一种手术机器人系统专用单摆式修补器的制作方法
本技术涉及一种手术机器人系统专用单摆式修补器。
背景技术:
1、疝修补器的主要作用是将修补专用钉锚定在修补区域内的组织壁,以此将预先贴附于疝环处的补片固定于组织壁表面。手持式疝修补器在疝修补手术过程中,依靠多名医护人员配合,完成修补程序。
2、手持式操作方式在一定程度上限制了它的发展,在更为先进的远程操控型手术方案中,这种手持式设计使其无法融入机器人系统。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺陷,提供一种手术机器人系统专用单摆式修补器。
2、为实现上述目的,本实用新型采用了如下技术方案:
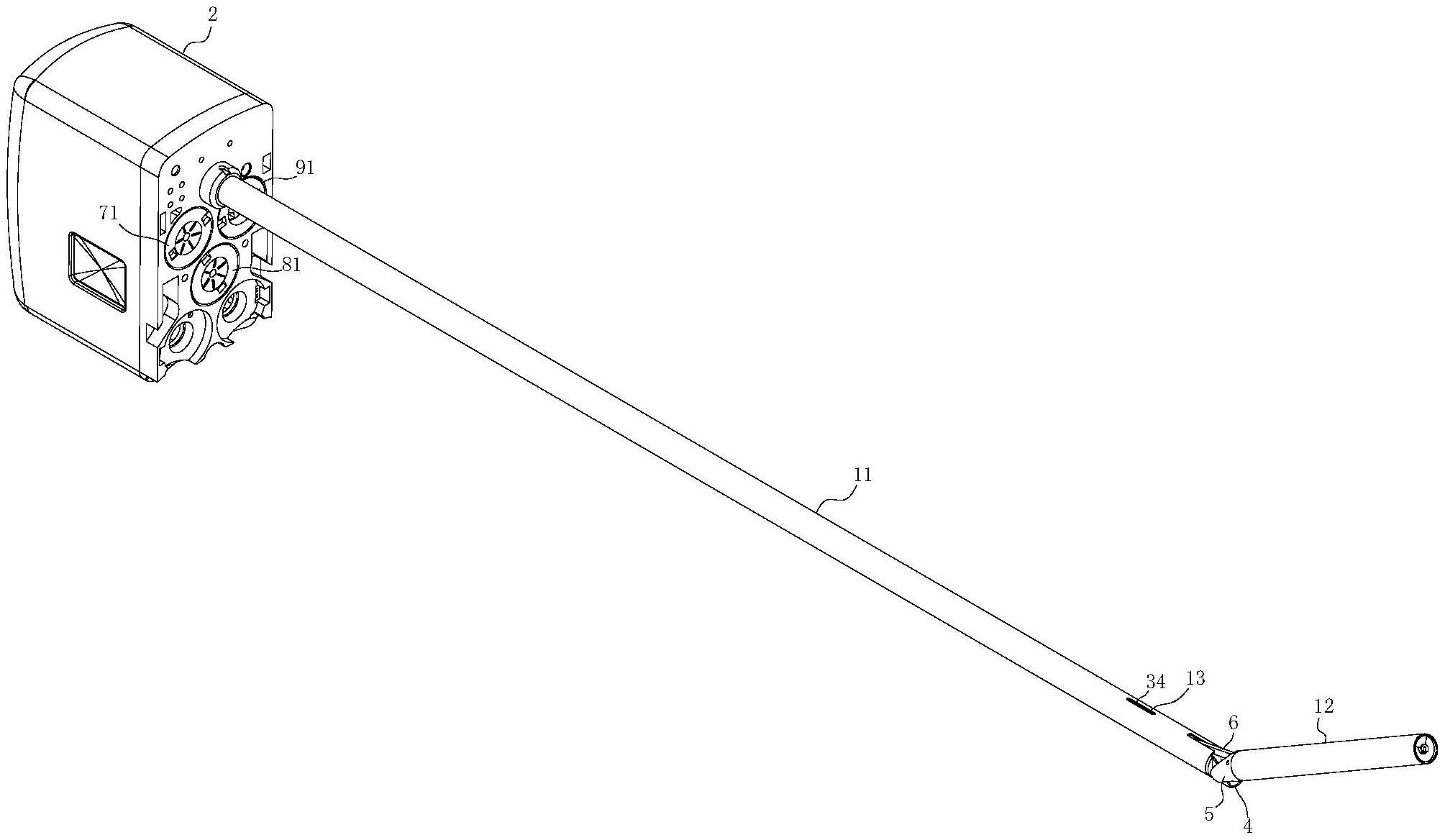
3、一种手术机器人系统专用单摆式修补器,包括器身管以及位于器身管内部的用于向疝修补区锚定疝修补钉的送钉机构,所述器身管的一端连接有能够与手术机器人系统相对接的配置器;所述器身管设置有单摆式弯转机构,所述单摆式弯转机构包括与器身管固定连接的单摆关节、与所述单摆关节相连的推拉管以及与所述推拉管的近端相连的推拉管致动机构;所述推拉管插装在器身管内,推拉管的近端固定设置有近端接头,所述近端接头通过外螺纹与推拉螺帽中部的内螺纹相连;所述推拉管的远端固定设置有远端接头,远端接头固定设置有止转销,器身管上设置有与所述止转销相对应的止转孔,所述止转孔沿着器身管的长度方向延伸,所述止转销插装在止转孔内;所述单摆关节包括与推拉管相固定的公接头、与器身管相固定的母接头以及推拉连片,公接头与母接头之间相铰接,所述推拉连片的两端分别与母接头和远端接头相铰接,公接头与母接头之间能够绕铰接轴进行转动;配置器设置有卡盘一,所述卡盘一通过传动齿轮与推拉螺帽的外部齿轮相连;在使用时,卡盘一转动,推拉螺帽随之转动,在止转销和止转孔的约束下推拉管沿自身轴线方向运动,从而带动所述推拉连片运动,带动公接头与母接头之间相对转动,从而致使器身管进行弯转;送钉机构的送钉杆通过第一传动齿轮组与卡盘二相连;在使用时,卡盘二转动带动送钉杆转动;推拉管套装在送钉杆外部。
4、优选的,所述器身管包括近部器身管和远部器身管,近部器身管与远部器身管之间通过单摆关节固定连接;
5、送钉杆包括近部送钉杆和远部送钉杆,所述近部送钉杆与远部送钉杆之间通过挠性连接部固定连接;
6、送钉机构中的螺旋轨道固定设置在远部器身管内部,螺旋状的疝修补钉与螺旋轨道相连,疝修补钉的尾部插入远部送钉杆的储钉槽。
