外科器械的制作方法
本发明涉及医疗器械,特别是涉及一种外科器械。
背景技术:
1、外科切割吻合器是医学上常用的一种替代手工缝合的器械,其工作原理是通过在手术部位定位的穿刺器的套管进入患者体内,继而在组织中制造纵向切口和在切口的相对侧施加吻合钉,从而对组织进行离断和吻合。
2、现有的外科切割吻合器包括钳口组件转向件、驱动组件和拉杆组件,转向件连接钳口组件,能够带动钳口组件转动。驱动组件能够驱动拉杆组件运动,拉杆组件连接转向件,使拉杆组件的运动可以带动转向件转动,进而驱动钳口组件转动,完成钳口组件的转向。为了节省钳口驱动装置的体积,现有技术采用了拉杆组件仅连接转向件一侧的方案,通过拉杆组件带动转向件单侧转动进而带动钳口组件转动,但在完成钳口组件的转向后,钳口组件需保持其转动后的角度状态,但单侧连接件的拉杆组件定位转向件的能力较差,容易出现钳口组件转动后的角度不稳定,产生角度偏移的问题。
技术实现思路
1、针对现有技术的不足,本发明旨在提供一种外科器械,解决了钳口组件角度不稳定,发生角度偏移的问题。
2、本发明通过以下技术方案实现:
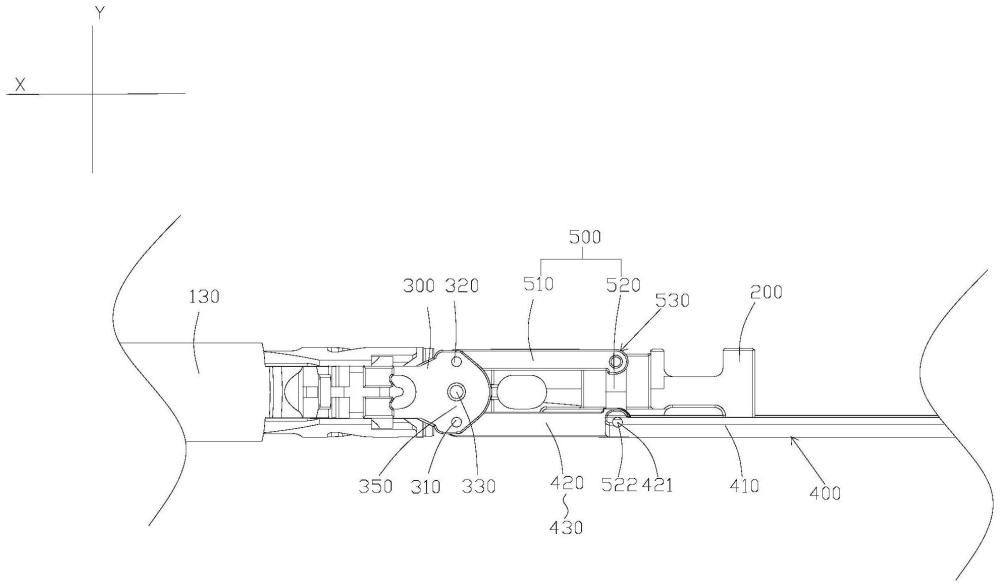
3、一种外科器械,包括:钳口组件;手柄;座体,座体与手柄连接;转向件,转向件的近端与座体可枢转地连接,转向件的远端连接钳口组件;驱动组件,设置于手柄内;拉杆组件,拉杆组件的远端可转动地连接于转向件的第一铰接点,拉杆组件的近端可转动地连接驱动组件,响应于驱动组件的驱动,拉杆组件运动以驱动转向件转动,进而使得钳口组件转动;连杆组件,连杆组件的远端可转动地连接于转向件的第二铰接点,连杆组件的近端可转动地连接于拉杆组件的第三铰接点;第一铰接点位于转向件枢转中心的一侧,第二铰接点位于转向件枢转中心的另一侧,转向件包括位于第一铰接点与第二铰接点之间的连接部,拉杆组件包括位于第一铰接点与第三铰接点之间的杆体部;杆体部、连接部和连杆组件围成一定位框架;定位部,定位部对定位框架进行定位,进而定位转向件。
4、进一步的,拉杆组件包括拉杆和第一连杆,第一连杆的远端可转动地连接于转向件的第一铰接点,近端可转动地连接于拉杆远端的第四铰接点,拉杆的近端连接驱动组件,响应于驱动组件的驱动,拉杆运动以带动第一连杆运动驱动转向件转动,进而使得钳口组件转动;杆体部包括第一连杆、和拉杆位于第四铰接点与第三铰接点之间的部分。
5、进一步的,第三铰接点与第四铰接点轴线重合,杆体部为第一连杆。
6、进一步的,连杆组件包括第二连杆和第三连杆,第二连杆远端可转动地连接于转向件的第二铰接点;第三连杆一端可转动地连接于第二连杆的近端,另一端可转动地连接于第三铰接点;定位框架外形为四边形。
7、进一步的,定位框架外形为平行四边形,第一连杆与第二连杆平行,第三连杆与连接部平行。
8、进一步的,第三铰接点与第四铰接点间隔设置,且第三铰接点位于第四铰接点的近侧。
9、进一步的,连杆组件包括第二连杆和第三连杆,第二连杆远端可转动地连接于转向件的第二铰接点;第三连杆一端可转动地连接于第二连杆的近端,另一端可转动地连接于第三铰接点;定位框架外形为五边形。
10、进一步的,定位部定位第三连杆,进而对定位框架进行定位。
11、进一步的,定位部包括设置于座体的限位槽,第三连杆的中部设置有定位轴,定位轴可运动地容置于限位槽;限位槽具有限位壁,限位壁阻挡第三连杆运动,以定位第三连杆。
12、进一步的,限位槽沿座体的宽度方向延伸。
13、进一步的,限位壁为弧形壁。
14、进一步的,驱动组件包括电机、连接电机的丝杠、与丝杠螺纹连接的螺母;拉杆组件的近端与螺母连接;响应于电机的驱动,丝杠驱动螺母直线移动以驱动拉杆组件运动。
15、进一步的,连杆组件包括第二连杆和第三连杆,第二连杆远端可转动地连接于转向件的第二铰接点;第三连杆一端可转动地连接于第二连杆的近端,另一端可转动地连接于第三铰接点。
