手术控制系统、方法及电子设备与流程
本发明涉及手术设备的,更具体地,涉及一种手术控制系统、方法及电子设备。
背景技术:
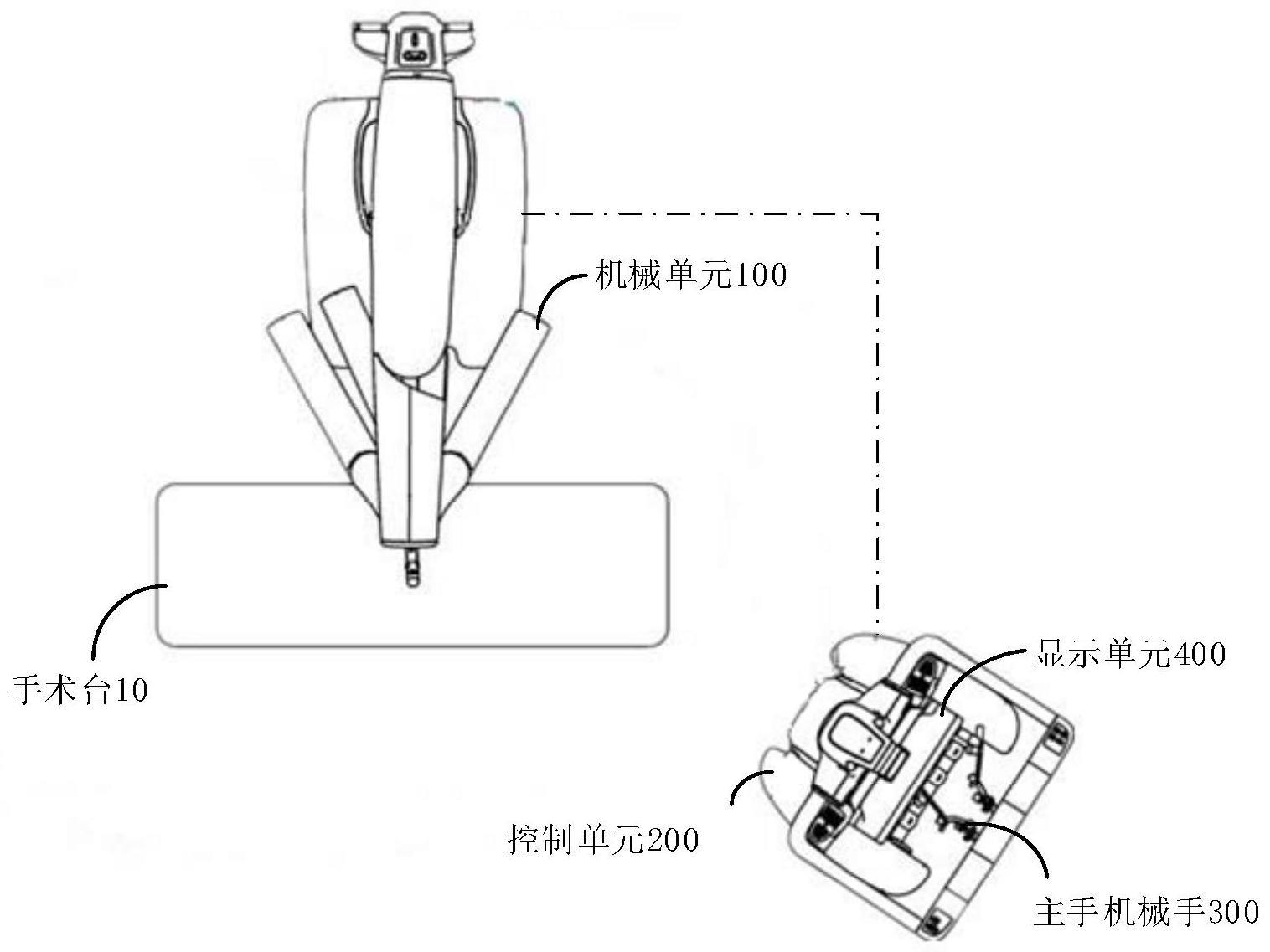
1、随着手术设备智能化的发展,手术机器人逐渐普及,手术机器人通常包括多个机械单元、控制单元以及显示单元。控制单元关联的主动机械手可以供操作人员抓握,控制单元可以将固有窥探镜的机械单元输出的画面通过显示单元展示,随后主动机械手可以通过操作人员的手部动作输出相应的操作信号。通过获得的操作信号控制其他的机械单元配合操作人员的手部动作进行操作,但在不同的手术场景下,固有窥探镜的机械单元的偏转角度有限,使得手术机器人的整体活动范围受限。
技术实现思路
1、本发明的一个目的是提供一种手术控制系统、方法及电子设备的新技术方案。
2、根据本发明的第一方面,提供了一种手术控制系统,该系统包括:控制单元;多个机械单元,所述多个机械单元包括持有窥探镜的第一机械单元;其中,在获取到所述第一机械单元被设置成用于显示画面的第一状态的情况下,所述控制单元基于预置的所述多个机械单元的相对位置,将所述所述第一机械单元相近的至少一个机械单元设置成用于被操作的第二状态。
3、可选地,所述控制单元将所述第一机械单元相远的预设数量的机械单元设置成用于辅助操作的第三状态。
4、可选地,所述多个机械单元为四个,所述处于第二状态的机械单元为两个,所述处于第三状态的机械单元为一个。
5、可选地,所述至少一个机械单元包括第二机械单元和第三机械单元;所述控制单元基于所述第二机械单元和所述第三机械单元的相对位置,生成对于所述控制单元设定的第一控制部和第二控制部的映射关系,使得不同的机械单元响应于不同的控制部输出的控制指令;其中,所述映射关系是不同的机械单元与不同的控制部一一对应的关系。
6、可选地,所述第一机械单元用于通过所述控制单元供左手操作;所述第二机械单元用于通过所述控制单元供右手操作。
7、可选地,所述控制单元是基于所述多个机械单元设定的标识确定多个机械单元分别的相对位置。
8、可选地,所述设定的标识为数字标识。
9、可选地,所述多个机械单元均为可活动的机械手臂。
10、根据本发明的第二方面,提供了一种控制方法,该方法包括:在获得对于所述多个机械单元中第一机械单元持有窥探镜的触发信号的情况下,将所述第一机械单元的当前状态更新为第一状态;根据预置的所述多个机械单元的相对位置,确定与所述第一机械单元相近的至少一个机械单元;将所述至少一个机械单元的当前状态更新为第二状态。
11、根据本发明的第三方面,提供了一种电子设备,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第二方面的控制方法的步骤。
