一种应用于核酸采集的多臂协作核酸采样智能机器人
本发明涉及机器人领域,具体为一种应用于核酸采集的多臂协作核酸采样智能机器人。
背景技术:
1、随着科学技术的发展,机器人对医疗事业以及医护人员的工作产生了很大的影响,现在,市面上对于核酸采样的机器人应用较少,不便模块化,没有彻底解放人力,检测效率低,居民体验效果差。
2、目前现有的核酸采样机器人有以下几类:
3、1)采样车
4、该类型采样机器人效率高,为医护人员带来舒适的环境。但该类采样机器车体形大,仍然需要人工辅助;
5、2)采样台
6、该类型采样机器人效率高,独立性强,但不能移动,无法独自到达多个目的地;
7、因此,需要提供一种效率高、稳定性好、独立性强的可移动多臂协作核酸采样智能机器人。
技术实现思路
1、本发明的目的在于提供一种应用于核酸采集的多臂协作核酸采样智能机器人,解决了背景技术中所提出的问题。
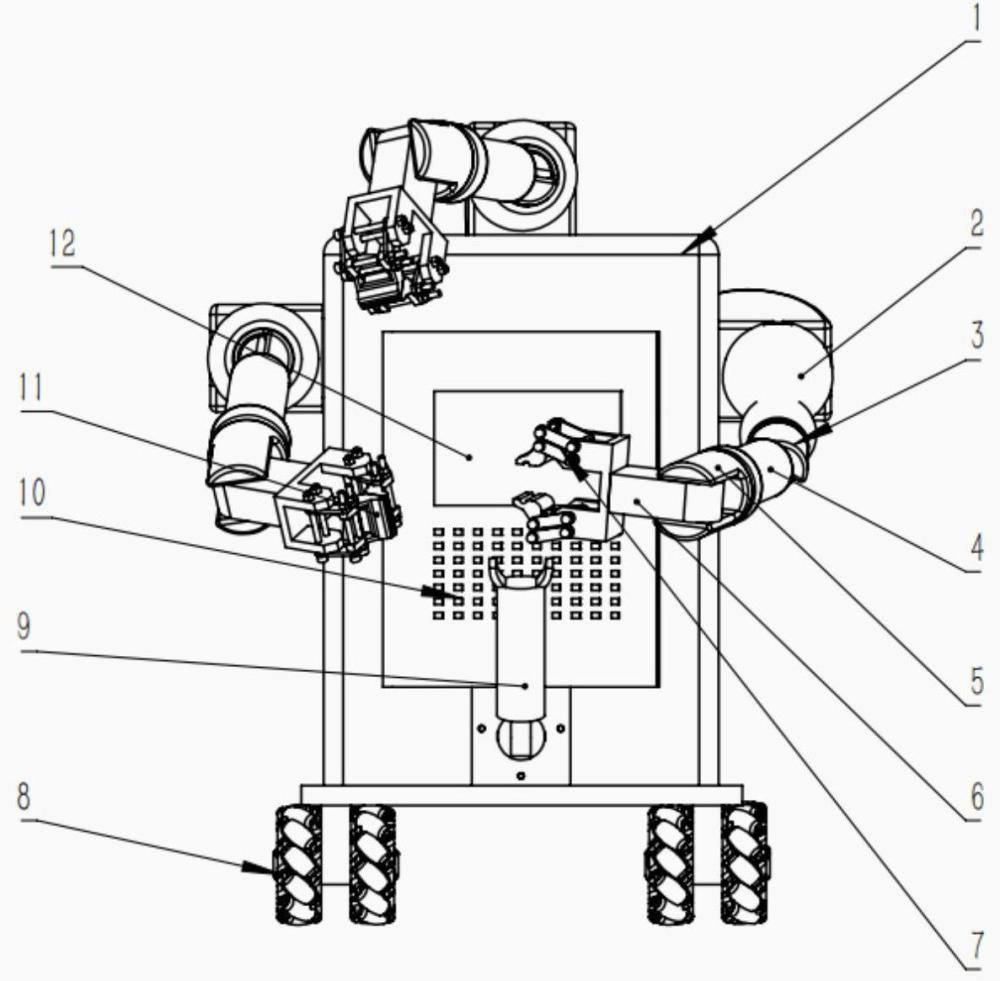
2、为实现上述目的,本发明提供如下技术方案:一种应用于核酸采集的多臂协作核酸采样智能机器人,包括箱体,所述箱体的表面活动铰接有小门,所述小门上固定有显示屏和按钮;
3、所述箱体的表面下侧固定有头部支架;
4、所述小门内上下分别固定有上层挡板和下层挡板,所述箱体的内腔下侧固定有舵机,所述舵机的外端固定有小齿轮,所述小齿轮的外壁啮合有大齿轮,所述大齿轮的顶部固定有转轴,所述转轴贯穿下层挡板且固定连接有试管盘,所述试管盘的表面插接有试管;
5、所述箱体的内腔两侧壁上侧以及箱体的内腔顶部均固定有大臂电机,所述大臂电机的传动轴贯穿箱体且固定连接有大臂,所述大臂的外端通过第一转轴和小臂连接,所述小臂的外端通过第二转轴和固定板连接,所述固定板与活动支架固定连接,所述活动支架的外端活动连接有夹具。
6、作为本发明的一种优选实施方式,所述上层挡板的表面固定有工控电脑。
7、作为本发明的一种优选实施方式,所述第一转轴和第二转轴的外端均固定有伺服电机,通过伺服电机驱动第一转轴和第二转轴转动,从而实现带动小臂和固定板活动。
8、作为本发明的一种优选实施方式,所述箱体的底部四角处均固定有麦轮。
9、作为本发明的一种优选实施方式,所述头部支架的顶部固定有适配的海绵垫。
10、作为本发明的一种优选实施方式,所述夹具为电动夹具,用于夹持试管以及棉签。
11、作为本发明的一种优选实施方式,所述显示屏上还装有人脸识别摄像头。
12、作为本发明的一种优选实施方式,所述小门为电动门,通过电推杆可驱动其自动启闭,并且小门的启闭方式为横向移动。
13、与现有技术相比,本发明的有益效果如下:
14、(1)箱体、大臂、小臂、棉签夹、试管夹、四对麦轮组成了多臂协作核酸采样智能机器人基本框架,达到采集核酸的初步目的;
15、(2)舵机与小齿轮相连,小齿轮与大齿轮相连,大齿轮带动试管盘转动,试管盘与试管相连,使得当需要空试管时,转盘能将空试管转移到最外面,方便右臂的拿取。
16、(3)箱体连接有麦轮装置,实现多臂协作核酸采样智能机器人的全方位移动,从而装置独立性强,方便移动。
