一种多模式膝关节康复机械手
本技术涉及医疗器材领域,特别涉及多模式膝关节康复机械手。
背景技术:
1、膝关节是人体最重要的运动器官之一,然而在脑中风以及各种意外事故中都有可能会导致膝关节以及半月板受损,将会对生活带来极大的不便。病人在进行必要的医疗手段治疗康复之后,就是对膝关节的康复训练,康复训练就包括股四头肌等长收缩训练,屈曲训练等。但是现有的康复训练师的数量远远不能满足病人的需求,且目前存在的膝关节康复装置比较昂贵,体积大不方便;康复机器人将康复工程和机器人技术相结合,是近年来出现的一种新型机器人,属于医疗机器人范畴:所以采用轻型膝关节康复训练装置代替人工对患者进行下肢康复训练是一种行之有效的方法,本文将要介绍一种专门针对膝关节康复训练的机械手,此机械手不仅可以提供膝关节康复训练还是一种轻型化的装置,可以提供多种模式。因此,进行膝关节康复机械手的研究与设计,将会大大提高患者的生活质量。
2、国内对下肢关节康复训练系统的研究起步较晚,但也取得了较好效果,先后开发了下肢外骨骼康复训练机器人、下肢康复助行系统、卧式踏板下肢康复机器人和踏车式肢体训练器等系统或装置。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种多模式膝关节康复机械手,方便使用,更好的帮助患者进行膝关节康复以解决现有技术中导致的上述多项缺陷。
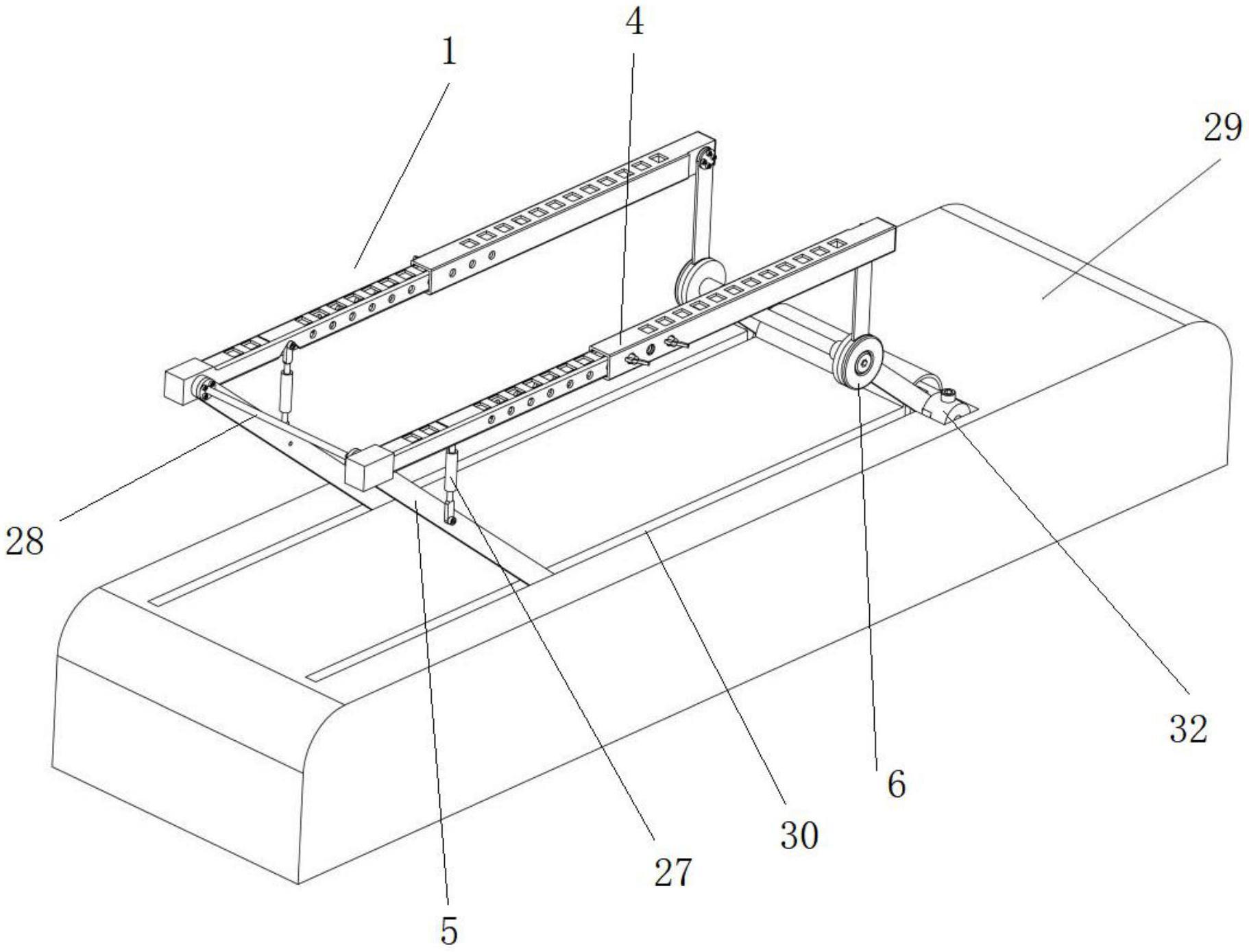
2、为调节上述目的,本实用新型提供以下的技术方案:一种多模式膝关节康复机械手,包括两组结构一致的双连杆机构和驱动机构,患者的腿部固定在两组双连杆机构之间;所述驱动机构设置在底板上,双连杆机构由第一连杆和第二连杆铰接而成,第二连杆的端部与驱动机构铰接,第一连杆的端部通过腿部随停装置与底座相连接,腿部随停装置的两端分别与第一连杆和底座铰接;使用时该装置竖直放置,踝关节位于在双连杆机构的铰接处,将小腿固定在第一连杆上;该腿部随停装置包括上连接板和下连接板,上连接板与下链接板的铰接处分别设有转盘和转环,转环套在转盘上,转盘的中心位置设有圆柱槽,圆柱槽内设有定位支架,支架上设有插孔,该装置还包括盖板,该盖板为与转盘相匹配的圆形盖板,盖板内侧设有与圆柱槽相匹配的圆柱凸台,圆柱凸台对应插孔设有凸起,盖板的边部分别设有两个定位块,定位块的内侧设有与上连接板或者下连接板相匹配的定位槽,底座上设有与下连接板铰接的铰接座,固定下连接板的定位块内设有可抽拉的定位板,铰接座上再与定位板同一水平面上设有插槽,定位板可放置在插槽内。
