模体的制作方法
本技术涉及一种模体,属于医学成像领域。
背景技术:
1、多模态成像设备受到越来越多的关注,大量研究表明,两种或更多种方法联合应用可以提高诊断效能。由于pet对组织解剖结构的分辨率较差,对病灶的定位不够精确,这在一定程度上限制了pet的推广应用。pet/ct是将pet与ct有机地结合在同一设备上的医学影像设备,由ct提供病灶的精确解剖定位,而pet提供病灶详尽的功能与代谢等分子信息,得到受检者在同一条件下的解剖结构与功能代谢相融合的图像,具有灵敏、准确、特异及定位精确等特点,一次显像可获得全身各方位的断层图像。
2、但在临床与科研的使用中,pet/ct也暴露了不少的局限性,这些局限性主要还是归咎于ct本身的不足:①ct不能与pet同时采集图像,pet/ct数据的采集本质上仍然是pet与ct两个系统独立进行;②ct会导致较高剂量的x线,特别不适合孕妇、儿童及年老体弱等不宜接受x线检查者。
3、因此,pet与mr相结合的多模态设备应运而生,mr相对于ct具有优势,能进行扩散加权成像、扩散张量成像、扩散峰度成像、磁共振灌注成像等多功能分子成像技术。特别的是mr无电离辐射,特别适用儿童、青少年以及孕妇等特殊人群,并且mr的造影剂更加的安全,通过部分容积校准、运动补偿等,mr能够更好的指导pet图像重建,并提供更加全面的整体结构信息。pet与mr两种设备的结合能够实现同步数据采集并且使图像融合,能获得更准确的确定人体结构、功能和代谢等全方位的信息,并减少辐射,这对改进疾病的诊断和治疗有重要价值。
4、目前的传统技术中,pet/mr多模态设备在进行检测时,能够实现同步数据采集并且使图像融合。但由于硬件安装的误差,导致pet与mr坐标系不完全重合,从而导致pet图像与mr图像的配准精度差。较为广泛的方法是利用模体,进行pet/mr扫描,然后提取扫描图像中的特征明显点,最后计算pet与mri两个坐标系之间的坐标变换,提高pet/mr图像配准精度。
5、有鉴于此,确有必要提出一种新的模体,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种模体,以实现机器人影像平台的螺旋标定,提高成像准确度。
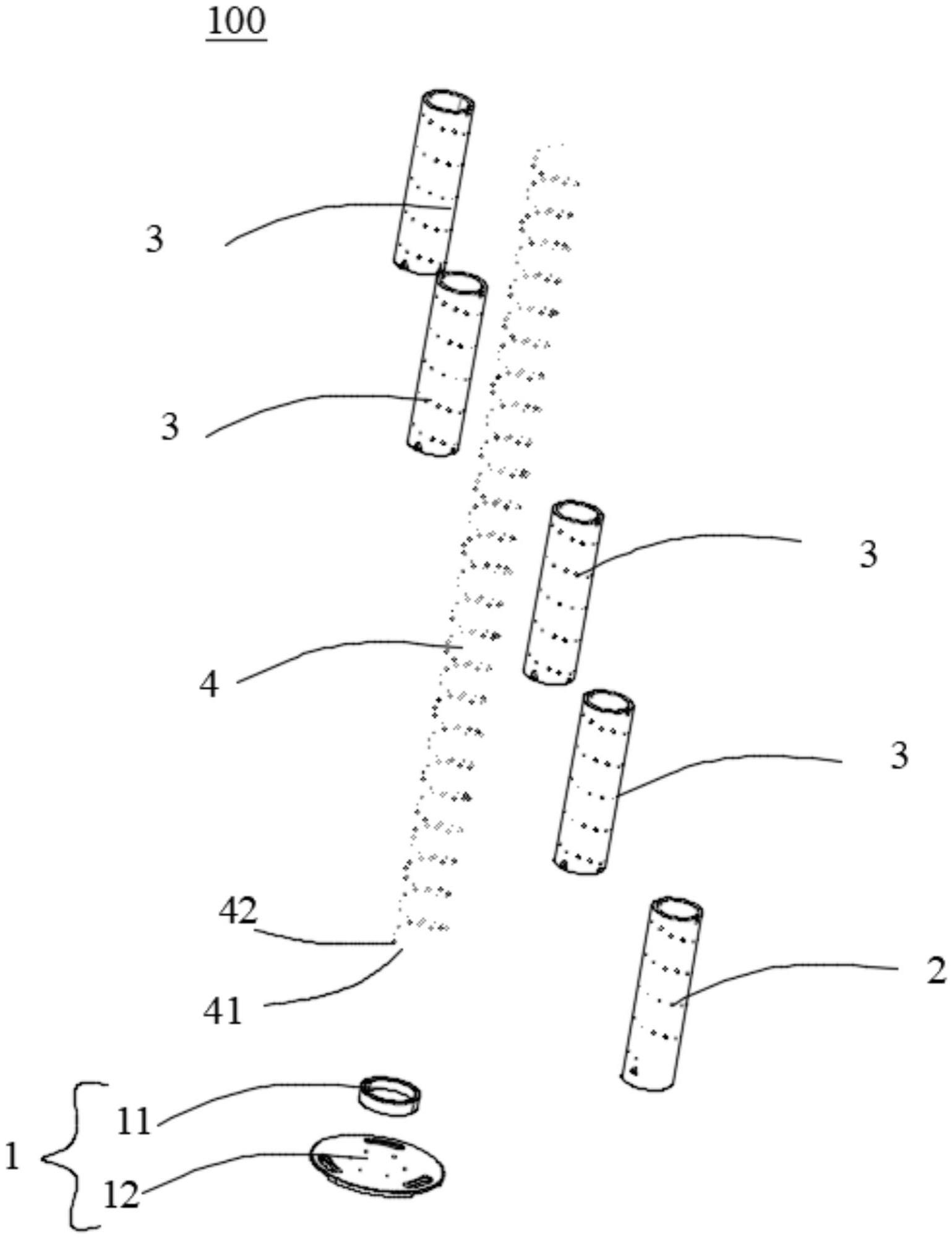
2、为实现上述目的,本实用新型提供了一种模体,用于机器人影像平台的螺旋标定,包括沿竖直方向依次连接的基座、基座塔底及n个塔身组件,其中,n为整数,且n≥0,所述基座塔底和所述塔身组件均为空心圆柱体,且所述基座塔底和所述塔身组件上设有圆珠组件,所述圆珠组件围绕所述基座塔底的旋转轴心线顺时针螺旋向上设置在所述基座塔底和所述塔身组件上。
3、作为本实用新型的进一步改进,水平方向上,所述圆珠组件到所述旋转轴心线的旋转直径为110mm。
