一种推拿机器人用按摩头
本技术涉及推拿机器人,具体为一种推拿机器人用按摩头。
背景技术:
1、中医推拿治疗有着悠久的历史。它是一种物理治疗方法,以中医理论特别是经络理论为指导,强调人体体表通过经络、穴位与内脏之间存在着有机的内在联系——内脏有病可以通过经络反映到体表。但时至今日,各大医院的临床治疗仍由有经验的推拿技师人工进行,它是一项异常繁重的体力劳动,一个疗程需要推拿技师付出巨大体力。另外,推拿的疗效与推拿技师的水平经验密切相关(施力的大小、方向、位置、频率等对治疗效果影响很大)。随着机器人技术的发展,它在医疗领域的应用越来越广泛,已被应用于医疗床、外科手术、医疗康复等方面,但在中医推拿方面的应用也有应用,但是现有的推拿机器人用按摩头才有的是单一的按摩头,不能根据不同的人体穴道来实现不同的手法按摩需求。在日常使用的过程中,pvc层容易发生开裂现象。因此我们对此做出改进,提出一种推拿机器人用按摩头。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了如下的技术方案:
2、本实用新型一种推拿机器人用按摩头,包括切换块,所述切换块上设有与推拿机器人连接的连接法兰,所述切换块上设有一对相对设置的直杆,一个直杆的外端部设有手指按摩头,所述直杆的另一端设有手掌按摩头,所述手指按摩头的端部设有硅胶指套,所述硅胶指套为硅胶材质的;所述手掌按摩头的推拿表面设有硅胶掌垫;且所述手指按摩头内设有第一电加热器,所述手掌按摩头内设有第二电加热器。
3、作为本实用新型的一种优选技术方案,所述第一电加热器和第二电加热器的加热温度为30-50摄氏度。
4、作为本实用新型的一种优选技术方案,所述硅胶指套经便拆机构与手指按摩头连接,所述便拆机构包括设置在手指按摩头端部的卡柱,所述硅胶指套上设有与卡柱配合的卡孔。
5、作为本实用新型的一种优选技术方案,所述手指按摩头的端部为圆弧端。
6、作为本实用新型的一种优选技术方案,所述硅胶掌垫的推拿面上设有多个推拿凸起。
7、作为本实用新型的一种优选技术方案,所述硅胶掌垫经拆卸机构安装在手掌按摩头的底部,所述拆卸机构包括设置在硅胶掌垫上的卡块,所述手掌按摩头上设有与卡块相配合的卡口。
8、作为本实用新型的一种优选技术方案,所述卡块包括设置在硅胶掌垫上的基座,所述基座设有多个呈环形分布的形变条,所述形变条上设有卡头,所述卡头的两侧设有导向斜坡。
9、本实用新型的有益效果是:
10、1、该种推拿机器人用按摩头通过在切换块上设置一对相对设置的直杆,且一个直杆的外端部设有手指按摩头,所述直杆的另一端设有手掌按摩头,在推拿机器人进行推拿时,可根据推拿的需求来选择手掌按摩头或手掌按摩头来进行推拿按摩,从而可根据不同的人体穴道来实现不同的手法按摩需求,并且在手指按摩头的端部设有硅胶指套,不会对人体造成损伤;所述手掌按摩头的推拿表面设有硅胶掌垫,不会对人体造成损伤。本实用新型在手指按摩头内设有第一电加热器,所述手掌按摩头内设有第二电加热器,进行辅助加热从而提高了推拿按摩的治疗效果。