3、优选的,所述第一连杆包括伸缩内杆和伸缩外杆,伸缩外杆内设有滑槽,伸缩内杆卡在滑槽内,伸缩外杆相对于伸缩内杆移动一端的侧壁设有定位孔,伸缩杆内杆相对于伸缩外杆移动一端的侧壁沿轴线方向等间距设有螺纹孔,由螺栓穿过定位孔与螺纹孔螺纹连接,调节第一连杆的伸缩长度。
4、优选的,所述驱动机构为滚珠丝杆副,该滚珠丝杆副的两侧设有滑轨,滚珠丝杆副的螺母两侧对称设有滑块,滑块沿着滑轨滑动,且滑块与第二连杆铰接。
5、优选的,所述双连杆的铰接处在第一连杆和第二连杆之间设有伸缩支撑杆。
6、优选的,两个双连杆机构之间设有加强杆。
7、优选的,所述底座上方设有包裹整个装置的防护盖,该防护盖在与双连杆机构重叠的竖直面上设有行程槽,用于第二连杆在行程槽内运动,其中,铰接座与下连接板的铰接处位于防护盖上方。
8、采用以上技术方案的有益效果是:本实用新型中双连杆机构和腿部随停装置组成四连杆机械结构,可以很好的模拟医生对病人腿部施加的力,并带动病人腿部完成相应的康复动作,结构相对简单,大大降低生产制造成本。同时腿部随停装置可以选择模拟两种训练模式,进行屈曲训练或股四头肌等长收缩训练。
技术特征:
1.一种多模式膝关节康复机械手,其特征在于,包括两组结构一致的双连杆机构和驱动机构,患者的腿部固定在两组双连杆机构之间;所述驱动机构设置在底板上,双连杆机构由第一连杆和第二连杆铰接而成,第二连杆的端部与驱动机构铰接,第一连杆的端部通过腿部随停装置与底座相连接,腿部随停装置的两端分别与第一连杆和底座铰接;使用时该装置竖直放置,踝关节位于在双连杆机构的铰接处,将小腿固定在第一连杆上;该腿部随停装置包括上连接板和下连接板,上连接板与下链接板的铰接处分别设有转盘和转环,转环套在转盘上,转盘的中心位置设有圆柱槽,圆柱槽内设有定位支架,支架上设有插孔,该装置还包括盖板,该盖板为与转盘相匹配的圆形盖板,盖板内侧设有与圆柱槽相匹配的圆柱凸台,圆柱凸台对应插孔设有凸起,盖板的边部分别设有两个定位块,定位块的内侧设有与上连接板或者下连接板相匹配的定位槽,底座上设有与下连接板铰接的铰接座,固定下连接板的定位块内设有可抽拉的定位板,铰接座上再与定位板同一水平面上设有插槽,定位板可放置在插槽内。
