操作盒以及手术机器人的制作方法
本申请涉及介入手术器械,特别涉及一种操作盒以及一种手术机器人。
背景技术:
1、血管介入手术是由医生将导管/导丝/支架引入人体以对病灶部位进行治疗的一种手段。传统的血管介入手术中,为了减小x射线的辐射,医生必须穿着厚重的铅衣,这对于医生来说是一个沉重的负担。而如果不穿着铅衣,医生会遭受强烈的辐射,对于医生的健康是很大的威胁。主从手术操作系统允许医生远程操作手术,可以改善医生的手术操作环境,具有良好的前景,逐渐成为医疗机器人领域的重点研发对象。
2、一方面,由于操作对象的特殊性(比如导丝导管等操作对象需要进入血管),在设计操作机构时,如何在保证较高的操作精度下避免对操作对象的损伤是一个难题。另一方面,特殊的应用场景要求手术机器人的设计不但要考虑手术操作机构的设计,还要考虑到手术环境下的特殊要求,包括但不限于医生操作空间大小、医生操作难易、无菌设计、手术成本等。
技术实现思路
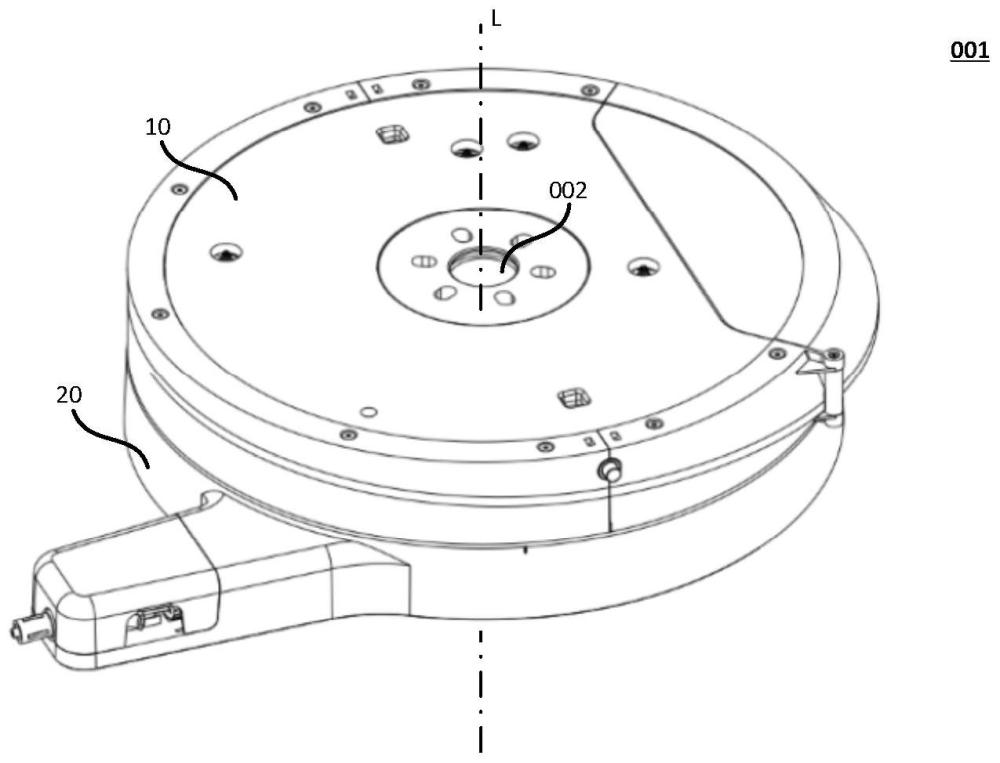
1、为解决上述技术问题,本申请公开了一种操作盒,包括纵向轴线依次设置的:转动部,包括容置槽,所述容置槽用于容置细长状的医疗器械;以及固定部,包括导引通道,所述引导通道用于引导所述医疗器械的远端,由所述容置槽进入所述引导通道后沿目标方向移动。
2、在一些实施例中,所述操作盒包括沿所述纵向轴线贯穿所述转动部和所述固定部的第一通孔,所述第一通孔用于供支撑轴穿过,使所述支撑轴与所述固定部连接。
3、在一些实施例中,所述操作盒还包括:第一转动连接件,设置在所述固定部和所述转动部之间;以及第二转动连接件,设置在所述转动部和所述支撑轴之间。
4、在一些实施例中,所述转动部包括沿所述纵向轴线依次设置的:转动盒体,包括第一容置腔,所述第一容置腔被配置为容置一个或多个驱动模块,其中,所述第一容置腔环绕所述纵向轴线;以及容置件,包括垂直于所述纵向轴线的第一表面,所述第一表面包括弧形凹槽。
5、在一些实施例中,所述转动盒体包括第一顶板、第一底板、以及第一外侧板,所述第一顶板和所述第一底板沿所述纵向轴线相对设置,所述第一外侧板沿所述纵向轴线设置在所述第一顶板和所述第一底板之间,所述第一外侧板的一端同所述第一顶板的外缘连接,所述第一外侧板的另一端同所述第一底板的外缘连接,所述第一顶板、所述第一底板、以及所述第一外侧板围成所述第一容置腔。
6、在一些实施例中,所述第一顶板垂直于所述纵向轴线,包括:至少一个第二通孔,所述第二通孔用于供传动轴穿过,所述传动轴与所述驱动模块传动连接;和/或至少一个第三通孔,所述第三通孔用于供连接件穿过,所述连接件与所述转动盒体机械连接。
7、在一些实施例中,所述转动盒体还包括:第一内侧板,一端连接所述第一顶板的内缘,另一端连接所述第一底板的内缘;以及至少一个装夹部,安装在所述第一内侧板上。
8、在一些实施例中,所述转动部还包括连接筒,包括:第一端,连接所述转动盒体;以及第二端,连接所述支撑轴和所述固定部。
9、在一些实施例中,所述固定部包括固定盒体,包括第二容置腔,所述第二容置腔用于容置所述转动部的部分或全部,其中所述第二容置腔环绕所述纵向轴线。
10、在一些实施例中,所述固定盒体包括:第一安装孔,为第一转动连接件提供安装空间。
11、在一些实施例中,所述固定盒体包括第二底板,所述第二底板包括至少一个镂空结构。
