水下机器人穿刺结构及其穿刺针的制作方法
本技术涉及水下作业,特别是一种水下机器人穿刺结构。
背景技术:
1、在水下救援或水下打捞过程中,在发生事故后人或动物尸体沉到水下,需由深水区打捞至陆地上,而尸体在水下腐烂产生气体,水面压力小可能会导致尸体发生爆破,因此,在打捞时在一定深度如100米就需要放气,将尸体内气体放出。
技术实现思路
1、本实用新型的发明目的是,针对上述问题,提供了一种水下机器人穿刺结构,可以外推针体扎入尸体连通外界以放气。
2、为达到上述目的,本实用新型所采用的技术方案是:
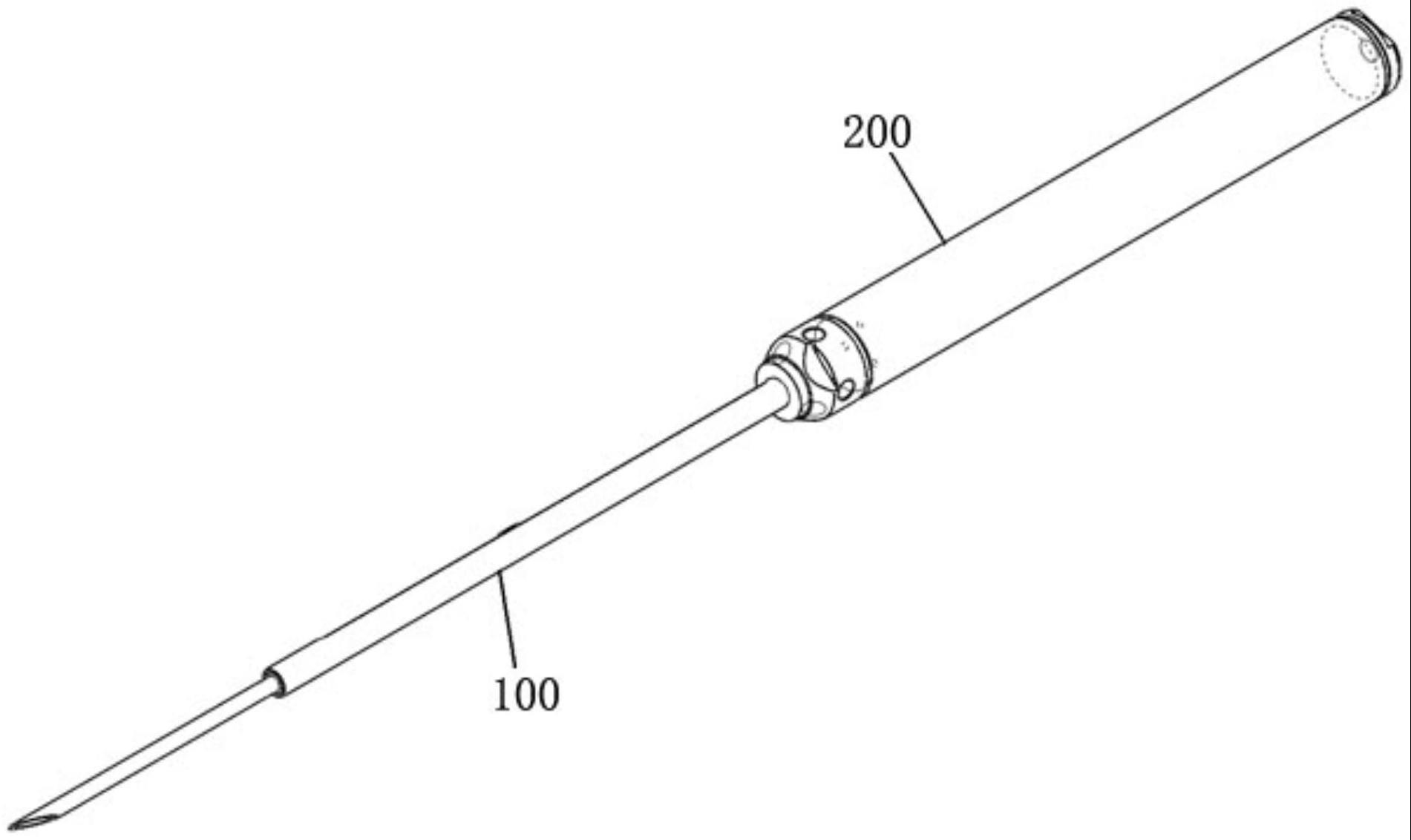
3、水下机器人穿刺结构,包括配置于机器人的推进臂及穿刺针本体,穿刺针本体包括连接件、管支架体、承接件及针体,管支架体的i端设置有连接件,以使得管支架体能够连接在机器人推进臂上;针体可滑动的穿置于管支架体内,且在外力作用下针体的尖端能够穿出管支架体的ii端,针体的固定端设置有承接件,以使得针体能够可拆卸连接至推进臂的推进丝杆上;针体的固定端上设置有排气孔,管支架体的侧壁上设置有连通孔,且排气孔、连通孔与针体的尖端的针孔相互连通。
4、其中,推进臂包括推进丝杆、铰头、电机、电池及主腔体;铰头及电机设置于主腔体内,电机经铰头带动推进丝杆转动;电池设置于主腔体内且位于主腔体的后端,电机及铰头位于主腔体的前端,主腔体的前端设置有机体前堵头,主腔体的后端设置有尾部堵头,连接件连接在机体前堵头上。
5、如上述,在推进臂上连接有穿刺针本体,在推进丝杆的作用下,外推针体穿出管支架体扎入尸体,通过针孔、排气孔及排气孔连通外界,进而在压差作用下实现放气。
6、作为一选项,承接件的外壁上设置有径向外凸的凸起,连通孔为沿轴向延伸的条形孔,条形孔的宽度与凸起适配,如此,可以起到限位作用,防止其周向转动;且,排气孔处于条形孔的径向面上,且在针体穿出至大长度情形下排气孔正对条形孔的远离连接件端,气体经排气孔出来后直接经条形孔向外排放,避免管支架体内腔转向及阻塞。
7、作为一选项,承接件为采用螺纹连接的推进螺母,且推进螺母的外壁宽度与管支架体的内壁相适配。在装配时,承接件位于管支架体内腔,采用螺纹连接,便于在管支架体内腔内安装及拆卸。