2.根据权利要求1所述的多模式膝关节康复机械手,其特征在于,所述第一连杆包括伸缩内杆和伸缩外杆,伸缩外杆内设有滑槽,伸缩内杆卡在滑槽内,伸缩外杆相对于伸缩内杆移动一端的侧壁设有定位孔,伸缩杆内杆相对于伸缩外杆移动一端的侧壁沿轴线方向等间距设有螺纹孔,由螺栓穿过定位孔与螺纹孔螺纹连接,调节第一连杆的伸缩长度。
3.根据权利要求1所述的多模式膝关节康复机械手,其特征在于,所述驱动机构为滚珠丝杆副,该滚珠丝杆副的两侧设有滑轨,滚珠丝杆副的螺母两侧对称设有滑块,滑块沿着滑轨滑动,且滑块与第二连杆铰接。
4.根据权利要求1所述的多模式膝关节康复机械手,其特征在于,所述双连杆的铰接处在第一连杆和第二连杆之间设有伸缩支撑杆。
5.根据权利要求1所述的多模式膝关节康复机械手,其特征在于,两个双连杆机构之间设有加强杆。
6.根据权利要求1所述的多模式膝关节康复机械手,其特征在于,所述底座上方设有包裹整个装置的防护盖,该防护盖在与双连杆机构重叠的竖直面上设有行程槽,用于第二连杆在行程槽内运动,其中,铰接座与下连接板的铰接处位于防护盖上方。
技术总结
本技术公开了一种多模式膝关节康复机械手,包括两组结构一致的双连杆机构和驱动机构,患者的腿部固定在两组双连杆机构之间;所述驱动机构设置在底板上,双连杆机构由第一连杆和第二连杆铰接而成,第二连杆的端部与驱动机构铰接,第一连杆的端部通过腿部随停装置与底座相连接,腿部随停装置的两端分别与第一连杆和底座铰接;使用时该装置水平放置,病人坐卧于装置旁,踝关节位于在双连杆机构的铰接处,将小腿固定在第一连杆上;可以很好的模拟医生对病人腿部施加的力,并带动病人腿部完成相应的康复动作,结构相对简单,方便使用。
技术研发人员:范敬松,杨怀安,杨凯凯,陶文博,邹令令,冯赛龙,方华杰,邸志民,张含真,钟相强
受保护的技术使用者:安徽工程大学
技术研发日:20220330
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!