一种消化内镜推送机器人的制作方法
本发明涉及医疗器械,尤其涉及一种消化内镜推送机器人。
背景技术:
1、消化内镜是经消化道直接获取图像或经附带超声及x线的设备获取消化道及消化器官的超声或x线影像,以诊断和治疗消化系统疾病的一组设备。按检查所用内镜属性可分为食管镜、胃镜、十二指肠镜、结肠镜、小肠镜、内镜超声、胶囊内镜、胆道镜(包括子母镜)、胰管镜和腹腔镜以及激光共聚焦内镜等;按检查部位和功能分为上消化道内镜、下消化道内镜、内镜逆行胰胆管造影(ercp)及内镜超声;按临床应用分为诊断性消化内镜和治疗性消化内镜,消化内镜的结构中包括光学和机械两部分,其中光学部分由导像束、导光束、目镜、物镜及盖玻片组成,机械部分则由操作部的角度钮、角度钢丝、各种内管道及外套管等组成,使用时,首先将消化内镜沿人体腔道伸入患者体内,然后将手术器械插入消化内镜的器械通道中,并沿器械通道运动至病变位置;
2、但是目前现有的消化内镜通常是人工进行操纵,无法做到精准的调节,进而会降低手术作业时的稳定性,且进行治疗时往往需要医护人员手持消化内镜进行小幅度操作,对推送消化内镜组件时容易过度造成患者粘膜医源性损伤,具有缺陷性。
技术实现思路
1、本发明提供了一种消化内镜推送机器人,以解决现有的消化内镜操作方式无法做到精准调节的问题。
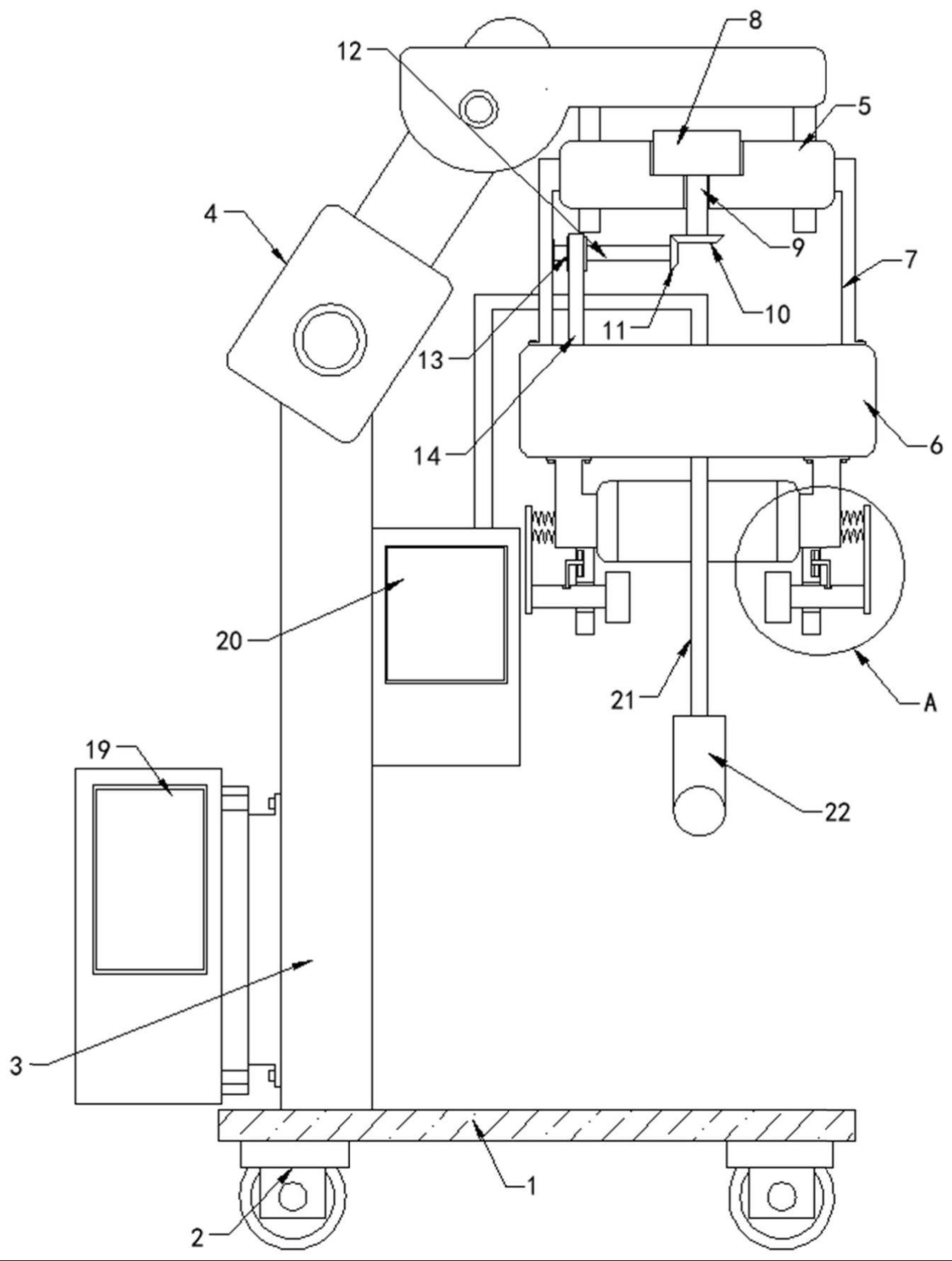
2、为了解决上述问题,本发明提供了一种消化内镜推送机器人,其包括:底板、支撑柱、机械臂,支撑板、驱动组件、支撑框、支撑杆、推送轮、平齿轮、机体、导线和镜头;支撑柱设置于底板的顶部,机械臂的一端与支撑柱的顶部连接,机械臂的另一端的底部与支撑板连接,驱动组件设置于支撑板上,支撑框的两端与支撑板的底部固定连接,支撑框内转动连接有对称设置的两根支撑杆,支撑杆上均固定套接推送轮,且两根支撑杆的同一端均固定连接平齿轮,且两个平齿轮相互咬合,其中一根支撑杆与驱动组件的输出端连接,机体设置在支撑柱上,导线的一端与机体连接且另一端上设置镜头,且导线上设置镜头的一端穿过两个推送轮中间并延伸。
3、作为本发明的进一步改进,支撑框与支撑板之间通过牵引板连接。
