一种导管机器人及其控制方法与流程
本发明涉及医疗器械领域,尤其涉及一种导管机器人及其控制方法。
背景技术:
1、介入治疗是利用现代高科技手段进行的一种微创性治疗--就是在医学影像设备的引导下,将特制的导管、导丝等精密器械,引入人体,对体内病态进行诊断和局部治疗。
2、介入治疗应用数字影像技术,扩大了医生的视野,借助导管、导丝延长了医生的双手,它的切口(穿刺点)仅有米粒大小,不用切开人体组织,就可治疗许多过去外科手术治疗或内科治疗疗效欠佳甚至无法治疗的疾病,如肿瘤、血管瘤、各种出血等。介入治疗具有不开刀,创伤小,恢复快,效果好的特点,是未来医学的发展趋势。
3、为了更好的实现介入治疗,现有技术中,研发出了导管机器人,通过导管机器人来控制导管进入体内,从而对体内病态进行诊断和局部治疗。有的介入治疗是在特殊环境下进行,例如血管介入手术,导管机器人避免了医生在导管室直接操作导管、导丝、长期暴露于x射线的困境。这样,可以让医生在射线环境之外远程控制导管、导丝,给医生提供了一个安全的工作环境。也有的介入治疗是在常规的手术中进行的,例如支气管病变检查等。
4、目前的导管机器人如图1所示,手术床9位于导管机器人的右侧,导管机器人的第一操纵器组件3和第二操纵器组件2都安装在台车1上,内导管器械5与外导管器械4分别安装在导管机器人的第一操纵器组件3和第二操纵器组件2的末端位置上,内导管7工作时候处于外导管8内部,内导管7和外导管8均是朝向导管机器人的右侧延伸。在工作时,需将两导管插入引导器6中,引导器伸入患者10的气道(如气管)并固定。其中,在将内导管器械5或外导管器械4安装在第一操纵器组件3或第二操纵器组件2时,内导管7或外导管8的末端器械往往处于不平直状态,需要人工进行调整成平直状态,即调零过程,由于无法自动调零,使得调零的效率和准确度不高,造成很大的困扰,亟需一种能够自动调零的导管机器人提高调零的效率。
技术实现思路
1、鉴于现有技术的不足,本发明提供了一种导管机器人及其控制方法,无需进行人工操作,能够自动进行调零,提高调零效率和准确度。
2、为了实现上述的目的,本发明采用了如下的技术方案:
3、第一方面,本发明实施例提供一种导管机器人,包括:
4、操纵器,包括驱动机构、和检测所述驱动机构的位置的传感器;
5、导管器械,包括导管、和驱动所述导管的末端运动的传动机构,所述传动机构与所述驱动机构可移除的连接;
6、及控制装置,与所述驱动机构耦接,并被配置成用于:
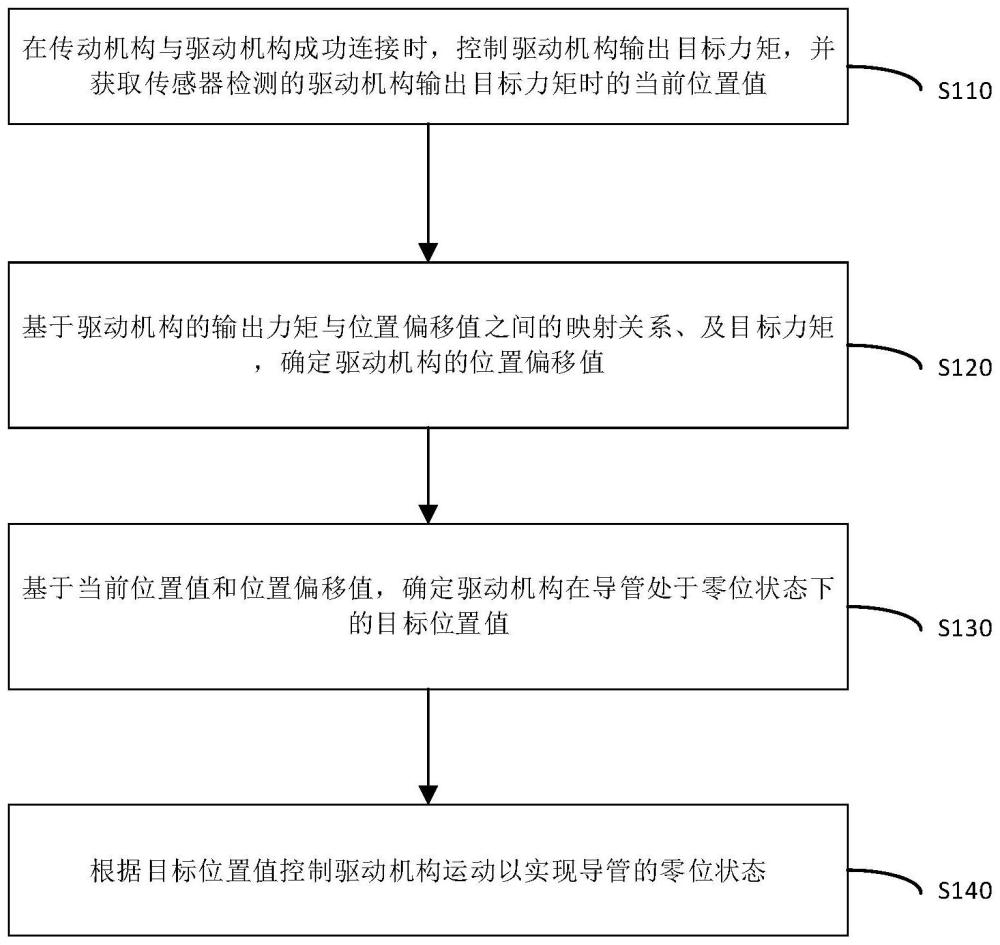
7、在所述传动机构与所述驱动机构成功连接时,控制所述驱动机构输出目标力矩,并获取所述传感器检测的所述驱动机构输出所述目标力矩时的当前位置值;
8、基于所述驱动机构的输出力矩与位置偏移值之间的映射关系、及所述目标力矩,确定所述驱动机构的位置偏移值;
9、基于所述当前位置值和所述位置偏移值,确定所述驱动机构在所述导管处于零位状态下的目标位置值;
