一种带有力反馈功能的血管介入手术机器人的制作方法
[]本技术属于医疗器械,具体地说是一种带有力反馈功能的血管介入手术机器人。
背景技术:
0、[背景技术]
1、近年来,随着生活水平的提高,心血管疾病已经成为全球致死率最高的一种疾病。血管介入手术需要操作医生有丰富的临床经验,大部分偏远地区出现医生少、患者多的现象,且医生在完成介入手术时,需要穿着厚重的铅服长时间暴露在射线下,这也使得介入手术医生劳动强度大,且患癌症的几率高。
2、血管介入机器人利用遥操作技术,操作者直接操作主端设备运动,控制器将控制信号发送给从端设备,从端同步完成对应的操作。主从操作的方法可以很好地解决医生在介入手术时的辐射问题,其远程遥操作的功能可以实现有经验的医生帮助医疗资源匮乏地区远程完成手术,实现医疗资源共享。
3、在实际手术中,医生需要通过手部推送导丝或导管的力反馈,结合dr设备曝光的图像来判断导丝或导管在血管中的运动情况。目前市面上的血管介入机器人实现力反馈的方式有,采用带有传感器的特制导丝或导管或者在从端设备安装大量的传感器,其实现方式复杂,且增加了手术成本。
技术实现思路
0、[
技术实现要素:
]
1、本实用新型的目的就是要解决上述的不足而提供一种带有力反馈功能的血管介入手术机器人,能够将导丝和导管在血管中的受力情况真实地采集出,并映射到主端操作机构,还原医生在操作时的临场感受,从而降低手术风险,提高手术精度。
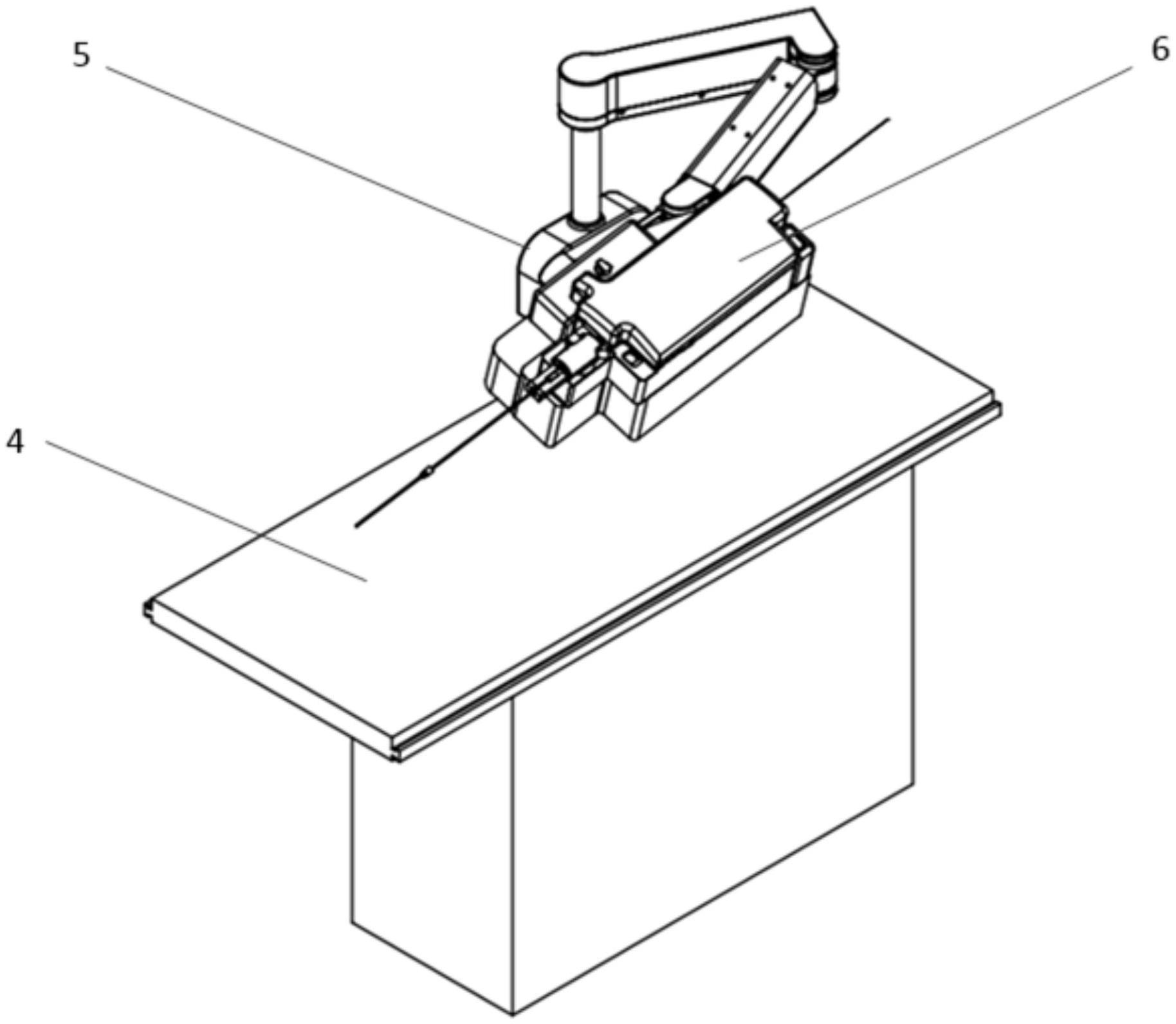
2、为实现上述目的设计一种带有力反馈功能的血管介入手术机器人,由主端机构和从端机构组成,所述主端机构包括显示器1、主端控制盒2和主端控制台3,所述主端控制盒2嵌入于主端控制台3中,所述显示器1用于显示图像;所述主端控制盒2上设置有导管前进与后退控制旋钮7、导丝旋转控制旋钮8、导丝前进与后退控制旋钮9、急停按钮10和使能按钮11,所述导管前进与后退控制旋钮7、导丝旋转控制旋钮8、导丝前进与后退控制旋钮9分别用于实现导管前进与后退控制、导丝旋转控制、导丝前进与后退控制,所述导管前进与后退控制旋钮7、导丝前进与后退控制旋钮9分别