康复机器人控制方法及系统与流程
本发明涉及康复机器人,尤其是涉及一种康复机器人控制方法及系统。
背景技术:
1、康复机器人在运行前,需要保证用户已正确完成穿戴工作。为了提升康复机器人的控制效果,在不同的用户使用康复机器人之前,需要检测用户关节是否与康复机器人的旋转轴对准,现有的穿戴检测方式通常采用目测或发射可见光判断用户关节是否与康复机器人的旋转轴对准,当用户关节与康复机器人的旋转轴存在位置偏移时,需要人为确定康复机器人的调节量,以使康复机器人的旋转轴与用户关节位置对准,耗费时间较长穿戴效率较低,且容易存在偏差导致对准精度较低。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种康复机器人控制方法及系统,能够实现对康复机器人的自动对准控制,节省了用户的穿戴时间,提升了用户关节与康复机器人旋转轴的对准精度。
2、为了实现上述目的,本发明实施例采用的技术方案如下:
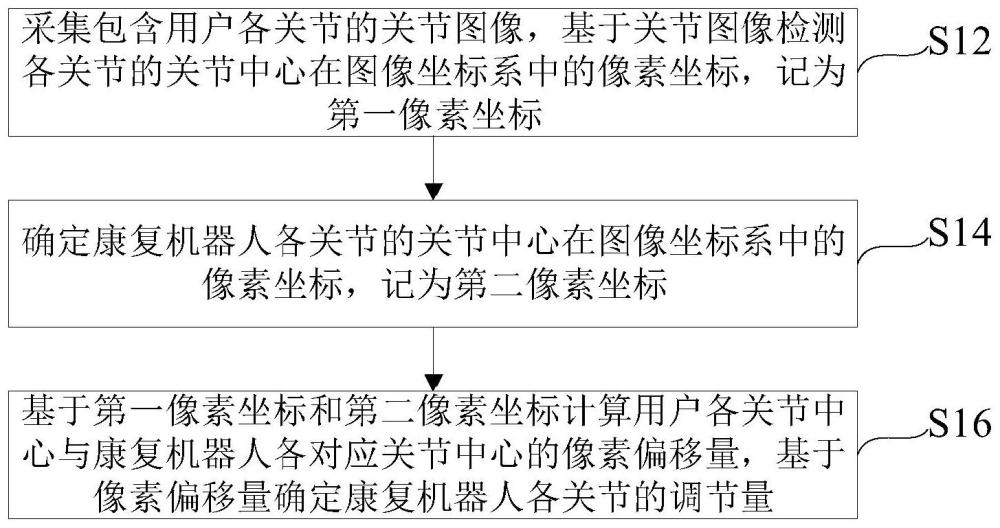
3、第一方面,本发明实施例提供了一种康复机器人控制方法,包括:采集包含用户各关节的关节图像,基于所述关节图像检测所述各关节的关节中心在图像坐标系中的像素坐标,记为第一像素坐标;确定康复机器人各关节的关节中心在所述图像坐标系中的像素坐标,记为第二像素坐标;基于所述第一像素坐标和所述第二像素坐标计算所述用户各关节中心与所述康复机器人各对应关节中心的像素偏移量,基于所述像素偏移量确定所述康复机器人各关节的调节量;基于所述调节量对所述康复机器人进行控制,以使所述用户各关节位置与所述康复机器人各关节位置对准。
4、进一步,本发明实施例提供了第一方面的第一种可能的实施方式,其中,所述确定康复机器人各关节的关节中心在所述图像坐标系中的像素坐标的步骤,包括:获取采集所述关节图像的图像传感器的内参矩阵;基于所述图像传感器与所述康复机器人的相对位置及所述内参矩阵,确定所述康复机器人各关节的关节中心在所述图像坐标系中的像素坐标。
5、进一步,本发明实施例提供了第一方面的第二种可能的实施方式,其中,所述关节包括肩关节,所述基于所述像素偏移量确定所述康复机器人各关节的调节量的步骤,包括:获取所述康复机器人的肩关节中心在所述图像传感器的相机坐标系下的初始位置坐标;基于所述初始位置坐标、所述图像传感器的内参矩阵及所述像素偏移量计算所述康复机器人的肩关节中心的调节量。
6、进一步,本发明实施例提供了第一方面的第三种可能的实施方式,其中,所述肩关节的调节量的计算算式为:
7、
8、其中,δxs为所述康复机器人的肩关节中心在水平方向的调节量,δys为所述康复机器人的肩关节在竖直方向的调节量,k为采集所述关节图像的图像传感器的内参矩阵,(xs1,ys1)为用户的肩关节中心在图像坐标系中的像素坐标,(xs2,ys2)为所述康复机器人的肩关节中心在所述图像坐标系中的像素坐标,(x0,y0,z0)为所述康复机器人的肩关节中心在所述图像传感器的相机坐标系下的初始位置坐标。
9、进一步,本发明实施例提供了第一方面的第四种可能的实施方式,其中,所述关节包括肘关节,所述肘关节的调节量的计算算式为:
10、
11、其中,lu*为所述康复机器人的大臂长度的绝对调节量,lu为所述康复机器人的当前大臂长度,(xe1,ye1)为用户的肘关节中心在所述图像坐标系中的像素坐标,(xe2,ye2)为所述康复机器人的肘关节中心在所述图像坐标系中的像素坐标,lu,min和lu,max分别为lu的最小可调节量和最大可调节量。
12、进一步,本发明实施例提供了第一方面的第五种可能的实施方式,其中,所述关节包括腕关节,所述腕关节的调节量的计算算式为:
13、
14、其中,ll*为所述康复机器人的小臂长度的绝对调节量,ll为所述康复机器人的当前小臂长度,(xw1,yw1)为用户的腕关节中心在所述图像坐标系中的像素坐标,(xw2,yw2)为所述康复机器人的腕关节中心在所述图像坐标系中的像素坐标,ll,min和ll,max分别为ll的最小可调节量和最大可调节量。
15、进一步,本发明实施例提供了第一方面的第六种可能的实施方式,其中,所述基于所述关节图像检测所述各关节的关节中心在图像坐标系中的像素坐标的步骤,包括:基于预设的姿态估计算法从所述关节图像中识别出用户各个关节中心点的像素坐标。