16、与现有技术相比,本发明的有益效果在于:通过连杆组件设置,所述杆体部、所述连接部和所述连杆组件围成一定位框架,通过定位部对定位框架的定位,从而实现对转向件的定位,避免了钳口组件转动后的角度不稳定,以及由此带来的角度偏移的问题。
技术特征:
1.一种外科器械,其特征在于,包括:
2.根据权利要求1所述的外科器械,其特征在于,所述拉杆组件包括拉杆和第一连杆,所述第一连杆的远端可转动地连接于所述转向件的所述第一铰接点,近端可转动地连接于所述拉杆远端的第四铰接点;所述拉杆的近端连接所述驱动组件,响应于所述驱动组件的驱动,所述拉杆运动以带动所述第一连杆运动驱动所述转向件转动,进而使得所述钳口组件转动;所述杆体部包括所述第一连杆和所述拉杆位于所述第四铰接点与所述第三铰接点之间的部分。
3.根据权利要求2所述的外科器械,其特征在于,所述第三铰接点与所述第四铰接点轴线重合,所述杆体部为所述第一连杆。
4.根据权利要求3所述的外科器械,其特征在于,所述连杆组件包括第二连杆和第三连杆,所述第二连杆远端可转动地连接于所述转向件的第二铰接点;所述第三连杆一端可转动地连接于所述第二连杆的近端,另一端可转动地连接于所述第三铰接点;所述定位框架外形为四边形。
5.根据权利要求4所述的外科器械,其特征在于,所述定位框架外形为平行四边形,所述第一连杆与所述第二连杆平行,所述第三连杆与所述连接部平行。
6.根据权利要求2所述的外科器械,其特征在于,所述第三铰接点与所述第四铰接点间隔设置,且所述第三铰接点位于所述第四铰接点的近侧。
7.根据权利要求6所述的外科器械,其特征在于,所述连杆组件包括第二连杆和第三连杆,所述第二连杆远端可转动地连接于所述转向件的第二铰接点;所述第三连杆一端可转动地连接于所述第二连杆的近端,另一端可转动地连接于所述第三铰接点;所述定位框架外形为五边形。
8.根据权利要求5或7所述的外科器械,其特征在于,所述定位部定位所述第三连杆,进而对所述定位框架进行定位。
9.根据权利要求8所述的外科器械,其特征在于,所述定位部包括设置于所述座体的限位槽,所述第三连杆的中部设置有定位轴,所述定位轴可运动地容置于所述限位槽;所述限位槽具有限位壁,所述限位壁阻挡所述第三连杆运动,以定位所述第三连杆。
10.根据权利要求9所述的外科器械,其特征在于,所述限位槽沿所述座体的宽度方向延伸。
11.根据权利要求9所述的外科器械,其特征在于,所述限位壁为弧形壁。
12.根据权利要求1所述的外科器械,其特征在于,所述驱动组件包括电机、连接所述电机的丝杠、与所述丝杠螺纹连接的螺母;所述拉杆组件的近端与所述螺母连接;响应于所述电机的驱动,所述丝杠驱动所述螺母直线移动以驱动所述拉杆组件运动。
13.根据权利要求1所述的外科器械,其特征在于,所述连杆组件包括第二连杆和第三连杆,所述第二连杆远端可转动地连接于所述转向件的第二铰接点;所述第三连杆一端可转动地连接于所述第二连杆的近端,另一端可转动地连接于所述第三铰接点。
技术总结
本发明公开一种外科器械。外科器械包括:钳口组件;手柄;座体;转向件;驱动组件,设置于手柄内;拉杆组件,远端可转动地连接于转向件的第一铰接点,近端可转动地连接驱动组件;连杆组件,远端可转动地连接于转向件的第二铰接点,近端可转动地连接于拉杆组件的第三铰接点;转向件包括位于第一铰接点与第二铰接点之间的连接部,拉杆组件包括位于第一铰接点与第三铰接点之间的杆体部;杆体部、连接部和连杆组件围成一定位框架;定位部,定位部对定位框架进行定位,进而定位转向件。通过对定位框架的定位,实现对转向件的定位,避免了钳口组件角度不稳定,发生角度偏移的问题。
技术研发人员:孙宝峰,刘炳华,刘向海
受保护的技术使用者:江苏风和医疗器材股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!