12、根据本公开的一个实施例,在多个机械单元中的第一机械单元持有窥探镜的情况下,控制单元将第一机械单元设置成用于显示画面的第一状态,并将与第一机械单元位置相近的至少一个机械单元设置成被用户可操作的第二状态。通过上述的方式,根据操作人员设置的第一机械单元,控制单元配置不同的机械单元配合第一机械单元,使得窥探镜设置在不同的机械单元上可以较为灵活地分配不同的机械单元以适配操作人员的控制,进而扩大了窥探镜的活动范围。从而有效提高了手术机器人的整体活动范围。
13、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种手术控制系统,其特征在于,包括:
2.根据权利要求1所述的手术控制系统,其特征在于,所述控制单元将所述第一机械单元相远的预设数量的机械单元设置成用于辅助操作的第三状态。
3.根据权利要求2所述的手术控制系统,其特征在于,所述多个机械单元为四个,所述处于第二状态的机械单元为两个,所述处于第三状态的机械单元为一个。
4.根据权利要求1所述的手术控制系统,其特征在于,所述至少一个机械单元包括第二机械单元和第三机械单元;
5.根据权利要求4所述的手术控制系统,其特征在于,所述第一机械单元用于通过所述控制单元供左手操作;所述第二机械单元用于通过所述控制单元供右手操作。
6.根据权利要求1所述的手术控制系统,其特征在于,所述控制单元是基于所述多个机械单元设定的标识确定多个机械单元分别的相对位置。
7.根据权利要求6所述的手术控制系统,其特征在于,所述设定的标识为数字标识。
8.根据权利要求1所述的手术控制系统,其特征在于,所述多个机械单元均为可活动的机械手臂。
9.一种控制方法,其特征在于,应用如权利要求1至8中任一项的所述控制单元中,所述方法包括:
10.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求9所述的控制方法的步骤。
技术总结
本发明公开了一种手术控制系统、方法及电子设备,属于手术设备的技术领域,该手术控制系统包括:控制单元;多个机械单元,所述多个机械单元包括持有窥探镜的第一机械单元;其中,在获取到所述第一机械单元被设置成用于显示画面的第一状态的情况下,所述控制单元基于预置的所述多个机械单元的相对位置,将所述所述第一机械单元相近的至少一个机械单元设置成用于被操作的第二状态。
技术研发人员:肖嘉平,战梦雪,庞海峰,郭宇航
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!