7、优选的,器身管的近部器身管的远端设置有第一让位孔,远端接头设置有第二让位孔;
8、在弯转过程中,推拉连片的一部分进入第一让位孔和第二让位孔。
9、优选的,近部器身管与配置器的壳体之间可转动的连接;
10、近部器身管通过第二传动齿轮组与卡盘三相连,当卡盘三转动时近部器身管随之转动。
11、优选的,送钉杆、推拉管以及器身管自内至外同轴设置,推拉管的近端穿过器身管通过近端接头与推拉螺帽相连,送钉杆的近端穿过推拉管与第一传动齿轮组固定连接。
12、优选的,所述母接头设置有连接槽,所述推拉连片与所述连接槽相连。
13、优选的,配置器的壳体内部固定设置有支架部,推拉螺帽与支架部可转动的连接;第一传动齿轮组包括驱动座以及与所述驱动座相连的第一传动轮,第一传动轮与卡盘二固定连接;驱动座与支架部可转动的连接,送钉杆的近端与所述驱动座固定连接,当卡盘二转动时所述驱动座随之转动;
14、所述第二传动齿轮组包括与配置器的壳体之间可转动的连接的旋转体以及与旋转体固定连接的第二传动轮,所述第二传动轮与卡盘三相连;旋转体中部带有通透的中孔,所述器身管与旋转体中部的中孔固定连接;当卡盘三转动时,所述旋转体随之转动,致使器身管转动;
15、所述旋转体、推拉螺帽以及驱动座自下至上依次与支架部相连。
16、优选的,推拉管与近部器身管之间设置有密封环,所述密封环的内侧与推拉管相贴合,所述密封环的外侧与近部器身管相贴合。
17、优选的,所述公接头设置有槽口,在单摆式弯转机构进行弯转过程中,推拉连片能够自所述槽口通过。
18、优选的,远端接头的外部固定设置有支撑胶环,支撑胶环与远端接头侧壁固定连接,支撑胶环的外侧与器身管内侧壁相抵接。
19、本实用新型所公开的手术机器人系统专用单摆式修补器,能够使原本手动式疝修补器械配置于手术机器人系统,并加入可弯转的功能,使器械更容易在腹股沟等狭窄的区域操作锚钉,有助于提高手术效率和手术质量。
技术特征:
1.一种手术机器人系统专用单摆式修补器,包括器身管以及位于器身管内部的用于向疝修补区锚定疝修补钉的送钉机构,其特征在于:所述器身管的一端连接有能够与手术机器人系统相对接的配置器;
2.根据权利要求1所述的一种手术机器人系统专用单摆式修补器,其特征在于:所述器身管包括近部器身管和远部器身管,近部器身管与远部器身管之间通过单摆关节固定连接;
3.根据权利要求1所述的一种手术机器人系统专用单摆式修补器,其特征在于:器身管的近部器身管的远端设置有第一让位孔,远端接头设置有第二让位孔;
