一种旋转和轴向驱动机构及机器人系统的制作方法
本技术涉及机器人辅助装置的,特别涉及一种旋转和轴向驱动机构及机器人系统。
背景技术:
1、血管介入手术作为以治疗血管疾病或癌症为目的的微创手术,主要基于x射线透视摄影来通过血管从经皮至病变部位插入直径为数mm以下的细导管(导管),从而使上述导管到达目标器官并进行治疗。目前,包括韩国在内的世界各地所实施的血管介入手术的代表性治疗有肝癌的经动脉化疗栓塞(trans-arterial chemoembolization:tace)、经皮血管成形术、主动脉疾病中人造血管支架植入术等。
2、公告号为cn103239793a的一种血管介入机器人导丝驱动盒,包括导丝引导管(1),主动滚筒(3),从动滚筒(4),进退齿轮(5)和驱动盒盒体(6),进退齿轮设置在驱动盒盒体上;主动滚筒一端与进退齿轮连接,另一端固定于驱动盒盒体内壁上;从动滚筒与主动滚筒轴线平行,两端分别固定在驱动盒盒
3、体内壁上;从动滚筒与主动滚筒夹缝距离与导丝直径相适应,驱动盒盒体上主动滚筒与从动滚筒夹缝相对的两个面上分别设置一导丝引导管,两导丝引导管同轴,且同主动滚筒与从动滚筒轴向垂直。该专利需通过引导管进行导丝的安装,导丝的太软或者引导管长度过长都会增加导丝安装难度。
技术实现思路
1、本实用新型的目的在于克服上述现有技术的不足,提供一种旋转和轴向驱动机构及机器人系统,通过其旨在解决现有技术中导丝安装难度大的技术问题。
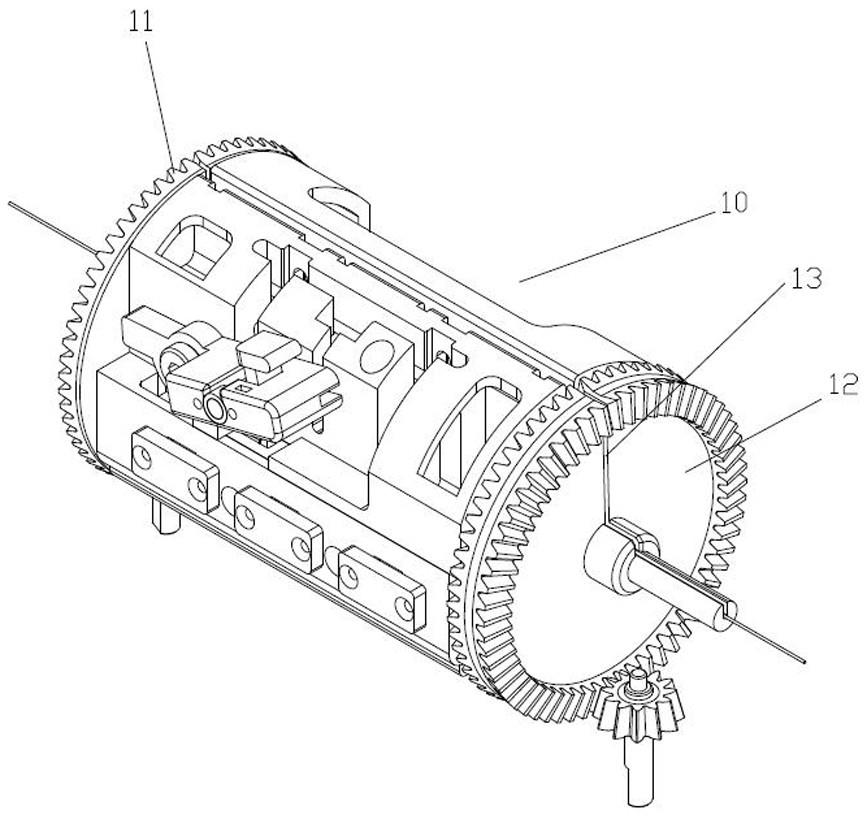
2、为实现上述目的,本实用新型提出了一种旋转和轴向驱动机构,包括输送本体和安装在所述输送本体上的旋转齿轮;所述旋转齿轮安装在所述输送本体的一侧,输送齿轮安装在所述输送本体的另一侧;所述输送本体、所述旋转齿轮和所述输送齿轮被开口轴向贯穿,导丝通过所述开口卡入驱动机构。
3、作为优选,所述输送本体上设有输送机构,所述输送机构由所述输送齿轮带动。
4、作为优选,所述输送机构包括由所述输送齿轮带动的主动齿轮、由所述主动齿轮带动的驱动硅胶滚轮和与所述驱动硅胶滚轮对应的压紧硅胶滚轮;所述主动齿轮和所述输送齿轮之间设有一传动机构。
5、作为优选,所述旋转齿轮为斜齿轮,所述旋转齿轮上连接有第一小斜齿轮。
6、作为优选,所述输送齿轮为双面斜齿轮,所述输送齿轮的远离所述输送本体的一端连接有第二斜齿轮,所述输送齿轮的靠近所述输送本体的一端连接有所述传动机构。
7、作为优选,所述传动机构包括一借斜齿轮和与所述借斜齿轮同轴安装的主动圆柱齿轮,所述主动圆柱齿轮带动所述主动齿轮转动。
8、为实现上述目的,本实用新型还提出了一种机器人系统,采用了上述的旋转和轴向驱动机构。
9、与现有技术相比,本实用新型提供的一种旋转和轴向驱动机构的有益效果为:
10、1、驱动机构设有轴向贯穿的开口,导丝从开口进行安装,相对于从一端穿线进入另一端的方式效率更高,安装难度更小。
