一种介入手术机器人力位控制结构及其控制方法与流程
本发明涉及机械控制,尤其涉及一种介入手术机器人力位控制结构及其控制方法。
背景技术:
1、介入手术需要更加精确位置控制,体现在导丝的精确位置控制。传统轮式送入导丝夹持方法,若预紧力过小存在打滑的情况,而预紧力过大则会破坏导丝涂层,或导致摩擦轮破损产生碎屑侵入患者体内。而介入手术机器人执行端若采用直线推送装置,则体积过于臃肿,且推送不具有连续性。其他方法力控受传感器安装影响,传感器无法使用传统灭菌处理,且传感器不应安装在直接与人体接触的零件上,以避免对人体造成伤害。为此,我们提出一种介入手术机器人力位控制结构及其控制方法。
技术实现思路
1、基于背景技术存在的技术问题,本发明提出了一种介入手术机器人力位控制结构及其控制方法,通过调整直线电机的位置以及旋转电机的转速,能准确控制导丝前后运动的力,速度,位置的大小,且导丝响应速度明显会优于传统的两轮夹紧的同步转动的方法,解决了现有技术无法有效的避免打滑和破坏导丝涂层,或导致摩擦轮破损产生碎屑侵入患者体内的问题。
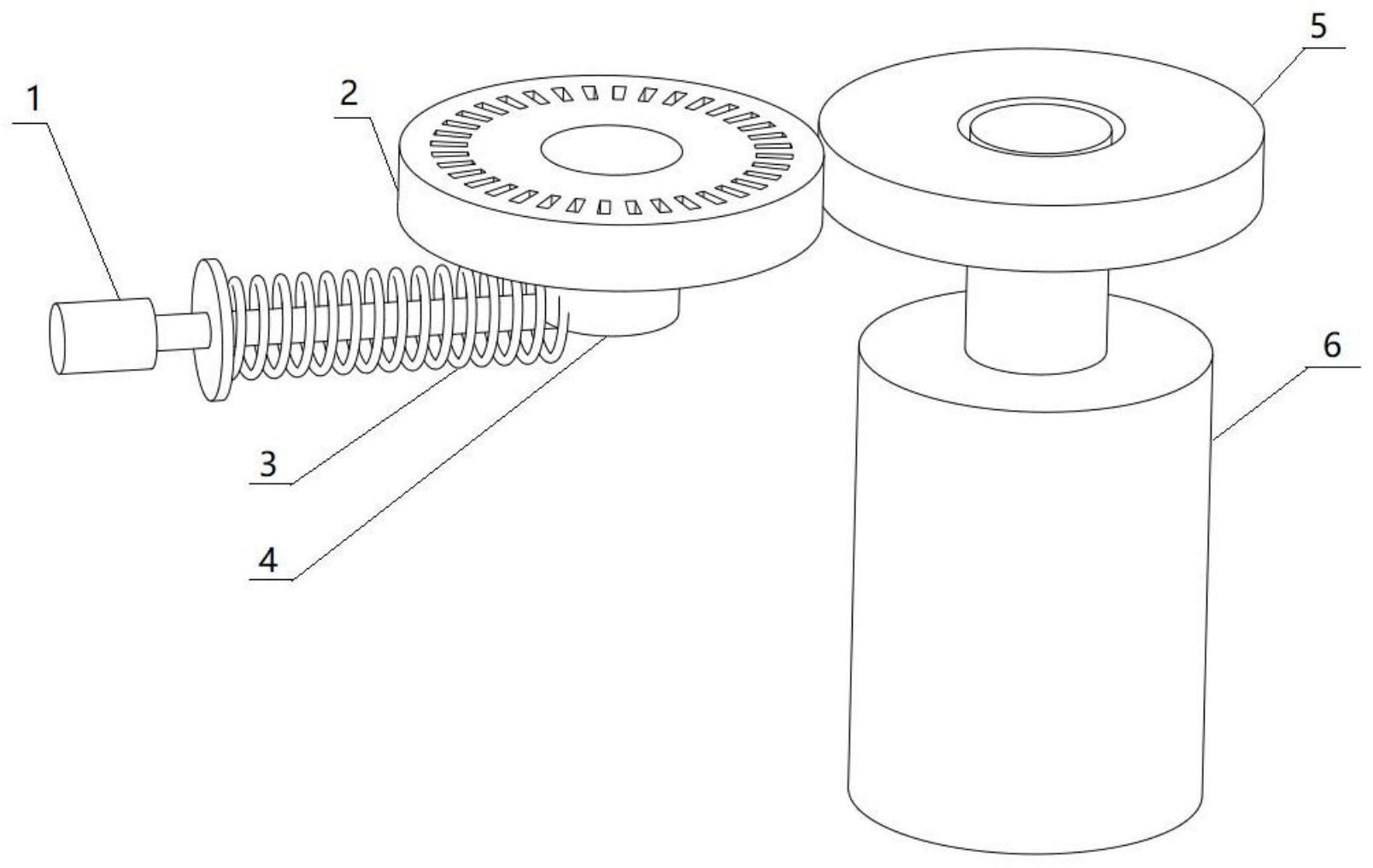
2、本发明提供如下技术方案:一种介入手术机器人力位控制结构,包括直线电机、夹紧轮、弹性件、转轴、摩擦轮、旋转电机;
3、所述摩擦轮与旋转电机同轴且刚性连接,所述夹紧轮与摩擦轮之间的间隔为导丝的直径,所述夹紧轮与转轴转动连接,且夹紧轮和转轴能够整体沿直线电机的导轨方向自由运动,所述弹性件的两端分别与直线电机和转轴连接;
4、所述夹紧轮边缘的静摩擦系数大于摩擦轮边缘的滑动摩擦系数,所述直线电机通过弹性件推动夹紧轮配合摩擦轮夹紧导丝,所述旋转电机用于带动摩擦轮旋转推送导丝。
5、优选的,所述夹紧轮上设置有转速传感器。
6、优选的,所述夹紧轮采用光栅轮。
7、优选的,所述旋转电机上设置有编码器。
8、一种介入手术机器人力位控制方法,包括如下步骤:
9、s1、将导丝置于光栅轮以及摩擦轮之间;
10、s2、通过控制旋转电机,带动与旋转电机转轴刚性连接的摩擦轮同速度转动,但导丝与摩擦轮之间不存在压力,因此导丝并不运动;
11、s3、通过控制直线电机位置,从而压缩弹性件,进而使摩擦轮与导丝、导丝与夹紧轮之间产生压力,夹紧的瞬间导丝速度为0,而导丝与摩擦轮之间存在滑动,摩擦轮对导丝产生滑动摩擦力;