10、根据所述目标位置值控制所述驱动机构运动以实现所述导管的零位状态。
11、进一步地,所述控制所述驱动机构输出目标力矩,包括:
12、基于所述驱动机构的旋转方向与所述导管的末端的弯曲方向之间的映射关系,确定所述驱动机构通过所述传动机构拉动所述导管的末端进行弯曲的目标旋转方向;
13、控制所述驱动机构在所述目标旋转方向输出目标力矩。
14、进一步地,所述基于所述当前位置值和所述位置偏移值,确定所述驱动机构在所述导管处于零位状态下的目标位置值,包括:
15、获取所述当前位置值与所述位置偏移值之间的差值;
16、将所述差值作为所述导管在零位状态下的目标位置值。
17、进一步地,所述控制装置还被配置成用于:
18、检测所述传动机构与所述驱动机构是否成功连接。
19、进一步地,所述检测所述传动机构与所述驱动机构是否成功连接,包括:
20、响应于所述导管器械安装至所述操纵器,控制所述驱动机构旋转,并监测驱动所述驱动机构的当前电流值;
21、在所述当前电流值达到预设电流值时,确定所述传动机构与所述驱动机构成功连接,并停止控制所述驱动机构旋转;或者,
22、在所述当前电流值未达到预设电流值时,确定所述传动机构与所述驱动机构未成功连接,并继续控制所述驱动机构旋转。
23、进一步地,所述控制所述驱动机构旋转,包括:
24、控制所述驱动机构在顺时针方向和逆时针方向交替旋转,其中,所述驱动机构在顺时针方向旋转的范围介于[0°,180°],所述驱动机构在逆时针方向旋转的范围介于[-180°,0°]。
25、进一步地,所述驱动机构包括电机和由所述电机驱动转动的驱动盘,所述驱动机构还包括弹性元件,所述弹性元件与所述驱动盘耦接,借助于所述弹性元件的作用,所述驱动盘可在所述弹性元件的弹性形变方向浮动。
26、进一步地,所述传动机构包括传动盘和驱动丝,所述驱动丝一端缠绕于所述传动盘、另一端沿所述导管延伸并固定于所述导管的末端,所述传动盘与所述驱动盘之间通过凹凸配合可移除的连接。
27、进一步地,所述驱动盘和所述传动盘之一包括连接柱、另一包括连接槽,所述连接柱与所述连接槽适配,所述连接柱的顶端被配置成圆弧结构。
28、第二方面,本发明实施例还提供一种导管机器人的控制方法,所述导管机器人包括:
29、操纵器,包括驱动机构、和检测所述驱动机构的位置的传感器;
30、导管器械,包括导管、和驱动所述导管的末端运动的传动机构,所述传动机构与所述驱动机构可移除的连接;
31、所述控制方法包括:
32、在所述传动机构与所述驱动机构成功连接时,控制所述驱动机构输出目标力矩,并获取所述传感器检测的所述驱动机构输出所述目标力矩时的当前位置值;
33、基于所述驱动机构的输出力矩与位置偏移值之间的映射关系、及所述目标力矩,确定所述驱动机构的位置偏移值;
34、基于所述当前位置值和所述位置偏移值,确定所述驱动机构在所述导管处于零位状态下的目标位置值;
35、根据所述目标位置值控制所述驱动机构运动以实现所述导管的零位状态。