4、作为本实用新型的进一步改进,所述圆珠组件围绕所述旋转轴心线按30°等间隔角度顺时针螺旋设置。
5、作为本实用新型的进一步改进,所述圆珠组件包括若干第一圆珠和若干第二圆珠,所述基座塔底和所述塔身组件上均对应的设有第一圆珠镶嵌孔和第二圆珠镶嵌孔,所述第一圆珠和所述第二圆珠分别安装在所述第一圆珠镶嵌孔和所述第二圆珠镶嵌孔内,按预设规律循环排列。
6、作为本实用新型的进一步改进,所述预设规律为以一个所述第一圆珠、一个所述第二圆珠、两个所述第一圆珠、两个所述第二圆珠、三个所述第一圆珠、三个所述第二圆珠、四个所述第一圆珠、四个所述第二圆珠、五个所述第一圆珠、五个所述第二圆珠的顺序循环排列。
7、作为本实用新型的进一步改进,所述基座塔底包括塔底第一端和塔底第二端,所述塔底第一端安装在所述基座上,所述塔身组件包括塔身第一端和塔身第二端,所述塔底第二端、所述塔身第一端及所述塔身第二端上均设有对应设置的定位孔,配置为通过插入定位件实现所述基座塔底和所述塔身组件之间或两个所述塔身组件之间的定位。
8、作为本实用新型的进一步改进,所述基座塔底包括塔底侧壁,所述塔身组件包括塔身侧壁,所述基座侧壁靠近所述塔底第二端及所述塔身组件靠近所述塔身第一端和所述塔身第二端上均设有连接部,配置为通过连接件连接两个所述连接部实现所述基座塔底和所述塔身组件之间或两个所述塔身组件的连接。
9、作为本实用新型的进一步改进,所述塔底侧壁靠近所述塔底第一端和所述塔身侧壁靠近所述塔身第一端上均设有循环指示部,所述圆珠组件从所述循环指示部指示的位置开始循环排列。
10、作为本实用新型的进一步改进,所述基座包括安装部和基板,所述安装部固定在所述基板上,所述安装部包括呈圆柱体的收容腔,所述收容腔的半径等于所述基座塔底的外半径,配置为将所述基座塔底安装在所述安装部内。
11、作为本实用新型的进一步改进,所述基座塔底和所述塔身组件为非金属材质,所述圆珠组件为金属材质。
12、本实用新型的有益效果是:本实用新型的模体通过在基座塔底和塔身组件上设置顺时针螺旋镶嵌的圆珠组件,便捷的实现通过扫描模体完成机器人影像平台的螺旋标定,标定准确快捷,易于识别。通过设置n个塔身组件,n为整数,且n≥0,方便的改变模体高度,从而实现不同高度的螺旋标定,适用于不同高度的机器人影像平台。
技术特征:
1.一种模体,用于机器人影像平台的螺旋标定,其特征在于:包括沿竖直方向依次连接的基座、基座塔底及n个塔身组件,其中,n为整数,且n≥0,所述基座塔底和所述塔身组件均为空心圆柱体,且所述基座塔底和所述塔身组件上设有圆珠组件,所述圆珠组件围绕所述基座塔底的旋转轴心线顺时针螺旋向上设置在所述基座塔底和所述塔身组件上。
2.根据权利要求1所述的模体,其特征在于:水平方向上,所述圆珠组件到所述旋转轴心线的旋转直径为110mm。
