人体信息采集机器人的制作方法
本技术涉及机器人,具体而言,涉及一种人体信息采集机器人。
背景技术:
1、传统的光学人体检测机器人依靠可见光单摄像头对人体关键点信息进行采集,但采集信息单一,信息采集精度低,实时性差,无法实现三维人体高精度动作信息的稳定实时采集。
技术实现思路
1、本实用新型的目的在于提供一种人体信息采集机器人,以解决现有技术采集信息单一的问题。
2、为了实现上述目的,本实用新型提出一种人体信息采集机器人,包括行走机构、底座、显示器和信息采集组件;所述行走机构、底座和显示器由下而上依次设置,所述信息采集组件设置在所述底座的上部;
3、所述信息采集组件包括彩色摄像头、红外结构深度信息采集器、超声阵列成像器和红外热成像传感器;
4、所述彩色摄像头、红外结构深度信息采集器、超声阵列成像器和红外热成像传感器的朝向一致;
5、所述超声阵列成像器包括超声波阵列安装板和安装在所述超声波阵列安装板上的多个超声波传感器,多个超声波传感器阵列排布,超声波传感器阵列间距为35mm-45mm;
6、所述超声阵列成像器包括电机安装轴承架和与所述电机安装轴承架连接的双俯仰伺服电机,所述超声波阵列安装板安装在所述电极安装轴承架上,所述电机安装轴承架安装在所述底座上,所述双俯仰伺服电机用于带动所述超声波阵列安装板转动。
7、进一步地,所述彩色摄像头和红外结构深度信息采集器集成设置在采集板上,所述采集板安装在所述底座的顶部,所述红外热成像传感器位于所述采集板的下方;所述超声阵列成像器位于所述底座的一角。
8、进一步地,所述红外结构深度信息采集器包括红外光发射器和红外摄像头。
9、进一步地,所述信息采集组件还包括恒温冷却模块,所述恒温冷却模块内置于所述红外热成像传感器中,所述恒温冷却模块用于给所述红外热成像传感器降温。
10、进一步地,所述超声阵列成像器包括超声波阵列安装板和安装在所述超声波阵列安装板上的多个超声波传感器,多个超声波传感器阵列排布,超声波传感器阵列间距为35mm-45mm。
11、进一步地,所述超声阵列成像器包括电机安装轴承架和与所述电机安装轴承架连接的双俯仰伺服电机,所述电机安装轴承架安装在所述底座上,所述双俯仰伺服电机用于带动所述超声波阵列安装板转动。
12、进一步地,所述行走机构包括行走轮和驱动电机,所述行走轮和所述驱动电机均安装在所述底座的底部,所述驱动电机与所述行走轮连接。
13、进一步地,所述显示器包括触摸显示屏和设于所述触摸显示屏后部的触摸屏操作门。
14、进一步地,所述触摸显示屏与所述底座转动连接。
15、进一步地,所述底座包括水平设置的底板和设于所述底板上的支撑板,所述支撑板的下部与所述底板之间的夹角为锐角且与所述底板一体成型。
16、与现有技术相比较,本实用新型能够带来如下技术效果:
17、本实用新型提出的人体信息采集机器人,通过在底座上集成彩色摄像头、红外结构深度信息采集器、红外热成像传感器以及超声阵列成像器,能够对人体进行多维度信息获取,其中,彩色摄像头可以获取人体的彩色图像信息,红外结构深度信息采集器可以获取人体的具有深度信息的红外光点阵图像,红外热成像传感器可以采集人体的红外热成像信息,超声阵列成像器可以通过向人体发射超声波并接收扫描的超声波信息。本实用新型的人体信息采集机器人相比现有技术中人体信息采集机器人,可以一次性采集多种模态的图像信息,采集的信息更加丰富全面,有利于后续对人体姿态信息进行分析和识别。