8、作为一选项,穿刺针本体还包括滑动轴承,滑动轴承设置于针体的中部,且滑动轴承的外壁宽度与管支架体的内壁相适配,如此,起到滑动连接及限位作用,防止针体尖端刮碰管支架内壁而磨损;且,管支架体的ii端端部收缩形成能够穿出针体的穿出孔,穿出孔的宽度小于滑动轴承的外壁宽度,如此,起到限位作用,防止针体伸出过度而无法回收。
9、由于采用上述技术方案,本实用新型具有以下有益效果:
10、本实用新型的水下机器人穿刺结构,在推进臂上连接有穿刺针本体,在推进丝杆的作用下,外推针体穿出管支架体扎入尸体,通过针孔、排气孔及排气孔连通外界,进而在压差作用下实现放气。
技术特征:
1.一种水下机器人穿刺结构的穿刺针,其特征在于:包括连接件、管支架体、承接件及针体,所述管支架体的i端设置有连接件,以使得管支架体能够连接在机器人推进臂上;所述针体可滑动的穿置于管支架体内,且在外力作用下针体的尖端能够穿出管支架体的ii端,所述针体的固定端设置有承接件,以使得针体能够可拆卸连接至推进臂的推进丝杆上;所述针体的固定端上设置有排气孔,所述管支架体的侧壁上设置有连通孔,且排气孔、连通孔与针体的尖端的针孔相互连通。
2.根据权利要求1所述的水下机器人穿刺结构的穿刺针,其特征在于:所述承接件的外壁上设置有径向外凸的凸起,连通孔为沿轴向延伸的条形孔,条形孔的宽度与凸起适配;且,排气孔处于条形孔的径向面上,且在针体穿出至大长度情形下排气孔正对条形孔的远离连接件端。
3.根据权利要求1所述的水下机器人穿刺结构的穿刺针,其特征在于:所述承接件为采用螺纹连接的推进螺母,且推进螺母的外壁宽度与管支架体的内壁相适配。
4.根据权利要求1所述的水下机器人穿刺结构的穿刺针,其特征在于:还包括滑动轴承,滑动轴承设置于针体的中部,且滑动轴承的外壁宽度与管支架体的内壁相适配。
5.根据权利要求4所述的水下机器人穿刺结构的穿刺针,其特征在于:所述管支架体的ii端端部收缩形成能够穿出针体的穿出孔,穿出孔的宽度小于滑动轴承的外壁宽度。
6.一种水下机器人穿刺结构,包括配置于机器人的推进臂,其特征在于:还包括穿刺针本体,所述穿刺针本体包括连接件、管支架体、承接件及针体,所述管支架体的i端设置有连接件,以使得管支架体能够连接在推进臂上;所述针体可滑动的穿置于管支架体内,且在外力作用下针体的尖端能够穿出管支架体的ii端,所述针体的固定端设置有承接件,以使得针体能够可拆卸连接至推进臂的推进丝杆上;所述针体的固定端上设置有排气孔,所述管支架体的侧壁上设置有连通孔,且排气孔、连通孔与针体的尖端的针孔相互连通。
