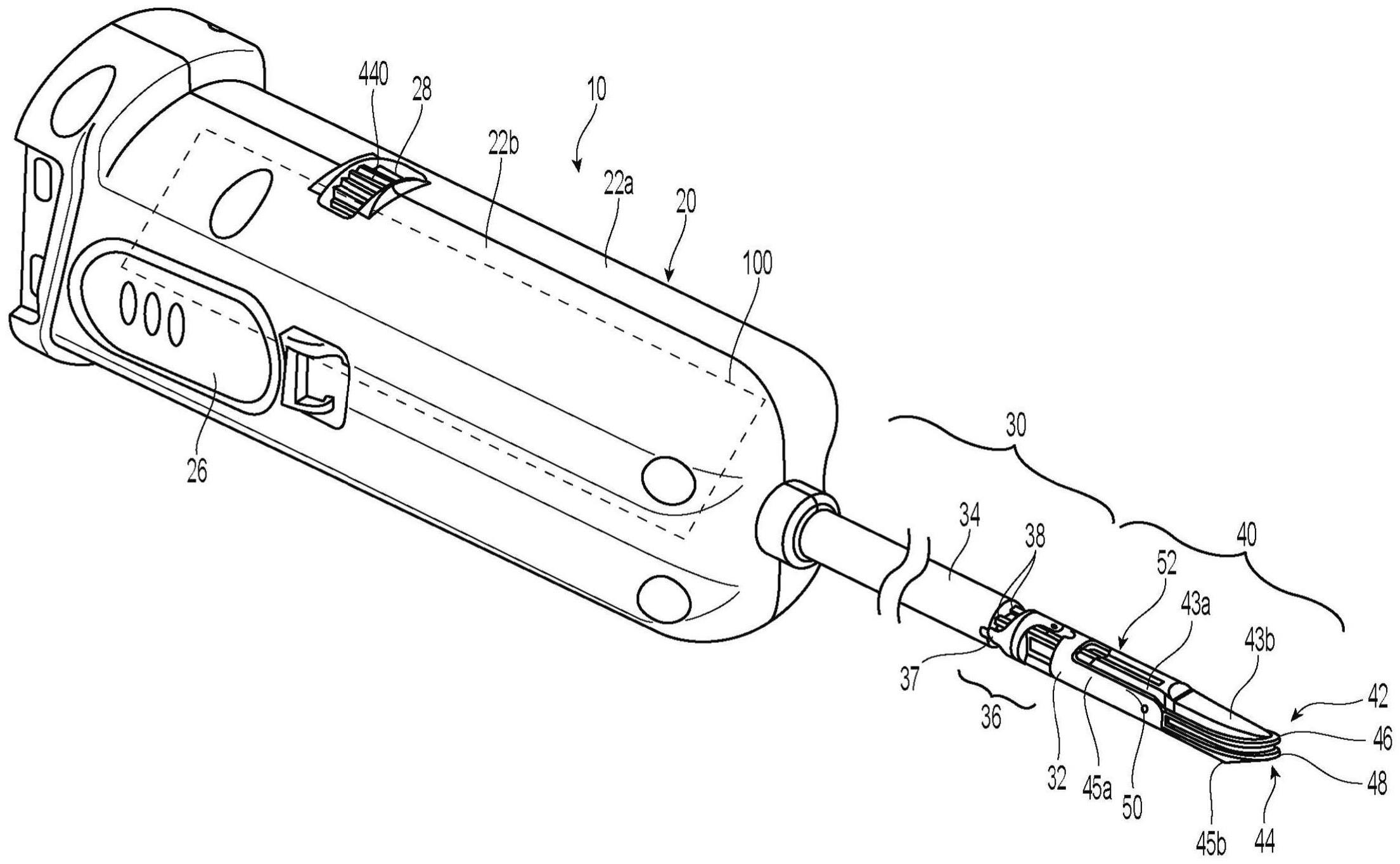
2、根据本公开的多个方面,提供一种机器人手术系统,其包括电外科器械,所述电外科器械包括器械壳体,所述器械壳体具有从其延伸的轴。端部执行器组合件设置在轴的远端处并且包括第一和第二钳口构件,所述第一和第二钳口构件可在其中钳口构件中的一个或两个相对于钳口构件中的另一个间隔开的第一位置和其中第一和第二钳口构件协作以抓取组织的第二位置之间移动。输入端可操作地联接到器械壳体并且被配置成在第一和第二位置之间移动钳口构件。一个或多个手柄相对于器械壳体远程设置并且被配置成与输入端通信以用于控制钳口构件。手柄包括壳体,其具有可操作地联接到其上的杠杆,杠杆继而被配置成与输入端协作以相对于杠杆的移动来控制钳口构件的移动。杠杆可在其中杠杆相对于壳体间隔开并且相关钳口构件设置在第一位置中的归位位置和其中杠杆更靠近壳体并且相关钳口构件围绕组织闭合的抓取位置之间移动,其中钳口构件之间的压力在约0.1kg/cm2至约2kg/cm2范围内。杠杆还可在抓取位置和密封位置之间移动,在密封位置中,杠杆更靠近壳体并且相关钳口构件围绕组织闭合,其中钳口构件之间的压力在约3kg/cm2至约16kg/cm2范围内以用于在激活电外科能量时密封钳口构件之间的组织。
3、在根据本公开的多个方面,一个手柄的壳体包括限定在其中的腔,所述腔被配置成在其中容纳一个或多个部件,所述一个或多个部件被配置成可操作地连接到输入端,使得杠杆相对于壳体的移动与钳口构件在第一和第二位置之间的移动相关。
4、在根据本公开的多个方面,杠杆和钳口构件的移动的相关性为线性的。在根据本公开的其它方面,杠杆和钳口构件的移动的相关性为非线性的。
5、在根据本公开的多个方面,设置在腔中的部件组合将杠杆的致动力与钳口构件之间的施加的闭合压力相关,其中组织接合在所述钳口构件之间。在根据本公开的多个方面,设置在腔中的部件组合包括杠杆、齿轮、连杆和弹簧。
6、根据本公开的多个方面,提供一种机器人手术系统,其包括电外科器械,所述电外科器械包括器械壳体,所述器械壳体具有从其延伸的轴。端部执行器组合件设置在轴的远端处并且包括第一和第二钳口构件,所述第一和第二钳口构件可在其中钳口构件中的一个或两个相对于钳口构件中的另一个间隔开的第一位置和其中第一和第二钳口构件协作以抓取组织的第二位置之间移动。输入端可操作地联接到器械壳体并且被配置成在第一和第二位置之间移动钳口构件。一个或多个手柄相对于器械壳体远程设置并且被配置成与输入端通信以用于控制钳口构件。手柄包括壳体,其具有可操作地联接到其上的杠杆。杠杆在其移动时与输入端协作以使钳口构件在第一和第二位置之间移动,其中杠杆从未致动位置到第一位置的初始移动使钳口构件以在约0.1kg/cm2至约2kg/cm2范围内的闭合压力移动,并且其中杠杆超过第一位置的后续移动使钳口构件以在约3kg/cm2至约16kg/cm2范围内的闭合压力移动。