18、进一步地,通过双俯仰伺服电机带动超声波阵列安装板转动,以便于在一定角度范围内扫描人体,获取较多的信息。
19、附图说明
20、构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,使得本实用新型的其它特征、目的和优点变得更明显。本实用新型的示意性实施例附图及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
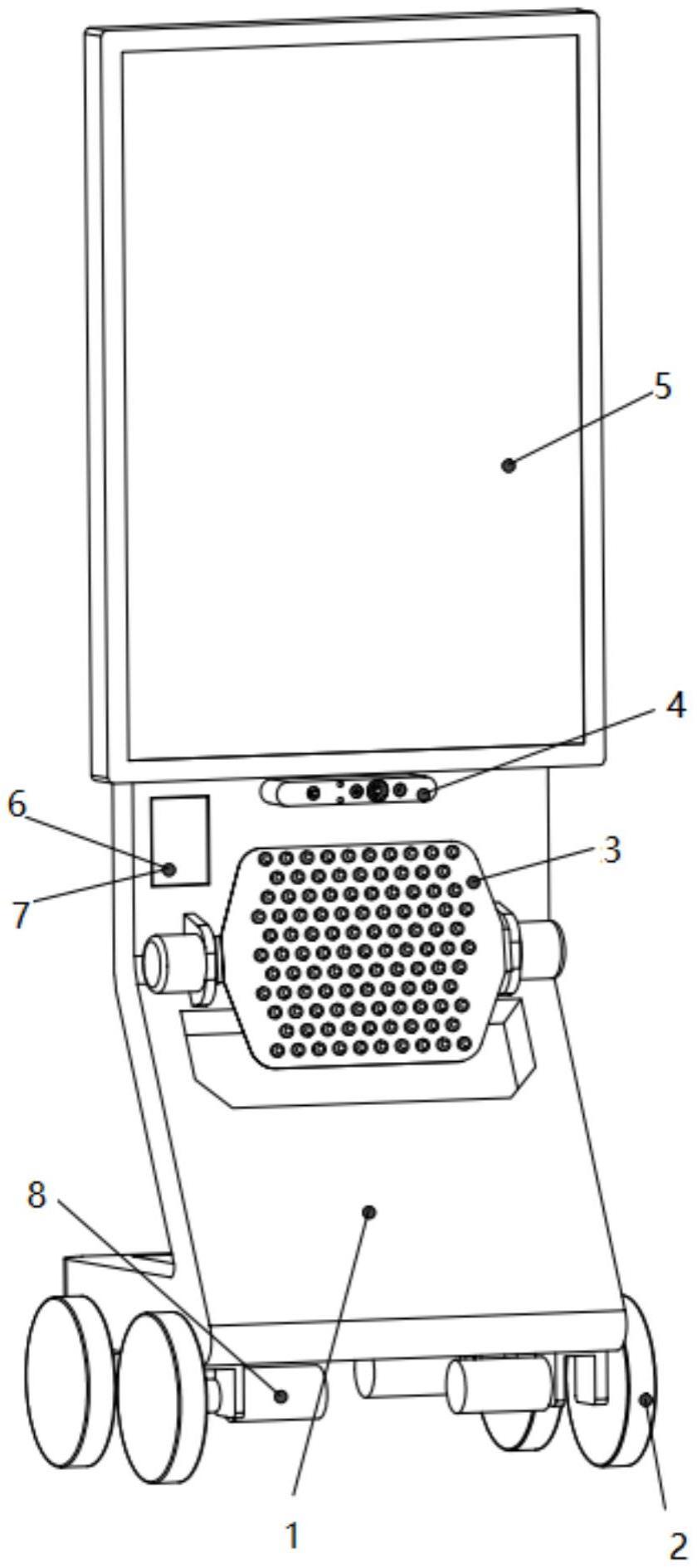
21、图1是本实用新型实施例提供的人体信息采集机器人的正面结构示意图。
22、图2是本实用新型实施例提供的人体信息采集机器人的反面结构示意图;
23、图3是图1中的超声阵列成像器的放大图。
24、图4是图1中的采集板的放大图。
技术特征:
1.一种人体信息采集机器人,其特征在于,包括行走机构、底座、显示器和信息采集组件;所述行走机构、底座和显示器由下而上依次设置,所述信息采集组件设置在所述底座的上部;
2.根据权利要求1所述的人体信息采集机器人,其特征在于,所述彩色摄像头和红外结构深度信息采集器集成设置在采集板上,所述采集板安装在所述底座的顶部,所述红外热成像传感器位于所述采集板的下方;所述超声阵列成像器位于所述底座的一角。
3.根据权利要求1所述的人体信息采集机器人,其特征在于,所述红外结构深度信息采集器包括红外光发射器和红外摄像头。
4.根据权利要求1所述的人体信息采集机器人,其特征在于,所述信息采集组件还包括恒温冷却模块,所述恒温冷却模块内置于所述红外热成像传感器中,所述恒温冷却模块用于给所述红外热成像传感器降温。
5.根据权利要求1所述的人体信息采集机器人,其特征在于,所述行走机构包括行走轮和驱动电机,所述行走轮和所述驱动电机均安装在所述底座的底部,所述驱动电机与所述行走轮连接。
6.根据权利要求1所述的人体信息采集机器人,其特征在于,所述显示器包括触摸显示屏和设于所述触摸显示屏后部的触摸屏操作门。
7.根据权利要求6所述的人体信息采集机器人,其特征在于,所述触摸显示屏与所述底座转动连接。
8.根据权利要求1所述的人体信息采集机器人,其特征在于,所述底座包括水平设置的底板和设于所述底板上的支撑板,所述支撑板的下部与所述底板之间的夹角为锐角且与所述底板一体成型。
技术总结
本技术公开了一种人体信息采集机器人,包括行走机构、底座、显示器和信息采集组件;所述行走机构、底座和显示器由下而上依次设置,所述信息采集组件设置在所述底座的上部;所述信息采集组件包括彩色摄像头、红外结构深度信息采集器、超声阵列成像器和红外热成像传感器;所述彩色摄像头、红外结构深度信息采集器、超声阵列成像器和红外热成像传感器的朝向一致。本技术的人体信息采集机器人相比现有技术中人体信息采集机器人,可以一次性采集多种模态的图像信息,采集的信息更加丰富和全面。
技术研发人员:杨金鹏
受保护的技术使用者:杨金鹏
技术研发日:20220810
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!