12、夹紧轮边缘的静摩擦系数大于摩擦轮边缘的滑动摩擦系数,导丝受到摩擦力而运动时,始终能够带动夹紧轮同速度运动;
13、s4、当夹紧轮与摩擦轮不同速时,通过计算直线电机的位置,利用弹性件的压力,以及摩擦轮速度差,计算得出当前对导丝施力大小;
14、当夹紧轮与摩擦轮同速时,则导丝处于匀速位移状态;
15、s5、通过调整直线电机的位置以及旋转电机的转速,控制导丝前后运动的力,速度,位置的大小。
16、优选的,所述导丝启动时的位置控制方法如下:
17、旋转电机的转速v6逐步从0提升至vm;
18、直线电机开始向右以速度v1(t)运动,运行到时刻t1,则压缩弹性件的弹力大小felastic为:
19、
20、由于直线电机与弹性件相连接,因此弹性件被压缩,弹性件向轴承及转轴以及光栅轮施加弹力,通过摩擦轮与导丝之间滑动摩擦力大小为:
21、
22、夹紧轮,即导丝的速度大小为:
23、
24、夹紧轮,即导丝的当前位置为:
25、
26、上述公式中,v6表示旋转电机转速,mg表示导丝质量,v2表示夹紧轮转速,同时等于导丝速度,felastic表示弹性件的弹力大小,k表示弹性件的弹性系数,μ5表示导丝与摩擦轮摩擦系数,v1表示直线电机的移动速度。
27、优选的,所述导丝运行时的位置控制方法如下:
28、在导丝加速或减速运行时,为了保持滑动的差速,旋转电机同样需要加速以保证速度差满足
29、v6-v2=vm;
30、因此,旋转电机同样需要在相同运行时间内将速度v6提升至
31、
32、以保持导丝的加速度大小恒定,导丝若需要提高加速度,则控制直线电机前进,反之控制直线电机后退;
33、当需要过渡到匀速运动时,旋转电机以加速度a6将速度由v6减少至v2,则过渡时间δt为:
34、
35、优选的,所述导丝推力控制方法如下:
36、当导丝前进时遇到阻力,在不损伤血管的情况下,导丝此时失去运动前进方向的一个自由度,转而获得前进推力的一个自由度替代,则改变导丝末端的受力大小fend为:
37、
38、其中,f5表示导丝与摩擦轮的摩擦力。