16、第二方面,本发明实施例还提供了一种康复机器人控制系统,用于执行如第一方面任一项所述的康复机器人控制方法,所述康复机器人控制系统包括:机器人、图像传感器、控制器和调节装置;所述图像传感器,用于采集包含用户各关节的关节图像,基于所述关节图像检测所述各关节的关节中心在图像坐标系中的像素坐标,记为第一像素坐标;所述控制器,用于确定康复机器人各关节的关节中心在所述图像坐标系中的像素坐标,记为第二像素坐标;基于所述第一像素坐标和所述第二像素坐标计算所述用户各关节中心与所述康复机器人各对应关节中心的像素偏移量,基于所述像素偏移量确定所述康复机器人各关节的调节量;所述调节装置,用于基于所述调节量对所述康复机器人进行控制,以使所述用户各关节位置与所述康复机器人各关节位置对准。
17、进一步,本发明实施例提供了第二方面的第一种可能的实施方式,其中,所述机器人包括上肢外骨骼,所述关节包括肩关节、肘关节和腕关节。
18、进一步,本发明实施例提供了第二方面的第二种可能的实施方式,其中,所述调节量包括所述肩关节中心在水平方向的调节量、所述肩关节在竖直方向的调节量、所述康复机器人的大臂长度的绝对调节量和所述康复机器人的小臂长度的绝对调节量,所述调节装置包括:肩关节水平调节装置、肩关节竖直调节装置、大臂长度调节装置和小臂长度调节装置。
19、本发明实施例提供了一种康复机器人控制方法及系统,通过检测用户各关节的关节中心在图像坐标系中的像素坐标以及康复机器人各关节的关节中心在图像坐标系中的像素坐标,可以检测出像素偏移量,根据像素偏移量计算出康复机器人各关节的调节量,无需人为确定调节量,实现了对康复机器人的自动对准控制,节省了穿戴时间,提升了用户关节与康复机器人旋转轴的对准精度。
20、本发明实施例的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本发明实施例的上述技术即可得知。
21、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种康复机器人控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定康复机器人各关节的关节中心在所述图像坐标系中的像素坐标的步骤,包括:
3.根据权利要求2所述的方法,其特征在于,所述关节包括肩关节,所述基于所述像素偏移量确定所述康复机器人各关节的调节量的步骤,包括:
4.根据权利要求3所述的方法,其特征在于,所述肩关节的调节量的计算算式为:
5.根据权利要求1所述的方法,其特征在于,所述关节包括肘关节,所述肘关节的调节量的计算算式为:
6.根据权利要求1所述的方法,其特征在于,所述关节包括腕关节,所述腕关节的调节量的计算算式为:
7.根据权利要求1所述的方法,其特征在于,所述基于所述关节图像检测所述各关节的关节中心在图像坐标系中的像素坐标的步骤,包括:
8.一种康复机器人控制系统,其特征在于,用于执行如权利要求1-7任一项所述的康复机器人控制方法,所述康复机器人控制系统包括:机器人、图像传感器、控制器和调节装置;
9.根据权利要求8所述的系统,其特征在于,所述机器人包括上肢外骨骼,所述关节包括肩关节、肘关节和腕关节。
10.根据权利要求8所述的系统,其特征在于,所述调节量包括所述肩关节中心在水平方向的调节量、所述肩关节在竖直方向的调节量、所述康复机器人的大臂长度的绝对调节量和所述康复机器人的小臂长度的绝对调节量,所述调节装置包括:肩关节水平调节装置、肩关节竖直调节装置、大臂长度调节装置和小臂长度调节装置。
技术总结
本发明提供了一种康复机器人控制方法及系统,涉及康复机器人技术领域,该康复机器人控制方法包括:采集包含用户各关节的关节图像,基于所述关节图像检测所述各关节的关节中心在图像坐标系中的像素坐标,记为第一像素坐标;确定康复机器人各关节的关节中心在所述图像坐标系中的像素坐标,记为第二像素坐标;基于所述第一像素坐标和所述第二像素坐标计算所述用户各关节中心与所述康复机器人各对应关节中心的像素偏移量,基于所述像素偏移量确定所述康复机器人各关节的调节量;基于所述调节量对所述康复机器人进行控制,以使所述用户各关节位置与所述康复机器人各关节位置对准。本发明能够实现用户关节与康复机器人关节的自动对准控制。
技术研发人员:黄冠,吴剑煌,孙维
受保护的技术使用者:深圳华鹊景医疗科技有限公司
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!