可直接驱动的后助力智能驱动器的制作方法
1.本实用新型涉及轮椅技术领域,尤其涉及可直接驱动的后助力智能驱动器。
背景技术:
2.轮椅是康复的重要工具,它不仅是肢体伤残者的代步工具,更重要的是使他们借助于轮椅进行身体锻炼和参与社会活动,所以人们对轮椅的灵活性要求也越来越高。
3.在本申请人在先的申请文件中,公开号为:cn208659738u,公开了一种后助力智能驱动器,包括万向轮、壳体、轮毂、驱动该轮毂转动的电动驱动机构、蓄电池、控制器,通过该后助力智能驱动器将万向轮与壳体等部件装配成一体形成的后助力智能驱动器安装在运输工具的后部,后助力智能驱动器与地面形成接触,当后助力智能驱动器启动后,对运输工具产生辅助的驱动作用力帮助运输工具行驶,以减轻乘座在运输工具上人员通过手动操作方式驱动运输工具的负担。且在该后助力智能驱动器的控制器中,控制器包括直流电源、安装在电动驱动机构上的霍尔检测模块、处理器和驱动器,处理器根据霍尔检测模块提供的检测信号,计算万向轮在摩擦作用力下的转速以得到轮椅当前的行驶速度,并将所述转速与处理器内设置的阈值进行比较,根据比较结果,以发出向电动驱动机构提供所需工作电流的指令信号,控制电动驱动机构,实现轮椅速度的控制。为了进一步完善该后助力智能驱动器的控制方式,我们提出了一种可直接驱动的后助力智能驱动器。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的可直接驱动的后助力智能驱动器。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.可直接驱动的后助力智能驱动器,包括驱动器本体以及设置在驱动器本体外部的主动控制器,主动控制器与驱动器本体电连接,所述主动控制器包括安装块,所述安装块上设置有电源开关、调速开关、电量显示屏和急停开关,电源开关、调速开关、电量显示屏和急停开关通过导线与驱动器本体电性连接,电源开关、调速开关和急停开关相串联。
7.优选的,所述驱动器本体包括壳体以及转动设置在壳体下端的滚轮,壳体内部设置有电动驱动机构,通过电动驱动机构能够带动滚轮转动。
8.优选的,所述主动控制器与电动驱动机构电性连接,通过主动控制器能够手动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态。
9.优选的,所述壳体内部还设置有自动控制器,自动控制器能够自动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态。
10.优选的,当主动控制器处于运行状态时,自动控制器处于关闭状态。
11.优选的,所述自动控制器包括动力调整单元以及防护单元,通过动力调整单元自动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态,通过防护单元用于监测驱动器本体的运行状态,监测结果异常时,对驱动器本体中的电动驱动机构进行快
速的调整。
12.优选的,当主动控制器处于运行状态时,自动控制器中的动力调整单元处于关闭状态,自动控制器中的防护单元处于开启状态。
13.优选的,所述安装块的下端设置有紧固带。
14.本实用新型的有益效果是:
15.1、该后助力智能驱动器中,可以单独的设置主动控制机构,能够进一步简化驱动器本体的调节操作,可以通过调速开关对驱动器本体的运行速度进行调整,通过急停开关进行快速制动,提高轮椅整体的安全性,且能够降低生产成本。
16.2、该后助力智能驱动器中,也可以将主动控制机构配合自动控制机构配合使用,完善驱动器本体的调节功能,用户根据需要合理的选择控制方式,便于轮椅的使用。
附图说明
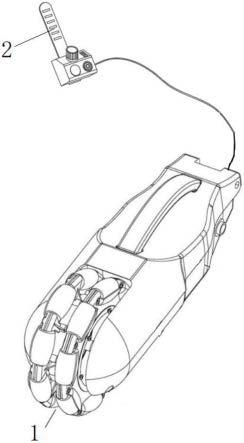
17.图1为本实用新型提出的可直接驱动的后助力智能驱动器的立体结构示意图;
18.图2为本实用新型提出的可直接驱动的后助力智能驱动器的主动控制器的结构示意图;
19.图3为本实用新型提出的可直接驱动的后助力智能驱动器的安装在轮椅上的结构示意图。
20.图中:1驱动器本体、2主动控制器、3轮椅、21安装块、22电源开关、23调速开关、24电量显示屏、25急停开关、26导线、27紧固带。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.实施例1中,参照图1-3,可直接驱动的后助力智能驱动器,包括驱动器本体1以及设置在驱动器本体1外部的主动控制器2,主动控制器2与驱动器本体1电连接,主动控制器2包括安装块21,安装块21上设置有电源开关22、调速开关23、电量显示屏24和急停开关25,电源开关22、调速开关23、电量显示屏24和急停开关25通过导线26与驱动器本体1电性连接,电源开关22、调速开关23和急停开关25相串联,安装块21的下端设置有紧固带27,通过紧固带27将安装块21安装在轮椅3上。