36、第三方面,本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述实施例中任一所述的导管机器人的控制方法。
37、本发明实施例的技术方案,通过获取当前位置值和位置偏移值,确定所述驱动机构在所述导管处于零位状态下的目标位置值,控制驱动机构运动实现零位状态,无需进行人工操作,能够自动进行调零,提高调零效率和准确度。
技术特征:
1.一种导管机器人,其特征在于,包括:
2.根据权利要求1所述的导管机器人,其特征在于,所述控制所述驱动机构输出目标力矩,包括:
3.根据权利要求1所述的导管机器人,其特征在于,所述基于所述当前位置值和所述位置偏移值,确定所述驱动机构在所述导管处于零位状态下的目标位置值,包括:
4.根据权利要求1所述的导管机器人,其特征在于,所述控制装置还被配置成用于:
5.根据权利要求4所述的导管机器人,其特征在于,所述检测所述传动机构与所述驱动机构是否成功连接,包括:
6.根据权利要求5所述的导管机器人,其特征在于,所述控制所述驱动机构旋转,包括:
7.根据权利要求1所述的导管机器人,其特征在于,所述驱动机构包括电机和由所述电机驱动转动的驱动盘,所述驱动机构还包括弹性元件,所述弹性元件与所述驱动盘耦接,借助于所述弹性元件的作用,所述驱动盘可在所述弹性元件的弹性形变方向浮动。
8.根据权利要求7所述的导管机器人,其特征在于,所述传动机构包括传动盘和驱动丝,所述驱动丝一端缠绕于所述传动盘、另一端沿所述导管延伸并固定于所述导管的末端,所述传动盘与所述驱动盘之间通过凹凸配合可移除的连接。
9.根据权利要求8所述的导管机器人,其特征在于,所述驱动盘和所述传动盘之一包括连接柱、另一包括连接槽,所述连接柱与所述连接槽适配,所述连接柱的顶端被配置成圆弧结构。
10.一种导管机器人的控制方法,其特征在于,所述导管机器人包括:
11.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求10所述的导管机器人的控制方法。
技术总结
本发明提供了一种导管机器人及其控制方法,该导管机器人包括:操纵器,包括驱动机构、和检测驱动机构的位置的传感器;导管器械,包括导管、和驱动导管的末端运动的传动机构;及控制装置,与驱动机构耦接,并被配置成用于:在传动机构与驱动机构成功连接时,控制驱动机构输出目标力矩,并获取传感器检测的驱动机构输出目标力矩时的当前位置值;基于驱动机构的输出力矩与位置偏移值之间的映射关系、及目标力矩,确定驱动机构的位置偏移值;基于当前位置值和位置偏移值,确定驱动机构在导管处于零位状态下的目标位置值;根据目标位置值控制驱动机构运动以实现导管的零位状态。本发明的方案,无需进行人工操作,能够进行调零,提高调零效率。
技术研发人员:王佳冕,高元倩
受保护的技术使用者:深圳市精锋医疗科技股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!