11、2、通过旋转齿轮的转动带动导丝旋转,通过输送齿轮的转动带动导丝进行轴向输送。
12、3、旋转齿轮和输送齿轮的转速相同,导丝做旋转运动,更容易在迂曲和分叉的血管中通行;旋转齿轮和输送齿轮的转速不同时,导丝同时做轴向和旋转运动,调整旋转齿轮和输送齿轮的速度和方向,能控制导丝旋转和轴向运动的速度和方向。
13、本实用新型的特征及优点将通过实施例结合附图进行详细说明。
技术特征:
1.一种旋转和轴向驱动机构,包括输送本体(10)和安装在所述输送本体(10)上的旋转齿轮(11);其特征在于:所述旋转齿轮(11)安装在所述输送本体(10)的一侧,输送齿轮(12)安装在所述输送本体(10)的另一侧;所述输送本体(10)、所述旋转齿轮(11)和所述输送齿轮(12)被开口(13)轴向贯穿,导丝通过所述开口(13)卡入驱动机构。
2.如权利要求1所述的一种旋转和轴向驱动机构,其特征在于:所述输送本体(10)上设有输送机构(14),所述输送机构(14)由所述输送齿轮(12)带动。
3.如权利要求2所述的一种旋转和轴向驱动机构,其特征在于:所述输送机构(14)包括由所述输送齿轮(12)带动的主动齿轮(15)、由所述主动齿轮(15)带动的驱动硅胶滚轮(16)和与所述驱动硅胶滚轮(16)对应的压紧硅胶滚轮(17);所述主动齿轮(15)和所述输送齿轮(12)之间设有一传动机构(20)。
4.如权利要求1所述的一种旋转和轴向驱动机构,其特征在于:所述旋转齿轮(11)为斜齿轮,所述旋转齿轮(11)上连接有第一小斜齿轮(18)。
5.如权利要求3所述的一种旋转和轴向驱动机构,其特征在于:所述输送齿轮(12)为双面斜齿轮,所述输送齿轮(12)的远离所述输送本体(10)的一端连接有第二斜齿轮(19),所述输送齿轮(12)的靠近所述输送本体(10)的一端连接有所述传动机构(20)。
6.如权利要求5所述的一种旋转和轴向驱动机构,其特征在于:所述传动机构(20)包括一借斜齿轮(21)和与所述借斜齿轮(21)同轴安装的主动圆柱齿轮(22),所述主动圆柱齿轮(22)带动所述主动齿轮(15)转动。
7.一种机器人系统,其特征在于:使用了如权利要求1-6任一项所述的旋转和轴向驱动机构。
技术总结
本技术适用于机器人辅助装置的技术领域,公开了一种旋转和轴向驱动机构及机器人系统。本技术提供的一种旋转和轴向驱动机构及机器人系统,包括输送本体和安装在所述输送本体上的旋转齿轮;所述旋转齿轮安装在所述输送本体的一侧,所述输送齿轮安装在所述输送本体的另一侧;所述输送本体、所述旋转齿轮和所述输送齿轮被开口轴向贯穿,导丝通过所述开口卡入驱动机构。解决现有技术中导丝安装难度大的技术问题。
技术研发人员:马晓峰,孙冰,刘振全,贾晶
受保护的技术使用者:上海暖阳医疗器械有限公司
技术研发日:20220930
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!