11、2、该种推拿机器人用按摩头中硅胶指套经便拆机构与手指按摩头连接,所述便拆机构包括设置在手指按摩头端部的卡柱,所述硅胶指套上设有与卡柱配合的卡孔,具有便于安装和拆卸,从而方便对硅胶指套进行更换。
12、3、该种推拿机器人用按摩头中的所述硅胶掌垫经拆卸机构安装在手掌按摩头的底部,所述拆卸机构包括设置在硅胶掌垫上的卡块,所述手掌按摩头上设有与卡块相配合的卡口,具有便于安装和拆卸,从而方便对硅胶掌垫进行更换。
技术特征:
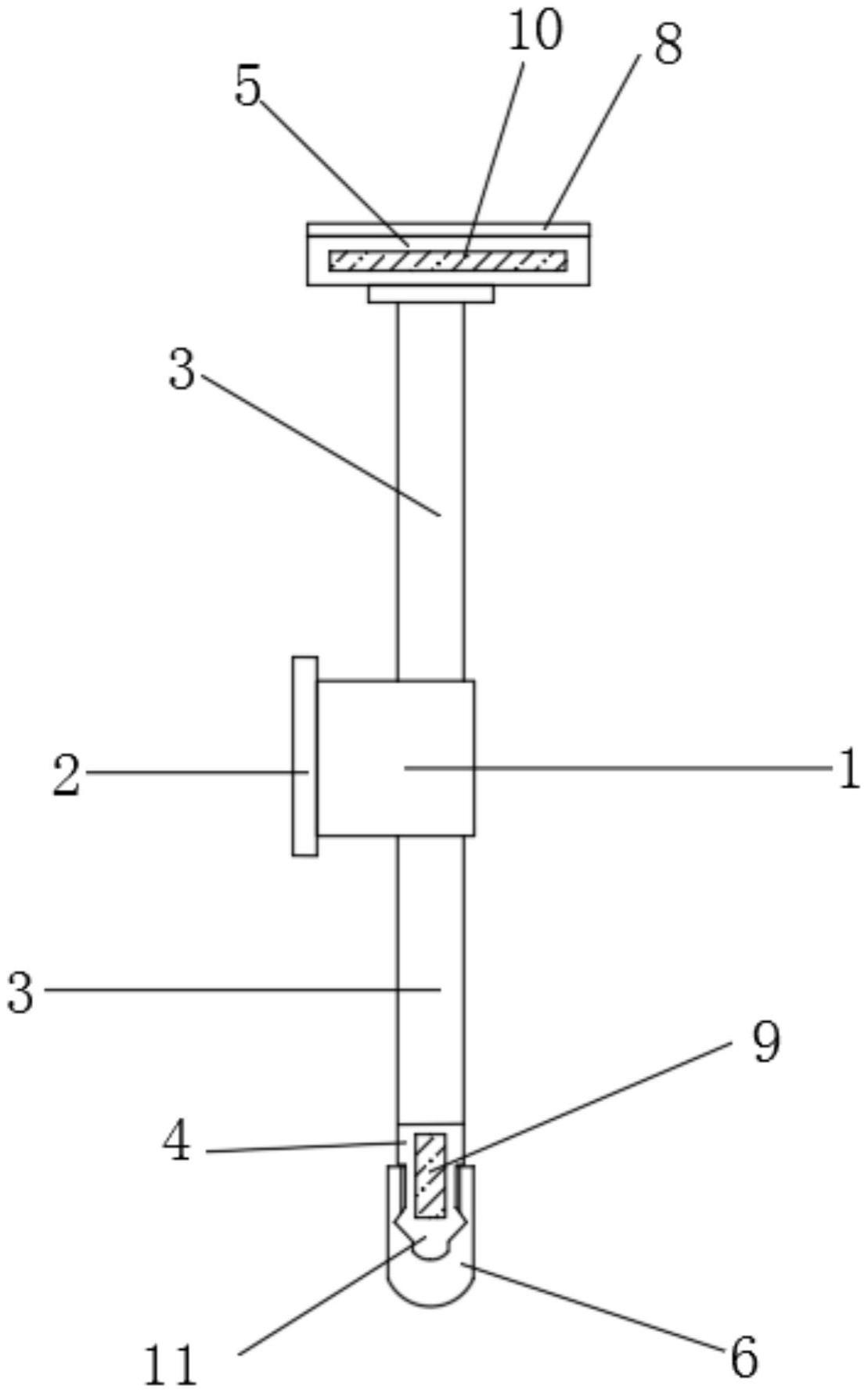
1.一种推拿机器人用按摩头,包括切换块(1),所述切换块(1)上设有与推拿机器人连接的连接法兰(2),其特征在于:所述切换块(1)上设有一对相对设置的直杆(3),一个直杆(3)的外端部设有手指按摩头(4),所述直杆(3)的另一端设有手掌按摩头(5),所述手指按摩头(4)的端部设有硅胶指套(6);所述手掌按摩头(5)的推拿表面设有硅胶掌垫(8);且所述手指按摩头(4)内设有第一电加热器(9),所述手掌按摩头(5)内设有第二电加热器(10)。
2.根据权利要求1所述的一种推拿机器人用按摩头,其特征在于,所述第一电加热器(9)和第二电加热器(10)的加热温度为30-50摄氏度。
3.根据权利要求1所述的一种推拿机器人用按摩头,其特征在于,所述硅胶指套(6)经便拆机构与手指按摩头(4)连接,所述便拆机构包括设置在手指按摩头(4)端部的卡柱(11),所述硅胶指套(6)上设有与卡柱(11)配合的卡孔(12)。
4.根据权利要求1所述的一种推拿机器人用按摩头,其特征在于,所述手指按摩头(4)的端部为圆弧端。
5.根据权利要求1所述的一种推拿机器人用按摩头,其特征在于,所述硅胶掌垫(8)的推拿面上设有多个推拿凸起(13)。
6.根据权利要求1所述的一种推拿机器人用按摩头,其特征在于,所述硅胶掌垫(8)经拆卸机构安装在手掌按摩头(5)的底部,所述拆卸机构包括设置在硅胶掌垫(8)上的卡块(14),所述手掌按摩头(5)上设有与卡块(14)相配合的卡口(15)。
7.根据权利要求6所述的一种推拿机器人用按摩头,其特征在于,所述卡块(14)包括设置在硅胶掌垫(8)上的基座(16),所述基座(16)设有多个呈环形分布的形变条(17),所述形变条(17)上设有卡头(18),所述卡头(18)的两侧设有导向斜坡(19)。
技术总结
本技术公开了一种推拿机器人用按摩头,包括切换块,所述切换块上设有与推拿机器人连接的连接法兰,所述切换块上设有一对相对设置的直杆,一个直杆的外端部设有手指按摩头,所述直杆的另一端设有手掌按摩头,所述手指按摩头的端部设有硅胶指套,所述硅胶指套为硅胶材质的;所述手掌按摩头的推拿表面设有硅胶掌垫;且所述手指按摩头内设有第一电加热器,所述手掌按摩头内设有第二电加热器。本技术可根据推拿的需求来选择手掌按摩头或手掌按摩头来进行推拿按摩,从而可根据不同的人体穴道来实现不同的手法按摩需求。
技术研发人员:颜建军,陈厚儒,蔡金星,赵伟阳,陈博畅
受保护的技术使用者:华东理工大学
技术研发日:20220705
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!