23.驱动器本体1包括壳体以及转动设置在壳体下端的滚轮,壳体内部设置有电动驱动机构,通过电动驱动机构能够带动滚轮转动。
24.主动控制器2与电动驱动机构电性连接,通过主动控制器2能够手动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态,通过调速开关23能够改变经过电动驱动机构电流的大小,从而实现调试的目的,主动控制器2的内部安装有蓄电池,蓄电池的电量通过电量显示屏24。
25.壳体内部还设置有自动控制器,自动控制器能够自动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态,当主动控制器2处于运行状态时,自动控制器处于关闭状态。
26.实施例2中,自动控制器包括动力调整单元以及防护单元,通过动力调整单元自动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态,通过防护单元用于监测驱动器本体1的运行状态,监测结果异常时,对驱动器本体1中的电动驱动机构进行快速的调整,当驱动器本体1运行过快时,超过限定速度时,通过防护单元对驱动器本体1进行降速或者制动,当驱动器本体1处于具有坡度路面时,轮椅3倒退时,通过防护单元控制驱动器本体1进行加速。
27.当主动控制器2处于运行状态时,自动控制器中的动力调整单元处于关闭状态,自动控制器中的防护单元处于开启状态,在主动控制器2运行时,防护单元进行辅助防护,提高装置的安全性。
28.实施例1-2中,该后助力智能驱动器中,也可以将主动控制机构2配合自动控制机构配合使用,完善驱动器本体1的调节功能,用户根据需要合理的选择控制方式,便于轮椅3的使用。
29.实施例3中,该后助力智能驱动器中,可以单独的设置主动控制机构2,能够进一步简化驱动器本体1的调节操作,可以通过调速开关23对驱动器本体1的运行速度进行调整,通过急停开关25进行快速制动,提高轮椅3整体的安全性,且能够降低生产成本。
30.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.可直接驱动的后助力智能驱动器,包括驱动器本体(1)以及设置在驱动器本体(1)外部的主动控制器(2),主动控制器(2)与驱动器本体(1)电连接,其特征在于,所述主动控制器(2)包括安装块(21),所述安装块(21)上设置有电源开关(22)、调速开关(23)、电量显示屏(24)和急停开关(25),电源开关(22)、调速开关(23)、电量显示屏(24)和急停开关(25)通过导线(26)与驱动器本体(1)电性连接,电源开关(22)、调速开关(23)和急停开关(25)相串联。2.根据权利要求1所述的可直接驱动的后助力智能驱动器,其特征在于,所述驱动器本体(1)包括壳体以及转动设置在壳体下端的滚轮,壳体内部设置有电动驱动机构,通过电动驱动机构能够带动滚轮转动。3.根据权利要求2所述的可直接驱动的后助力智能驱动器,其特征在于,所述主动控制器(2)与电动驱动机构电性连接,通过主动控制器(2)能够手动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态。4.根据权利要求3所述的可直接驱动的后助力智能驱动器,其特征在于,所述壳体内部还设置有自动控制器,自动控制器能够自动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态。5.根据权利要求4所述的可直接驱动的后助力智能驱动器,其特征在于,所述自动控制器包括动力调整单元以及防护单元,通过动力调整单元自动的改变经过电动驱动机构电流的大小,改变电动驱动机构的运行状态,通过防护单元用于监测驱动器本体(1)的运行状态,监测结果异常时,对驱动器本体(1)中的电动驱动机构进行快速的调整。6.根据权利要求1所述的可直接驱动的后助力智能驱动器,其特征在于,所述安装块(21)的下端设置有紧固带(27)。
技术总结
本实用新型涉及轮椅技术领域,尤其涉及可直接驱动的后助力智能驱动器,包括驱动器本体以及设置在驱动器本体外部的主动控制器,主动控制器与驱动器本体电连接,所述主动控制器包括安装块,所述安装块上设置有电源开关、调速开关、电量显示屏和急停开关,电源开关、调速开关、电量显示屏和急停开关通过导线与驱动器本体电性连接,电源开关、调速开关和急停开关相串联,该后助力智能驱动器中,可以单独的设置主动控制机构,能够进一步简化驱动器本体的调节操作,可以通过调速开关对驱动器本体的运行速度进行调整,通过急停开关进行快速制动,提高轮椅整体的安全性,且能够降低生产成本。且能够降低生产成本。且能够降低生产成本。
技术研发人员:赵明远 陈小平
受保护的技术使用者:常州安耐雅康复器材有限公司
技术研发日:2022.04.24
技术公布日:2023/2/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1