3.根据权利要求1所述的模体,其特征在于:所述圆珠组件围绕所述旋转轴心线按30°等间隔角度顺时针螺旋设置。
4.根据权利要求1所述的模体,其特征在于:所述圆珠组件包括若干第一圆珠和若干第二圆珠,所述基座塔底和所述塔身组件上均对应的设有第一圆珠镶嵌孔和第二圆珠镶嵌孔,所述第一圆珠和所述第二圆珠分别安装在所述第一圆珠镶嵌孔和所述第二圆珠镶嵌孔内,按预设规律循环排列。
5.根据权利要求4所述的模体,其特征在于:所述预设规律为以一个所述第一圆珠、一个所述第二圆珠、两个所述第一圆珠、两个所述第二圆珠、三个所述第一圆珠、三个所述第二圆珠、四个所述第一圆珠、四个所述第二圆珠、五个所述第一圆珠、五个所述第二圆珠的顺序循环排列。
6.根据权利要求1所述的模体,其特征在于:所述基座塔底包括塔底第一端和塔底第二端,所述塔底第一端安装在所述基座上,所述塔身组件包括塔身第一端和塔身第二端,所述塔底第二端、所述塔身第一端及所述塔身第二端上均设有对应设置的定位孔,配置为通过插入定位件实现所述基座塔底和所述塔身组件之间或两个所述塔身组件之间的定位。
7.根据权利要求6所述的模体,其特征在于:所述基座塔底包括塔底侧壁,所述塔身组件包括塔身侧壁,所述基座侧壁靠近所述塔底第二端及所述塔身组件靠近所述塔身第一端和所述塔身第二端上均设有连接部,配置为通过连接件连接两个所述连接部实现所述基座塔底和所述塔身组件之间或两个所述塔身组件的连接。
8.根据权利要求7所述的模体,其特征在于:所述塔底侧壁靠近所述塔底第一端和所述塔身侧壁靠近所述塔身第一端上均设有循环指示部,所述圆珠组件从所述循环指示部指示的位置开始循环排列。
9.根据权利要求1所述的模体,其特征在于:所述基座包括安装部和基板,所述安装部固定在所述基板上,所述安装部包括呈圆柱体的收容腔,所述收容腔的半径等于所述基座塔底的外半径,配置为将所述基座塔底安装在所述安装部内。
10.根据权利要求1所述的模体,其特征在于:所述基座塔底和所述塔身组件为非金属材质,所述圆珠组件为金属材质。
技术总结
本技术提供了一种模体,用于机器人影像平台的螺旋标定,包括沿竖直方向依次连接的基座、基座塔底及N个塔身组件,其中,N为整数,且N≥0,所述基座塔底和所述塔身组件均为空心圆柱体,且所述基座塔底和所述塔身组件上设有圆珠组件,所述圆珠组件围绕所述基座塔底的旋转轴心线顺时针螺旋向上设置在所述基座塔底和所述塔身组件上。本技术通过在基座塔底和塔身组件上设置顺时针螺旋镶嵌的圆珠组件,便捷的实现通过扫描模体完成机器人影像平台的螺旋标定,标定准确快捷,易于识别。
技术研发人员:奚岩,阮威,刘文军
受保护的技术使用者:江苏一影医疗设备有限公司
技术研发日:20221012
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!