远心机构以及装配有该远心机构的手术机器人的制作方法
本发明涉及医疗器械,特别是涉及远心机构以及装配有该远心机构的手术机器人。
背景技术:
1、目前,腹腔微创手术机器人在现代医疗手术中得到越来越广泛的应用。微创手术机器人的执行机构为远心机构,主要功能为扶持内窥镜或手术器械围绕特定的点作旋转和直线运动,以实现对病灶的实时观察和各种手术操作。其中,远心机构旋转所围绕的特定点称之为远心点,位于手术患者腹腔开口处。在实际操作中,如果远心点跳动过大,均会出现拉扯病人伤口的情况,对患者手术安全造成影响。
2、因此,远心机构的稳定对微创手术操作来讲极为重要。现有技术中使用的远心机构具有冗余自由度,导致整个远心机构占用空间较大,影响使用过程中的刚度和稳定性。
技术实现思路
1、基于此,有必要提供一种远心机构,以缩减整体机构的占用空间,提高远心机构的刚度和稳定性。
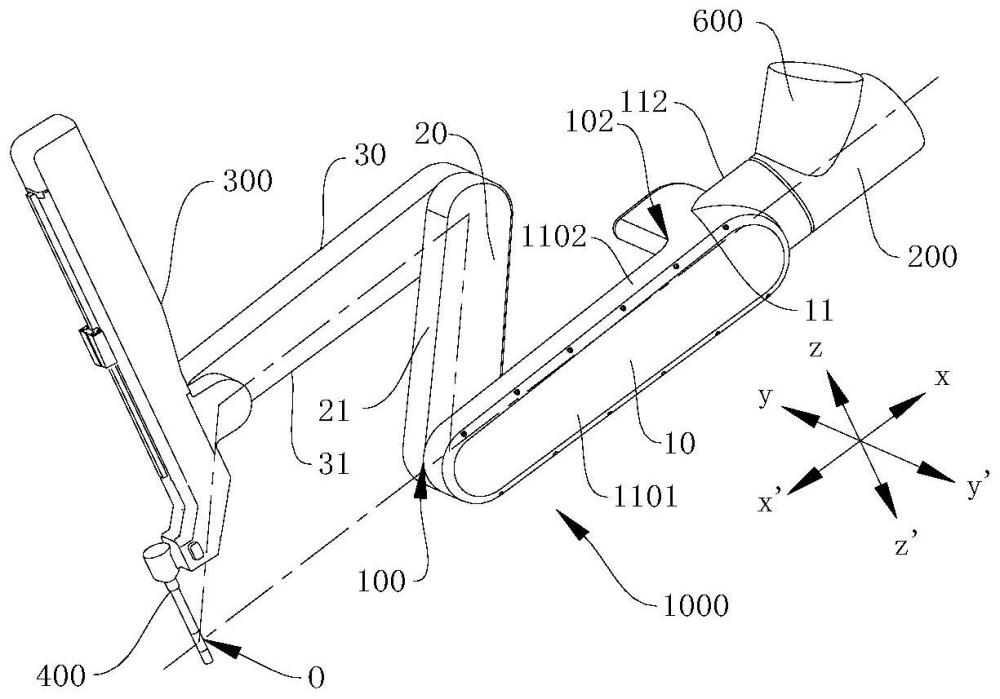
2、一种远心机构,包括俯仰部件;所述俯仰部件包括第一连杆臂组件、第二连杆臂组件、第三连杆臂组件和俯仰驱动组件;所述第一连杆臂组件的一端安装有所述俯仰驱动组件,另一端与所述第二连杆臂组件的一端连接,所述俯仰驱动组件与所述第二连杆臂组件的一端传动连接;所述第二连杆臂组件与所述第三连杆臂组件连接。上述的远心机构,通过将俯仰驱动组件和第二连杆臂组件分别位于第一连杆臂组件的两端,使得俯仰驱动组件位于整个远心机构的前端,满足驱动前置。如此,降低了整个远心机构朝向末端的重量和惯性,以便整个远心机构的反馈更为灵敏。同时,这样的设置,缩减了整个俯仰驱动组件所占用的空间,进而缩减整个远心机构占用空间。
3、在其中一个实施例中,所述第二连杆臂组件的另一端与所述第三连杆臂组件的一端连接,所述第三连杆臂组件与所述第一连杆臂组件平行设置;所述第二连杆臂组件和/或所述第三连杆臂组件在非工作状态下能够折叠于所述第一连杆臂组件连接所述俯仰驱动组件的一侧。
4、在其中一个实施例中,所述第一连杆臂组件构造有第一安装腔,所述第一安装腔内设置有第一隔板,所述第一隔板将所述第一安装腔分隔成开口相反设置的两个第一子腔体;所述第三连杆臂组件构造有第三安装腔,所述第三安装腔内设置有第三隔板,所述第三隔板将所述第三安装腔分隔成开口相反设置的两个第三子腔体。
5、在其中一个实施例中,所述远心机构还包括平移部件;所述第三连杆臂组件位于所述第二连杆臂组件背离所述第一连杆臂组件的一侧,所述第三连杆臂组件朝向所述第二连杆臂组件的一侧用于安装所述平移部件。
6、在其中一个实施例中,所述第一连杆臂组件包括第一传动轮、第二传动轮以及第一传动带组,所述第一传动轮传动连接于所述俯仰驱动组件的俯仰驱动轴,所述第一传动带组张紧于所述第一传动轮和所述第二传动轮之间,所述第二传动轮连接于所述第二连杆臂组件,所述第二传动轮带动所述第二连杆臂组件相对所述第一连杆臂组件摆动。
7、在其中一个实施例中,所述第二连杆臂组件包括第二臂体壳,所述第二臂体壳与所述第二传动轮固接。