7、在根据本公开的多个方面,手柄的壳体包括限定在其中的腔,所述腔被配置成在其中容纳一个或多个部件,所述一个或多个部件被配置成可操作地连接到输入端,使得杠杆相对于壳体的移动与钳口构件在第一和第二位置之间的移动相关。
8、在根据本公开的多个方面,杠杆和钳口构件的移动的相关性为线性的。在根据本公开的其它方面,杠杆和钳口构件的移动的相关性为非线性的。
9、在根据本公开的多个方面,设置在腔中的部件组合将杠杆的致动力与钳口构件之间的施加的压力相关,其中组织接合在所述钳口构件之间。在根据本公开的其它方面,设置在腔中的部件组合包括杠杆、齿轮、连杆和弹簧。
10、在根据本公开的多个方面,系统另外包括可操作地与杠杆相关联的触觉、视觉和/或听觉指示器,其被配置成在杠杆移动超过第一位置时警告用户。
11、根据本公开的多个方面,提供一种机器人手术系统,其包括电外科器械,所述电外科器械包括器械壳体,所述器械壳体具有从其延伸的轴。端部执行器组合件设置在轴的远端处并且包括第一和第二钳口构件,所述第一和第二钳口构件可在其中钳口构件中的一个或两个相对于钳口构件中的另一个间隔开的第一位置和其中第一和第二钳口构件协作以抓取组织的第二位置之间移动。输入端可操作地联接到器械壳体并且被配置成在第一和第二位置之间移动钳口构件。一个或多个手柄相对于器械壳体远程设置并且被配置成与输入端通信以用于控制钳口构件。手柄包括:壳体,其具有可操作地联接到其上的杠杆;和开关,其可操作地设置在杠杆或壳体中的一个或两个上。开关可在其中杠杆在其移动时与输入端协作以使钳口构件在第一和第二位置之间以在约0.1kg/cm2至约2kg/cm2范围内的闭合压力移动的第一位置和其中杠杆的移动使钳口构件以在约3kg/cm2至约16kg/cm2范围内的闭合压力移动的第二位置之间移动。
12、在根据本公开的多个方面,开关向第二位置的移动将钳口构件配置成用于电外科激活。在根据本公开的其它方面,当开关设置在第一位置时,电外科能量被停用。
13、在根据本公开的多个方面,系统另外包括钳口构件之间的闭合压力的触觉、视觉和/或听觉指示器。
技术特征:
1.一种机器人手术系统,其包含:
2.根据权利要求1所述的机器人手术系统,其中所述至少一个手柄的所述壳体包括限定在其中的腔,所述腔被配置成在其中容纳一个或多个部件,所述一个或多个部件被配置成可操作地连接到所述输入端,使得所述杠杆相对于所述壳体的移动与所述钳口构件在所述第一和第二位置之间的移动相关。
3.根据权利要求2所述的机器人手术系统,其中所述杠杆和所述钳口构件的移动的相关性为线性的。
4.根据权利要求2所述的机器人手术系统,其中所述杠杆和所述钳口构件的移动的相关性为非线性的。
5.根据权利要求2所述的机器人手术系统,其中设置在所述腔中的部件组合将所述杠杆的致动力与所述钳口构件之间的施加的闭合压力相关,其中组织接合在所述钳口构件之间。
6.根据权利要求5所述的机器人手术系统,其中设置在所述腔中的部件组合包括杠杆、齿轮、连杆和弹簧。