12、在一些实施例中,所述固定部包括转盘罩,包括:第二表面,与所述第一表面在轴向方向间隔预设距离设置,其中所述预设距离大于所述医疗器械的直径。
13、在一些实施例中,所述固定部包括:导引件,包括所述导引通道、与所述导引通道一侧连通的第一开口,以及与所述导引通道另一侧连通的第二开口,其中,所述第二开口靠近所述容置槽的槽口,所述转动部通过转动将所述医疗器械的远端从所述容置槽内推出,所述导引件通过所述导引通道导引所述医疗器械的远端,由所述容置槽出来并经由所述第二开口进入所述导引通道后,在所述导引通道内做直线运动。
14、在一些实施例中,所述操作盒是一次性且无菌的。
15、本申请还提供一种手术机器人,包括本申请所述的操作盒。
16、本申请提供的操作盒和手术机器人:细长医疗器械缠绕在容置槽内,通过转动部的转动来推进医疗器械,不需要专门的夹具,不会损伤医疗器械,也不存在打滑的可能;转动部和固定部沿着纵向轴线设置,在保证操作功能的前提下,合理利用了空间,可以为医生提供较大的操作空间;该操作盒整体设计为一次性的并且是无菌的,可以满足手术的无菌要求。
技术特征:
1.一种操作盒,其特征在于,包括:沿纵向轴线依次设置的
2.如权利要求1所述的操作盒,其特征在于,包括沿所述纵向轴线贯穿所述转动部和所述固定部的第一通孔,所述第一通孔用于供支撑轴穿过,使所述支撑轴与所述固定部连接。
3.如权利要求2所述的操作盒,其特征在于,还包括:
4.如权利要求1所述的操作盒,其特征在于,所述转动部包括沿所述纵向轴线依次设置的:
5.如权利要求4所述的操作盒,其特征在于,所述转动盒体包括第一顶板、第一底板,以及第一外侧板,所述第一顶板和所述第一底板沿所述纵向轴线相对设置,所述第一外侧板沿所述纵向轴线设置在所述第一顶板和所述第一底板之间,所述第一外侧板的一端同所述第一顶板的外缘连接,所述第一外侧板的另一端同所述第一底板的外缘连接,所述第一顶板、所述第一底板、以及所述第一外侧板围成所述第一容置腔。
6.如权利要求5所述的操作盒,其特征在于,包括:
7.如权利要求5所述的操作盒,其特征在于,所述转动盒体还包括:
8.如权利要求4所述的操作盒,其特征在于,所述转动部还包括连接筒,包括:
9.如权利要求1所述的操作盒,其特征在于,所述固定部包括:
10.如权利要求9所述的操作盒,其特征在于,所述固定盒体包括:
11.如权利要求9所述的操作盒,其特征在于,所述固定盒体包括第二底板,所述第二底板包括至少一个镂空结构。
12.如权利要求4所述的操作盒,其特征在于,所述固定部包括转盘罩,包括:
13.如权利要求1所述的操作盒,其特征在于,所述固定部包括:
14.如权利要求1所述的操作盒,其特征在于,所述操作盒是一次性且无菌的。
15.一种手术机器人,其特征在于,包括权利要求1-14中任意一个权利要求所述的操作盒。
技术总结
本申请涉及一种操作盒及手术机器人,该操作盒包括沿纵向轴线依次设置的转动部,包括容置槽,所述容置槽用于容置细长状的医疗器械;以及固定部,包括导引通道,所述引导通道用于引导所述医疗器械的远端,由所述容置槽进入所述引导通道后沿目标方向移动。本申请在保证操作功能的前提下,合理利用了空间,可以为医生提供较大的操作空间。
技术研发人员:程舒宇,赵柏湖,梁良军,王永胜
受保护的技术使用者:杭州德诺脑神经医疗科技有限公司
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!