39、本发明提供了一种介入手术机器人力位控制结构及其控制方法,通过直线电机和弹性件控制夹紧轮、导丝、摩擦轮三者间的压力,在匀速运动时,直线电机可以逐步后退,减少弹簧压缩量,直至达到两轮之间因出现速度差的临界位置。直线电机在匀速运行时通常停留在比临界位置略微前进,以增强系统的鲁棒性。此时虽然会在极短的时间内略有超调,但可以准确的稳定到预期的速度。此方法调节速度优点为响应速度明显会优于传统的两轮夹紧的同步转动的方法。同时能够避免传统导丝给进存在打滑的弊端。且避免预紧力过大破坏导丝涂层,或导致摩擦轮破损产生碎屑侵入患者体内的问题。
技术特征:
1.一种介入手术机器人力位控制结构,包括直线电机(1)、夹紧轮、弹性件、转轴(4)、摩擦轮(5)、旋转电机(6);
2.根据权利要求1所述的一种介入手术机器人力位控制结构,其特征在于:所述夹紧轮上设置有转速传感器。
3.根据权利要求2所述的一种介入手术机器人力位控制结构,其特征在于:所述夹紧轮采用光栅轮(2)。
4.根据权利要求2所述的一种介入手术机器人力位控制结构,其特征在于:所述旋转电机(6)上设置有编码器。
5.一种介入手术机器人力位控制方法,其特征在于,包括如下步骤:
6.根据权利要求5所述的一种介入手术机器人力位控制方法,其特征在于:所述导丝启动时的位置控制方法如下:
7.根据权利要求6所述的一种介入手术机器人力位控制方法,其特征在于:所述导丝运行时的位置控制方法如下:
8.根据权利要求7所述的一种介入手术机器人力位控制方法,其特征在于:所述导丝推力控制方法如下:
技术总结
本发明涉及机械控制技术领域,尤其涉及一种介入手术机器人力位控制结构及其控制方法,包括直线电机、夹紧轮、弹性件、转轴、摩擦轮、旋转电机;夹紧轮与转轴转动连接,且夹紧轮和转轴能够整体沿直线电机的导轨方向自由运动,弹性件的两端分别与直线电机和转轴连接;夹紧轮边缘的静摩擦系数大于摩擦轮边缘的滑动摩擦系数。本发明通过调整直线电机的位置以及旋转电机的转速,能准确控制导丝前后运动的力,速度,位置的大小,且导丝响应速度明显会优于传统的两轮夹紧的同步转动的方法,解决了现有技术无法有效的避免打滑和破坏导丝涂层,或导致摩擦轮破损产生碎屑侵入患者体内的问题。
技术研发人员:柏健,黄志俊,刘金勇,钱坤,郑泽阳
受保护的技术使用者:杭州朗博康医疗科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!