8、在其中一个实施例中,所述第二连杆臂组件还包括第三传动轮、第四传动轮和第二传动带组,三者均安装于所述第二臂体壳内;所述第三传动轮与所述第二传动轮同轴装配并能够相对所述第二臂体壳绕自身轴线转动,所述第二传动带组张紧于所述第三传动轮和所述第四传动轮之间,所述第四传动轮连接于所述第三连杆臂组件;所述第二传动带组被配置为响应于所述第二臂体壳的摆动而驱动所述第四传动轮转动。
9、在其中一个实施例中,所述第三连杆臂组件包括第三臂体壳,所述第三臂体壳与所述第四传动轮固接。
10、在其中一个实施例中,所述第三连杆臂组件包括第五传动轮、第六传动轮和第三传动带组,三者均安装于所述第三臂体壳内;所述第五传动轮与所述第四传动轮同轴装配并能够相对所述第三臂体壳绕自身轴线转动,所述第三传动带组张紧于所述第五传动轮与所述第六传动轮之间,所述第六传动轮用于连接于所述远心机构的平移部件;所述第三传动带组被配置为响应于所述第三臂体壳的摆动而驱动所述第六传动轮转动。
11、在其中一个实施例中,所述第一传动轮、所述第三传动轮以及所述第五传动轮均包括轮体一和轮体二,所述轮体一和所述轮体二沿所述俯仰驱动组件的俯仰驱动轴的轴向布置,二者可拆卸连接;所述第一传动带组、所述第二传动带组和所述第三传动带组均包括传动带一和传动带二;所述传动带一的两端分别固定连接于所述轮体一和对应的传动轮,所述传动带二的两端分别固定连接于轮体二和对应的传动轮。
12、在其中一个实施例中,所述远心机构还包括连接于所述轮体一和所述轮体二的张紧机构,所述张紧机构被配置为响应于外力作用驱使所述轮体一与所述轮体二相对转动,以张紧对应的传动带。
13、在其中一个实施例中,所述张紧机构包括预紧柱、凸起部和避让部,所述凸起部和所述避让部其中一者设置于所述轮体一,其中另一者设置于所述轮体二,所述预紧柱的一端穿过所述凸起部并抵持于所述避让部;所述预紧柱与所述凸起部螺纹旋接;所述预紧柱能够相对所述凸起部绕自身轴线转动,以驱动所述轮体一和所述轮体二沿相反方向转动。
14、在其中一个实施例中,所述远心机构还包括偏转部件;所述第一连杆臂组件朝向所述俯仰驱动组件的一端延伸有连接座,所述连接座与所述偏转部件的偏转驱动轴传动连接;所述偏转部件能够通过所述第一连杆臂组件带动所述远心机构的远心戳卡相对远心点绕所述偏转驱动轴的轴线转动。
15、本发明还提供一种包括上述远心机构的手术机器人,在满足实际操作的同时,缩减占用空间,并具有较高的刚度和稳定性。
技术特征:
1.一种远心机构,其特征在于,所述远心机构(1000)包括俯仰部件(100);
2.根据权利要求1所述的远心机构,其特征在于,所述第二连杆臂组件(20)的另一端与所述第三连杆臂组件(30)的一端连接,所述第三连杆臂组件(30)与所述第一连杆臂组件(10)平行设置;
3.根据权利要求1或2所述的远心机构,其特征在于,所述第一连杆臂组件(10)构造有第一安装腔(101),所述第一安装腔(101)内设置有第一隔板(111),所述第一隔板(111)将所述第一安装腔(101)分隔成开口相反设置的两个第一子腔体;
4.根据权利要求3所述的远心机构,其特征在于,所述远心机构(1000)还包括平移部件(300);
