一种穿刺机器人的制作方法
本技术涉及医疗器械,尤其涉及一种穿刺机器人。
背景技术:
1、穿刺机器人是一种医疗外科机器人,其整合计算机技术、影像技术以及机器人技术,一般由机械臂、成像设备、空间定位系统及工作站等部分构成,能够应用于穿刺活检、肿瘤消融以及疼痛科微创介入治疗等。
2、现有技术中,穿刺机器人会与ct扫描设备同步使用,穿刺机器人需要利用自身的机械臂将相应的装置伸入到ct扫描区域内,以引导医生通过手动方式执行穿刺作业。机械臂包括与驱动装置连接的驱动端和与相应所述装置连接的执行端。执行端往往设有万向节等结构与相应的装置连接。
3、而机械臂往往都是通过多根连杆依次连接而形成,其运动主要是在平面内平移,在移动过程中其难以限定万向节的摆动,导致其不能顺利对相应的装置进行位姿调整。
技术实现思路
1、本实用新型的目的在于提供一种穿刺机器人,解决了现有技术中穿刺机器人在使用机械臂调整相应装置的位姿时,由于难以限定万向节的移动,导致其难以顺利实现位姿调整的问题。
2、为达此目的,本实用新型采用以下技术方案:
3、一种穿刺机器人,其包括:
4、基座;
5、导引机构;
6、并联连杆组件,其一端连接到基座上,另一端通过万向节与所述导引机构连接,以调整导引机构的位姿;以及
7、锁定组件,设置在所述并联连杆组件上,所述锁定组件与所述并联连杆组件形成双平行四边形框架,以限制万向节绕竖直轴摆动。
8、可选地,所述并联连杆组件包括第一连杆组件和设置在所述第一连杆组件下方的第二连杆组件。
9、可选地,所述锁定组件设置在所述第一连杆组件上;所述锁定组件包括:第一锁定杆,转动连接在所述基座上;第二锁定杆;连接件,连接所述第一锁定杆和第二锁定杆,且与所述第一连杆组件转动连接。
10、可选地,所述连接件为v形杆,所述v形杆的两端分别与所述第一锁定杆及所述第二锁定杆转动连接,所述v形杆的尖端与所述第一连杆组件转动连接。
11、可选地,所述第一锁定杆、所述v形杆的一边、所述第一连杆组件以及基座之间形成第一平行四边形框架。
12、可选地,所述第一连杆组件一端设置有第一万向节,所述第二锁定杆、第一万向节、所述第一连杆组件以及所述v形杆的一边之间形成第二平行四边形框架。
13、可选地,所述第一连杆组件一端设置有第一万向节,所述第一连杆组件包括:两组相对设置的第一连杆部,一端分别与所述基座上不同驱动机构连接,另一端通过同一轴与所述第一万向节连接,至少一组所述第一连杆部上设有所述锁定组件。
14、可选地,所述第一连杆部包括:
15、第一连杆,转动连接在所述基座上并于驱动机构连接;
16、第二连杆,一端通过轴一转动连接在所述第一连杆远离基座的一端,另一端与所述第一万向节相连接,所述v形杆的尖端通过所述轴一与所述第一连杆部转动连接。
17、可选地,所述第二连杆组件包括:第二万向节,转动连接在所述导引机构上且位于所述第一连杆组件下方;以及两个相对设置的第二连杆部,两个所述第二连杆部的一端分别与所述基座上不同驱动机构连接,另一端通过同一轴与所述第二万向节连接。
18、可选地,所述穿刺机器人还包括:壳体,所述基座设置在所述壳体内,所述壳体的侧面上开设有分别供所述第一连杆组件和第二连杆组件伸出的第一窗口和第二窗口;上述窗口的上下两端面均设置有滚珠组件,所述第一连杆组件和所述第二连杆组件均与滚珠组件滚动配合。
19、可选地,所述滚珠组件包括多个滚珠;所述第一连杆组件及所述第二连杆组件与滚珠接触部分的宽度大于相邻两所述滚珠之间的距离。
20、本实用新型的有益效果:
21、通过设置并联连杆组件,有效减少穿刺机器人的体积,从而使得导引机构能够在更大范围内移动,以便于穿刺机器人能够到达ct扫描区域内的任意位置。而通过设置锁定组件以在基座、第一连杆组件以及第一万向节之间形成双平行四边形框架,能够对第一万向节的摆动方向进行有效限制,使得双并联连杆组件在运行过程中,能够顺利实现对导引机构位姿的调整。同时整体采用轻量化设计,使得整体的总量较轻,能够直接固定在病人身体上,以实现对病人呼吸运动补偿。以此通过并联连杆组件和锁定组件的配合,使得穿刺机器人在运行过程中顺利实现对导引机构位姿的调整,同时使得穿刺机器人满足较小体积和较大穿刺范围的兼容,有效降低了对医生进行穿刺作业的干扰,提高了手术的成功率。
技术特征:
1.一种穿刺机器人,其特征在于,所述穿刺机器人包括:
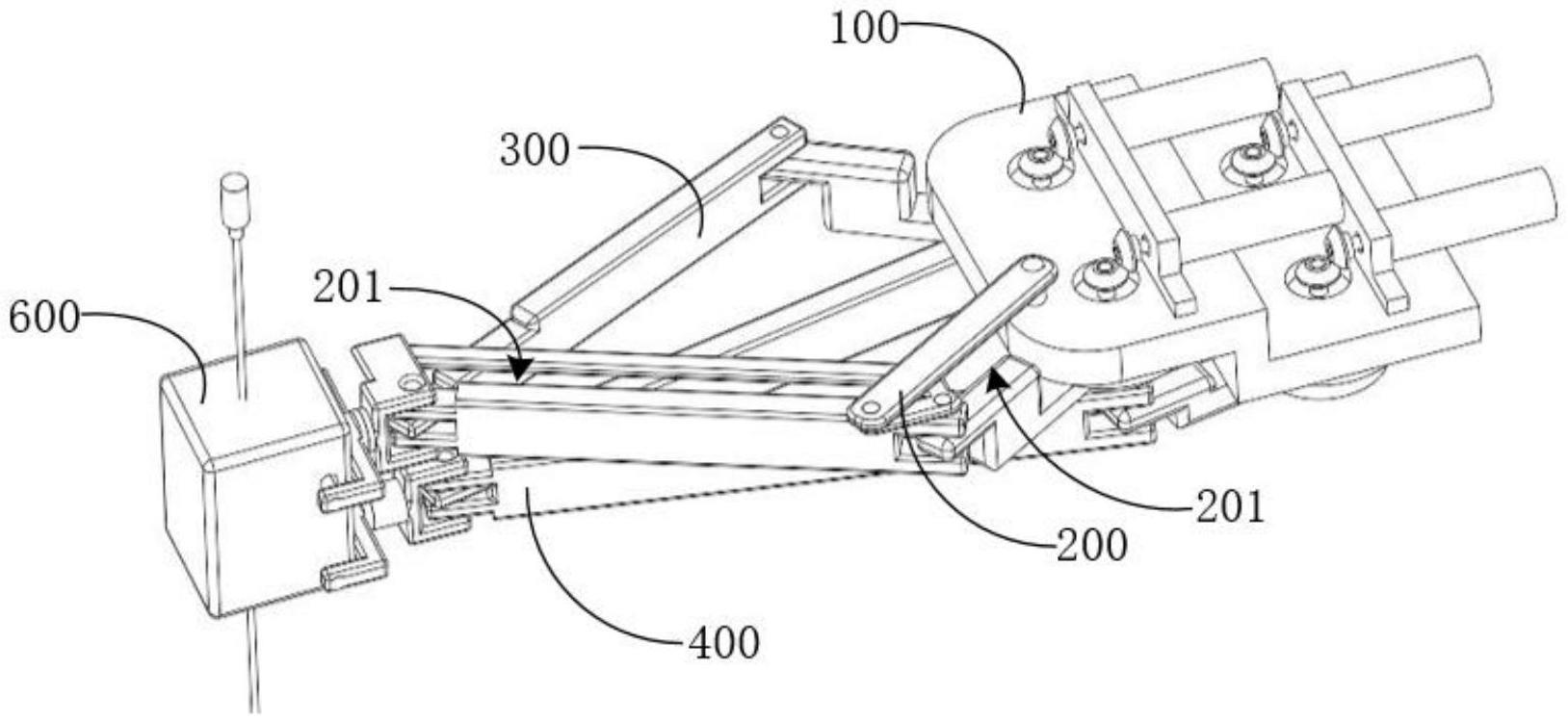
2.根据权利要求1所述的穿刺机器人,所述并联连杆组件包括第一连杆组件(300)和设置在所述第一连杆组件(300)下方的第二连杆组件(400)。
3.根据权利要求2所述的穿刺机器人,其特征在于,所述锁定组件(200)设置在所述第一连杆组件(300)上;
4.根据权利要求3所述的穿刺机器人,其特征在于,所述连接件(220)为v形杆,所述v形杆的开口处两端分别与所述第一锁定杆(210)及所述第二锁定杆(230)转动连接,所述v形杆的尖端与所述第一连杆组件(300)转动连接。
5.根据权利要求4所述的穿刺机器人,其特征在于,所述第一锁定杆(210)、所述v形杆的一边、所述第一连杆组件(300)以及基座(100)之间形成第一平行四边形框架。
6.根据权利要求4所述的穿刺机器人,其特征在于,所述第一连杆组件(300)一端设置有第一万向节(310),所述第二锁定杆(230)、第一万向节(310)、所述v形杆的一边及所述第一连杆组件(300)之间形成第二平行四边形框架。
7.根据权利要求4所述的穿刺机器人,其特征在于,所述第一连杆组件(300)一端设置有第一万向节(310),所述第一连杆组件(300)包括:
8.根据权利要求7所述的穿刺机器人,其特征在于,所述第一连杆部(320)包括:
9.根据权利要求2至8中任一项所述的穿刺机器人,其特征在于,所述第二连杆组件(400)包括:
10.根据权利要求2至8中任一项所述的穿刺机器人,其特征在于,所述穿刺机器人还包括:
11.根据权利要求10所述的穿刺机器人,其特征在于,所述滚珠组件包括多个滚珠(520);所述第一连杆组件(300)及所述第二连杆组件(400)与滚珠(520)接触部分的宽度大于相邻两所述滚珠(520)之间的距离。
技术总结
本技术属于医疗器械技术领域,公开了一种穿刺机器人。该穿刺机器人包括:基座、导引机构、并联连杆组件以及锁定组件。并联连杆组件设置在基座上用于调整导引机构的位姿,并联连杆组件包括通过第一万向节与导引机构活动连接的第一连杆组件和设置在第一连杆组件下方的第二连杆组件。锁定组件设置在第一连杆组件上并与第一万向节相连接,锁定组件与第一连杆组件形成双平行四边形框架,以锁定第一万向节的摆动方向。以此通过并联连杆组件和锁定组件的配合,使得穿刺机器人在运行过程中顺利实现对导引机构位姿的调整,同时使得穿刺机器人满足较小体积和较大穿刺范围的兼容,有效降低了对医生进行穿刺作业的干扰,提高了手术的成功率。
技术研发人员:孙步梁,宋彬,廖志祥,张震,佘铭钢
受保护的技术使用者:苏州恒瑞宏远医疗科技有限公司
技术研发日:20220930
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!