4.根据权利要求2所述的一种手术机器人系统专用单摆式修补器,其特征在于:近部器身管与配置器的壳体之间可转动的连接;
5.根据权利要求1所述的一种手术机器人系统专用单摆式修补器,其特征在于:送钉杆、推拉管以及器身管自内至外同轴设置,推拉管的近端穿过器身管通过近端接头与推拉螺帽相连,送钉杆的近端穿过推拉管与第一传动齿轮组固定连接。
6.根据权利要求1所述的一种手术机器人系统专用单摆式修补器,其特征在于:所述母接头设置有连接槽,所述推拉连片与所述连接槽相连。
7.根据权利要求4所述的一种手术机器人系统专用单摆式修补器,其特征在于:配置器的壳体内部固定设置有支架部,推拉螺帽与支架部可转动的连接;第一传动齿轮组包括驱动座以及与所述驱动座相连的第一传动轮,第一传动轮与卡盘二固定连接;驱动座与支架部可转动的连接,送钉杆的近端与所述驱动座固定连接,当卡盘二转动时所述驱动座随之转动;
8.根据权利要求2所述的一种手术机器人系统专用单摆式修补器,其特征在于:推拉管与近部器身管之间设置有密封环,所述密封环的内侧与推拉管相贴合,所述密封环的外侧与近部器身管相贴合。
9.根据权利要求1所述的一种手术机器人系统专用单摆式修补器,其特征在于:所述公接头设置有槽口,在单摆式弯转机构进行弯转过程中,推拉连片能够自所述槽口通过。
10.根据权利要求2所述的一种手术机器人系统专用单摆式修补器,其特征在于:远端接头的外部固定设置有支撑胶环,支撑胶环与远端接头侧壁固定连接,支撑胶环的外侧与器身管内侧壁相抵接。
技术总结
本技术公开了一种手术机器人系统专用单摆式修补器,包括器身管以及位于器身管内部的用于向疝修补区锚定疝修补钉的送钉机构,器身管的一端连接有能够与手术机器人系统相对接的配置器;器身管设置有单摆式弯转机构,单摆式弯转机构包括与器身管固定连接的单摆关节、与单摆关节相连的推拉管以及与所述推拉管的近端相连的推拉管致动机构;推拉管插装在器身管内,推拉管的近端固定设置有近端接头,近端接头通过外螺纹与推拉螺帽中部的内螺纹相连。本技术所公开的手术机器人系统专用单摆式修补器,能够使原本手动式疝修补器械配置于手术机器人系统,并加入可弯转的功能,使器械更容易在腹股沟等狭窄的区域操作锚钉,有助于提高手术效率和手术质量。
技术研发人员:庞建,高轶明
受保护的技术使用者:庞建
技术研发日:20220513
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!