5.根据权利要求1或2所述的远心机构,其特征在于,所述第一连杆臂组件(10)包括第一传动轮(12)、第二传动轮(13)以及第一传动带组(14),所述第一传动轮(12)传动连接于所述俯仰驱动组件(40)的俯仰驱动轴(42),所述第一传动带组(14)张紧于所述第一传动轮(12)和所述第二传动轮(13)之间,所述第二传动轮(13)连接于所述第二连杆臂组件(20),所述第二传动轮(13)带动所述第二连杆臂组件(20)相对所述第一连杆臂组件(10)摆动。
6.根据权利要求5所述的远心机构,其特征在于,所述第二连杆臂组件(20)包括第二臂体壳(21),所述第二臂体壳(21)与所述第二传动轮(13)固接。
7.根据权利要求6所述的远心机构,其特征在于,所述第二连杆臂组件(20)还包括第三传动轮(22)、第四传动轮(23)和第二传动带组(24),三者均安装于所述第二臂体壳(21)内;
8.根据权利要求7所述的远心机构,其特征在于,所述第三连杆臂组件(30)包括第三臂体壳(31),所述第三臂体壳(31)与所述第四传动轮(23)固接。
9.根据权利要求8所述的远心机构,其特征在于,所述第三连杆臂组件(30)包括第五传动轮(32)、第六传动轮(33)和第三传动带组(34),三者均安装于所述第三臂体壳(31)内;
10.根据权利要求9所述的远心机构,其特征在于,所述第一传动轮(12)、所述第三传动轮(22)以及所述第五传动轮(32)均包括轮体一和轮体二,所述轮体一和所述轮体二沿所述俯仰驱动组件(40)的俯仰驱动轴(42)的轴向布置,二者可拆卸连接;
11.根据权利要求10所述的远心机构,其特征在于,所述远心机构(1000)还包括连接于所述轮体一和所述轮体二的张紧机构(60),所述张紧机构(60)被配置为响应于外力作用驱使所述轮体一与所述轮体二相对转动,以张紧对应的传动带。
12.根据权利要求11所述的远心机构,其特征在于,所述张紧机构(60)包括预紧柱(61)、凸起部(62)和避让部(63),所述凸起部(62)和所述避让部(63)其中一者设置于所述轮体一,其中另一者设置于所述轮体二,所述预紧柱(61)的一端穿过所述凸起部(62)并抵持于所述避让部(63);
13.根据权利要求1所述的远心机构,其特征在于,所述远心机构(1000)还包括偏转部件(200);
14.一种手术机器人,其特征在于,包括权利要求1至13中任一项所述的远心机构。
技术总结
本发明涉及医疗器械技术领域,提供了一种远心机构以及装配有该远心机构的手术机器人。该远心机构包括俯仰部件;俯仰部件包括第一连杆臂组件、第二连杆臂组件、第三连杆臂组件和俯仰驱动组件;第一连杆臂组件的一端安装有俯仰驱动组件,另一端与第二连杆臂组件的一端连接,且俯仰驱动组件与第二连杆臂组件的一端传动连接;第二连杆臂组件与第三连杆臂组件连接。本发明提供的远心机构降低了整个远心机构朝向末端的重量和惯性,并缩减整个远心机构占用空间,以便整个远心机构的反馈更为灵敏。
技术研发人员:袁城
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!