7.根据权利要求6所述的水下机器人穿刺结构,其特征在于:所述推进臂包括推进丝杆、铰头、电机、电池及主腔体;铰头及电机设置于主腔体内,电机经铰头带动推进丝杆转动;电池设置于主腔体内且位于主腔体的后端,主腔体的前端设置有机体前堵头,主腔体的后端设置有尾部堵头,连接件连接在机体前堵头上。
8.根据权利要求6所述的水下机器人穿刺结构,其特征在于:所述承接件的外壁上设置有径向外凸的凸起,连通孔为沿轴向延伸的条形孔,条形孔的宽度与凸起适配;且,排气孔处于条形孔的径向面上,且在针体穿出至大长度情形下排气孔正对条形孔的远离连接件端。
9.根据权利要求7所述的水下机器人穿刺结构,其特征在于:所述承接件为采用螺纹连接的推进螺母,且推进螺母的外壁宽度与管支架体的内壁相适配。
10.根据权利要求6所述的水下机器人穿刺结构,其特征在于:所述穿刺针本体还包括滑动轴承,滑动轴承设置于针体的中部,且滑动轴承的外壁宽度与管支架体的内壁相适配;且,管支架体的ii端端部收缩形成能够穿出针体的穿出孔,穿出孔的宽度小于滑动轴承的外壁宽度。
技术总结
本技术公开了一种水下机器人穿刺结构及其穿刺针,穿刺针本体包括连接件、管支架体、承接件及针体,管支架体的I端设置有连接件,以使得管支架体能够连接在机器人推进臂上;针体可滑动的穿置于管支架体内,且在外力作用下针体的尖端能够穿出管支架体的II端,针体的固定端设置有承接件,以使得针体能够可拆卸连接至推进臂的推进丝杆上;针体的固定端上设置有排气孔,管支架体的侧壁上设置有连通孔,且排气孔、连通孔与针体的尖端的针孔相互连通。本技术在推进臂上连接有穿刺针本体,在推进丝杆的作用下,外推针体穿出管支架体扎入尸体,通过针孔、排气孔及排气孔连通外界,进而在压差作用下实现放气。
技术研发人员:赖俊翔,梁智勇,许铭本,张荣灿,杨欣,曹俊
受保护的技术使用者:广西向海科技发展有限公司
技术研发日:20220223
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!