7.一种机器人手术系统,其包含:
8.根据权利要求7所述的机器人手术系统,其中所述至少一个手柄的所述壳体包括限定在其中的腔,所述腔被配置成在其中容纳一个或多个部件,所述一个或多个部件被配置成可操作地连接到所述输入端,使得所述杠杆相对于所述壳体的移动与所述钳口构件在所述第一和第二位置之间的移动相关。
9.根据权利要求8所述的机器人手术系统,其中所述杠杆和所述钳口构件的移动的相关性为线性的。
10.根据权利要求8所述的机器人手术系统,其中所述杠杆和所述钳口构件的移动的相关性为非线性的。
11.根据权利要求8所述的机器人手术系统,其中设置在所述腔中的部件组合将所述杠杆的致动力与所述钳口构件之间的施加的压力相关,其中组织接合在所述钳口构件之间。
12.根据权利要求11所述的机器人手术系统,其中设置在所述腔中的部件组合包括杠杆、齿轮、连杆和弹簧。
13.根据权利要求7所述的机器人手术系统,其另外包含可操作地与所述杠杆相关联的触觉、视觉或听觉指示器中的至少一个,所述指示器被配置成在所述杠杆移动超过所述第一位置时警告用户。
14.一种机器人手术系统,其包含:
15.根据权利要求14所述的机器人手术系统,其中所述开关向所述第二位置的移动将所述钳口构件配置成用于电外科激活。
16.根据权利要求14所述的机器人手术系统,其中当所述开关设置在所述第一位置时,电外科能量被停用。
17.根据权利要求14所述的机器人手术系统,其另外包含所述钳口构件之间的所述闭合压力的触觉、视觉或听觉指示器中的至少一个。
技术总结
一种机器人系统包括电外科器械,所述电外科器械具有带有轴的器械壳体,所述轴带有端部执行器组合件,以及附接到其上的可移动以抓取组织的第一和第二钳口构件。输入端可操作地联接到所述器械壳体并且被配置成移动所述钳口构件。手柄相对于所述器械壳体远程设置并且被配置成与所述输入端通信以用于控制所述钳口构件,所述手柄具有杠杆,所述杠杆被配置成与所述输入端协作以相对于所述杠杆的移动来控制所述钳口构件。所述杠杆在归位位置和与所述钳口构件相关的第一位置之间移动,所述钳口构件以其间的在约0.1kg/cm<supgt;2</supgt;至约2kg/cm<supgt;2</supgt;范围内的压力闭合。所述杠杆另外可移动到与所述钳口构件相关的密封位置,所述钳口构件以在约3kg/cm<supgt;2</supgt;至约16kg/cm<supgt;2</supgt;之间的压力围绕组织闭合以用于密封。
技术研发人员:C·T·楚迪,D·R·金斯利,S·A·马朗,J·H·博德默,T·G·莫厄,A·W·泽科拉,C·M·西贝纳勒,H·P·阿波斯托洛普洛斯,R·W·霍尔布鲁克,W·R·惠特尼,J·G·韦伊,Z·S·海利格
受保护的技术使用者:柯惠有限合伙公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!