4、作为本发明的进一步改进,驱动组件包括电机、转杆、第一锥齿轮、第二锥齿轮、连接杆、主动轮、连接带和从动轮,电机的输出端固定连接转杆,转杆的底端贯穿支撑板并固定连接第一锥齿轮,第一锥齿轮的一侧与第二锥齿轮相啮合,第二锥齿轮的一侧固定连接连接杆,连接杆的一端与一个牵引板转动连接,连接杆上固定套接主动轮,主动轮上套接连接带的一端,一个支撑杆上固定套接从动轮,连接带的另一端套接在从动轮上。
5、作为本发明的进一步改进,其还包括控制器,控制器用于驱动机械臂。
6、作为本发明的进一步改进,推送轮中端处设有限位槽。
7、作为本发明的进一步改进,其还包括导向筒和定位板,定位板的一端与支撑框固定连接,定位板的另一端套接导向筒。
8、作为本发明的进一步改进,定位板的底部固定连接有竖板,竖板上滑动插设有滑杆,滑杆的一端固定连接有卡合板,卡合板上设有安装槽,安装槽内设有吸水棉,卡合板的另一侧固定插设有与安装槽连通的进液管,进液管上插设有封堵塞,滑杆的另一端固定连接有挤压板,挤压板的一侧与定位板之间固定连接有多个弹簧,竖板的一侧设有凹槽,凹槽内固定连接有导杆,导杆上滑动套接有“l”型卡杆,滑杆上设有与“l”型卡杆对应的卡槽。
9、作为本发明的进一步改进,底板的底部设置有移动轮。
10、相比于现有技术,本发明的消化内镜推送机器人通过驱动机械臂运转从而将支撑框移动至患者上方,再通过驱动组件驱动支撑杆转动,支撑杆将带动两个平齿轮相互咬合实现两个推送轮相互转动,从而通过将机体上的导线穿过两个推送轮之间,利用旋转的推送轮带动导线运动进而对导线一端上的镜头进行小幅度的推送,实现对镜头的精准调节,避免造成患者粘膜医源性损伤。
技术特征:
1.一种消化内镜推送机器人,其特征在于,其包括:底板、支撑柱、机械臂,支撑板、驱动组件、支撑框、支撑杆、推送轮、平齿轮、机体、导线和镜头;
2.根据权利要求1所述的消化内镜推送机器人,其特征在于,所述支撑框与所述支撑板之间通过牵引板连接。
3.根据权利要求2所述的消化内镜推送机器人,其特征在于,所述驱动组件包括电机、转杆、第一锥齿轮、第二锥齿轮、连接杆、主动轮、连接带和从动轮,所述电机的输出端固定连接所述转杆,所述转杆的底端贯穿所述支撑板并固定连接所述第一锥齿轮,所述第一锥齿轮的一侧与所述第二锥齿轮相啮合,所述第二锥齿轮的一侧固定连接所述连接杆,所述连接杆的一端与一个所述牵引板转动连接,所述连接杆上固定套接所述主动轮,所述主动轮上套接所述连接带的一端,一个所述支撑杆上固定套接所述从动轮,所述连接带的另一端套接在所述从动轮上。