17、(4)箱体、头部支架、显示屏与按钮,装有人脸采集装置,确定人的头部的位置,方便完成采集任务,机器人通过工控电脑,可实现对多臂协作核酸采样智能机器人的控制,当需要移动时,麦轮开始工作,带动机器人通过自身的运动特性快速到达目的;
18、本发明能够代替医护完成核酸采集任务,实现重点人群和低风险人群不同场景的快速切换适用,满足大规模高负荷的核酸采样需求,24小时全天候检测,本发明可以解决大规模核酸检测中存在的交叉感染风险大、医护人员短缺、劳动强度大等问题,让核酸检测更加高效便民。
技术特征:
1.一种应用于核酸采集的多臂协作核酸采样智能机器人,包括箱体(1),其特征在于:所述箱体(1)的表面活动铰接有小门,所述小门上固定有显示屏(12)和按钮(10);
2.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述上层挡板(14)的表面固定有工控电脑。
3.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述第一转轴(3)和第二转轴(5)的外端均固定有伺服电机,通过伺服电机驱动第一转轴(3)和第二转轴(5)转动,从而实现带动小臂(4)和固定板(6)活动。
4.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述箱体(1)的底部四角处均固定有麦轮(8)。
5.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述头部支架(9)的顶部固定有适配的海绵垫。
6.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述夹具(11)为电动夹具,用于夹持试管以及棉签。
7.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述显示屏(12)上还装有人脸识别摄像头。
8.根据权利要求1所述的一种应用于核酸采集的多臂协作核酸采样智能机器人,其特征在于:所述小门为电动门,通过电推杆可驱动其自动启闭,并且小门的启闭方式为横向移动。
技术总结
本发明属于机器人领域,具体为一种应用于核酸采集的多臂协作核酸采样智能机器人,包括箱体,箱体的表面活动铰接有小门,小门上固定有显示屏和按钮,小门内上下分别固定有上层挡板和下层挡板,箱体的内腔下侧固定有舵机,舵机的外端固定有小齿轮,小齿轮的外壁啮合有大齿轮,大齿轮的顶部固定有转轴,转轴贯穿下层挡板且固定连接有试管盘,试管盘的表面插接有试管。本发明能够代替医护完成核酸采集任务,实现重点人群和低风险人群不同场景的快速切换适用,满足大规模高负荷的核酸采样需求,24小时全天候检测,本发明可以解决大规模核酸检测中存在的交叉感染风险大、医护人员短缺、劳动强度大等问题,让核酸检测更加高效便民。
技术研发人员:吴神丽,李靖,刘凌,李宜轩,赵英博,蒲静琦,梁小明,姚梓萌
受保护的技术使用者:西安文理学院
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!