一种能够进行多角度调节的消杀机器人及其工作方法
本发明涉及消杀机器人领域,具体为一种能够进行多角度调节的消杀机器人及其工作方法。
背景技术:
1、消毒机是一种通过的机械原理的运作,从而产生物理或化学消毒元素作用于有毒物进而达到消毒目的的机器,被广泛应用于医疗、和日常生活领域,消毒机发展到今天已经有了很多细小的分类,机器人是一种能够半自主或全自主工作的智能机器,在对环境进行消毒时需要使用到消杀机器人。
2、现有的消杀机器人往往只能够对固定高度喷雾,不能够根据实际需要对喷嘴的高度进行调节,具有一定的局限性,从而给消杀工作带来了不便,降低了消杀工作的效率,增加了工作人员的操作工序。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种能够进行多角度调节的消杀机器人,包括底盘,所述底盘上端固定连连接有防护壳,所述底盘内部转动连接有套筒,所述套筒内部滑动连接有滑杆,所述滑杆上端固定连接有雾化喷头,所述滑杆上方侧壁转动连接有转动座,转动座下端固定连接有第一连接块,所述第一连接块外壁下方固定连接有螺纹块,所述防护壳内部设置有驱动组件,所述驱动组件用于驱动螺纹块移动,所述底盘下端设置有传动组件,所述传动组件用于带动套筒转动。
3、优选的,所述套筒内壁固定连接有限位块,所述滑杆外壁固定连接有限位块,所述限位块位于限位槽内部且与之滑动连接。
4、优选的,所述驱动组件包括有第一电机和螺纹杆,位于所述套筒后方的螺纹块上端面开设有螺纹孔,所述底盘上端转动连接有螺纹杆,所述螺纹杆与螺纹孔螺纹连接,所述螺纹杆圆周面固定连接有第一锥齿轮,所述底盘上端固定连接有第一电机,所述第一电机输出轴端固定连接有第二锥齿轮,所述第一锥齿轮与第二锥齿轮啮合。
5、优选的,位于所述套筒前方的螺纹块上端面开设有滑孔,所述底盘上端固定连接有限位杆,所述限位杆侧壁与滑孔滑动连接。
6、优选的,所述传动组件包括有往复丝杆与第一齿轮,所述底盘下端转动连接有传动轴,所述传动轴前后两端均转动连接有轮胎,所述传动轴侧壁固定连接有往复丝杆,所述往复丝杆螺纹连接有第二连接块,所述第二连接块右端固定连接有第一齿条,所述套筒下端固定连接有第一齿轮,所述第一齿轮与第一齿条啮合。
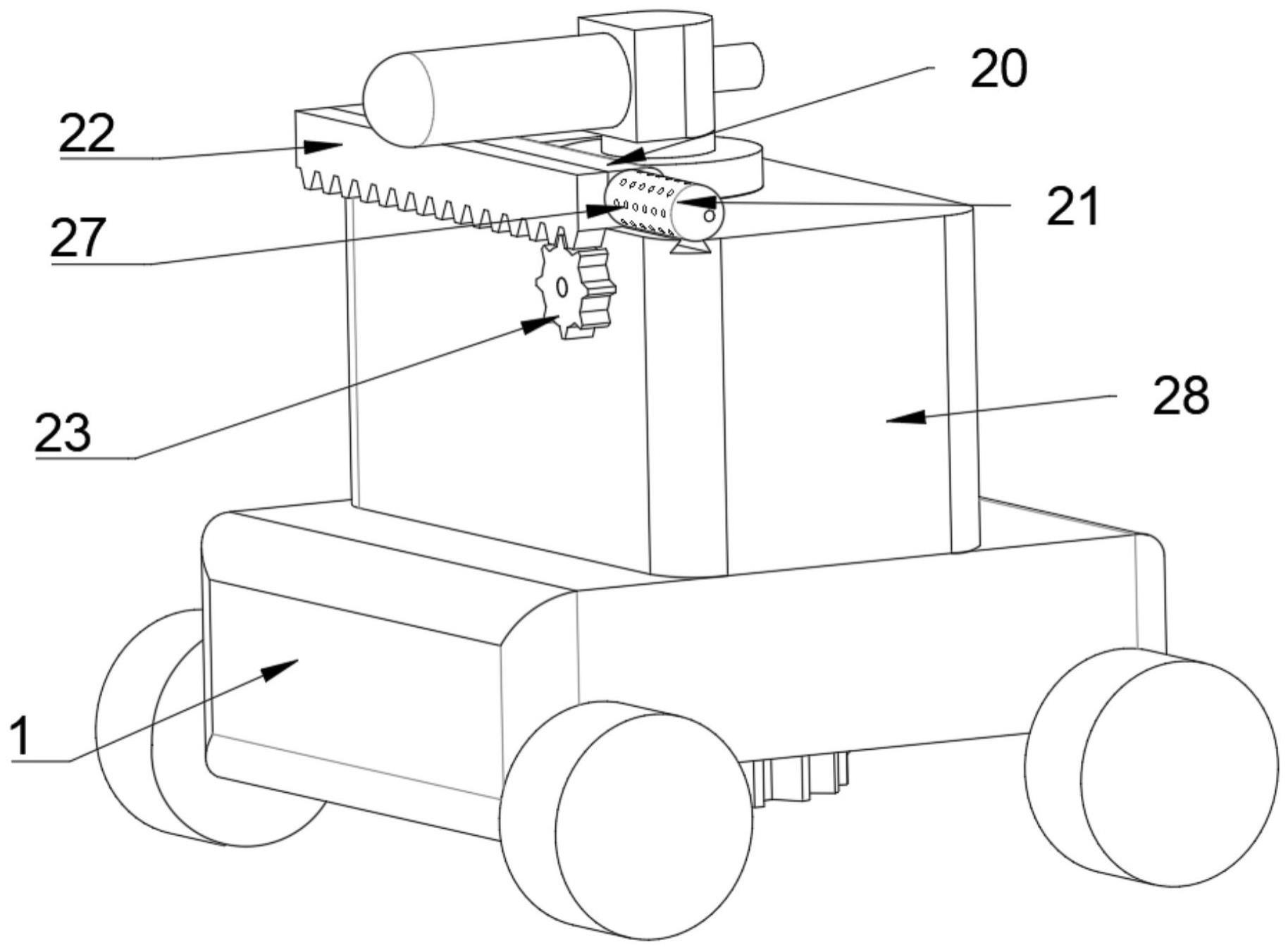
7、优选的,所述防护壳上端滑动连接有固定杆,所述固定杆前端固定连接有喷嘴,所述喷嘴侧壁与前端均开设有喷孔,所述固定杆左端固定连接有第二齿条,所述防护壳内部固定连接有第二电机,所述第二电机输出轴端固定连接有第二齿轮,所述第二齿轮与第二齿条啮合。
8、优选的,所述防护壳上端面开设有燕尾槽,所述固定杆下端固定连接有燕尾块,所述燕尾块位于燕尾槽内部且与之滑动连接。
9、本发明还提供一种能够进行多角度调节的消杀机器人的工作方法,包括以下步骤:
10、s1:通过启动第一电机便带动雾化喷头升高或者降低,从而能够调节雾化喷头高度,便于雾化喷头对不同环境进行使用;
11、s2:通过雾化喷头喷出的消毒液,达到消毒的效果;
12、s3:通过第一齿条往复移动带动第一齿轮往复转动,从而带动套筒往复转动,便带动雾化喷头往复移动,从而加大消毒液喷出的面积;
13、s4:通过轮胎转带动转动轴转动,从而带动往复丝杆转动,便为第一齿轮移动提供了动力;
14、s5:通过控制第二电机启动带动第二齿轮转动,便带动第二齿条移动,从而将固定杆从防护壳移动出来,便带动喷嘴移动,通过喷嘴喷出的药液可对一些较窄的死角进行消毒杀菌。
15、(三)有益效果
16、与现有技术相比,本发明的有益效果是:
17、1.本发明通过第一电机、第一锥齿轮、第二锥齿轮、螺纹杆、螺纹块、第一连接块和转动座的配合下,启动第一电机便可带动螺纹杆转动,从而带动螺纹块移动,移动的螺纹块带动第一连接块移动,从而带动转动座移动,转动座移动便可带动滑杆移动,从而带动雾化喷头移动,便达到调节雾化喷头的高度,能够保证装置在不同高度环境下工作,提高了装置的实用性,同时配合转动的轮胎带动传动轴,从而带动往复丝杆转动,便通过第二连接块带动第一齿条往复移动,从而带动第一齿轮往复转动,转动的第一齿轮带动套筒转动,从而带动滑杆转动,便带动雾化喷头摆头,从而加大药液的喷出面积提高了消杀的工作效率。
18、2.本发明通过第二电机、第二齿轮、第二齿条、固定杆和喷嘴的配合下,启动第二电机带动第二齿轮转动,从而带动第二齿条,便带动固定杆移动,使得喷嘴从防护壳上端伸出,从而可以对一些较窄的死角进行喷消毒液,从而提高了装置的实用性。
技术特征:
1.一种能够进行多角度调节的消杀机器人,包括底盘(1),其特征在于:所述底盘(1)上端固定连连接有防护壳(28),所述底盘(1)内部转动连接有套筒(2),所述套筒(2)内部滑动连接有滑杆(3),所述滑杆(3)上端固定连接有雾化喷头(5),所述滑杆(3)上方侧壁转动连接有转动座(4),转动座(4)下端固定连接有第一连接块(6),所述第一连接块(6)外壁下方固定连接有螺纹块(7),所述防护壳(28)内部设置有驱动组件,所述驱动组件用于驱动螺纹块(7)移动,所述底盘(1)下端设置有传动组件,所述传动组件用于带动套筒(2)转动。
2.根据权利要求1所述的一种能够进行多角度调节的消杀机器人,其特征在于:所述套筒(2)内壁固定连接有限位块(13),所述滑杆(3)外壁固定连接有限位块(13),所述限位块(13)位于限位槽(12)内部且与之滑动连接。
3.根据权利要求1所述的一种能够进行多角度调节的消杀机器人,其特征在于:所述驱动组件包括有第一电机(10)和螺纹杆(8),位于所述套筒(2)后方的螺纹块(7)上端面开设有螺纹孔(29),所述底盘(1)上端转动连接有螺纹杆(8),所述螺纹杆(8)与螺纹孔(29)螺纹连接,所述螺纹杆(8)圆周面固定连接有第一锥齿轮(9),所述底盘(1)上端固定连接有第一电机(10),所述第一电机(10)输出轴端固定连接有第二锥齿轮(11),所述第一锥齿轮(9)与第二锥齿轮(11)啮合。