4.根据权利要求1所述的消化内镜推送机器人,其特征在于,其还包括控制器,所述控制器用于驱动所述机械臂。
5.根据权利要求1所述的消化内镜推送机器人,其特征在于,所述推送轮中端处设有限位槽。
6.根据权利要求1所述的消化内镜推送机器人,其特征在于,其还包括导向筒和定位板,所述定位板的一端与所述支撑框固定连接,所述定位板的另一端套接所述导向筒。
7.根据权利要求1所述的消化内镜推送机器人,其特征在于,所述定位板的底部固定连接有竖板,所述竖板上滑动插设有滑杆,所述滑杆的一端固定连接有卡合板,所述卡合板上设有安装槽,所述安装槽内设有吸水棉,所述卡合板的另一侧固定插设有与所述安装槽连通的进液管,所述进液管上插设有封堵塞,所述滑杆的另一端固定连接有挤压板,所述挤压板的一侧与所述定位板之间固定连接有多个弹簧,所述竖板的一侧设有凹槽,所述凹槽内固定连接有导杆,所述导杆上滑动套接有“l”型卡杆,所述滑杆上设有与所述“l”型卡杆对应的卡槽。
8.根据权利要求1所述的消化内镜推送机器人,其特征在于,所述底板的底部设置有移动轮。
技术总结
本发明公开了一种消化内镜推送机器人,其包括:底板、支撑柱、机械臂,支撑板、驱动组件、支撑框、支撑杆、推送轮、平齿轮、机体、导线和镜头;支撑柱设置于底板的顶部,机械臂一端与支撑柱顶部连接,机械臂另一端的底部与支撑板连接,驱动组件设置于支撑板上,支撑框的两端与支撑板的底部连接,支撑框内转动连接有对称设置的两根支撑杆,支撑杆上均套接推送轮,且两根支撑杆的同一端均连接平齿轮,且两个平齿轮相互咬合,其中一根支撑杆与驱动组件的输出端连接,机体设置在支撑柱上,导线的一端与机体连接且另一端上设置镜头,且导线上设置镜头的一端穿过两个推送轮中间并延伸。本发明通过驱动推送轮转动以驱动导线带动镜头进行精细化操作。
技术研发人员:李文超,刘云云,辜嘉,李凌,张永亮
受保护的技术使用者:苏州中科先进技术研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!