4.根据权利要求1所述的一种能够进行多角度调节的消杀机器人,其特征在于:位于所述套筒(2)前方的螺纹块(7)上端面开设有滑孔(30),所述底盘(1)上端固定连接有限位杆(14),所述限位杆(14)侧壁与滑孔(30)滑动连接。
5.根据权利要求1所述的一种能够进行多角度调节的消杀机器人,其特征在于:所述传动组件包括有往复丝杆(16)与第一齿轮(19),所述底盘(1)下端转动连接有传动轴(15),所述传动轴(15)前后两端均转动连接有轮胎,所述传动轴(15)侧壁固定连接有往复丝杆(16),所述往复丝杆(16)螺纹连接有第二连接块(17),所述第二连接块(17)右端固定连接有第一齿条(18),所述套筒(2)下端固定连接有第一齿轮(19),所述第一齿轮(19)与第一齿条(18)啮合。
6.根据权利要求1所述的一种能够进行多角度调节的消杀机器人,其特征在于:所述防护壳(28)上端滑动连接有固定杆(20),所述固定杆(20)前端固定连接有喷嘴(21),所述喷嘴(21)侧壁与前端均开设有喷孔(27),所述固定杆(20)左端固定连接有第二齿条(22),所述防护壳(28)内部固定连接有第二电机(24),所述第二电机(24)输出轴端固定连接有第二齿轮(23),所述第二齿轮(23)与第二齿条(22)啮合。
7.根据权利要求1所述的一种能够进行多角度调节的消杀机器人,其特征在于:所述防护壳(28)上端面开设有燕尾槽(25),所述固定杆(20)下端固定连接有燕尾块(26),所述燕尾块(26)位于燕尾槽(25)内部且与之滑动连接。
8.一种如权利要求1-7中任一项所述的能够进行多角度调节的消杀机器人的工作方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种能够进行多角度调节的消杀机器人,包括底盘,底盘上端固定连连接有防护壳,底盘内部转动连接有套筒,套筒内部滑动连接有滑杆,滑杆上端固定连接有雾化喷头,滑杆上方侧壁转动连接有转动座,转动座下端固定连接有第一连接块,第一连接块外壁下方固定连接有螺纹块,本发明通过第一电机、第一锥齿轮、第二锥齿轮、螺纹杆、螺纹块、第一连接块和转动座的配合下,启动第一电机便可带动螺纹杆转动,从而带动螺纹块移动,移动的螺纹块带动第一连接块移动,从而带动转动座移动,转动座移动便可带动滑杆移动,从而带动雾化喷头移动,便达到调节雾化喷头的高度,能够保证装置在不同的环境下工作,提高了装置的实用性。
技术研发人员:揭琳锋,石骥武,周翔宇
受保护的技术使用者:扬州工业职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!