与导管力反馈装置、导丝力反馈装置相连,所述导管力反馈装置、导丝力反馈装置设于主端控制盒2中;所述从端机构包括手术台4、支架5和从端控制盒6,支架5固定于手术台4上,所述支架5的末端固定有从端控制盒6,并用于调节从端控制盒6的位姿,所述从端控制盒6上安装有从端控制机构力反馈系统。
3、进一步地,所述导丝力反馈装置包括主动轮12、力反馈机构13、编码器14和从动轮15,所述主动轮12通过皮带连接从动轮15,所述主动轮12上连接有导丝前进与后退控制旋钮9,所述力反馈机构13由电机和凸轮构成,所述电机的输出端连接凸轮,并带动凸轮运动,所述凸轮与皮带连接,所述凸轮给皮带施加压力的方式将力传递给导丝前进与后退控制旋钮9;所述编码器14与从动轮15相连接,所述编码器14用于获取主端控制导丝移动的距离。
4、进一步地,所述导管力反馈装置的结构与导丝力反馈装置相同。
5、进一步地,所述力反馈机构13实时地将从端机构采集到的导丝在血管中的受力大小映射至皮带上的压力,并传递至导丝前进与后退控制旋钮9,所述导丝前进与后退控制旋钮9通过旋钮力的方式反馈至医生操作端,所述导管前进与后退控制旋钮7的力反馈方式与导丝前进与后退控制旋钮9相同。
6、进一步地,所述从端控制机构力反馈系统包括相机16、支架二17、导丝或导管18和标记框19,所述从端控制盒6采用透明材料制作,所述支架二17、导丝或导管18、标记框19设于从端控制盒6上,所述导丝或导管18通过支架二17输送至人体通道处,所述导丝或导管18在标记框19中移动且运动范围不超出标记框19,所述标记框19为方形凹槽,所述相机16安装于从端控制盒6底部,所述相机16由下往上获取支架二17、导丝或导管18、标记框19的图像数据。
7、本实用新型同现有技术相比,具有如下优点:
8、(1)本实用新型利用机器视觉技术,将导丝和导管在血管中的受力情况真实地采集出,并映射到主端操作机构,还原医生在操作时的临场感受,从而降低手术风险,提高手术精度;
9、(2)本实用新型无需在导丝或导管前端以及从端机构内安装传感器即可精准地获得导丝或导管在血管中的受力情况,并且主端机构可以还原医生推送导丝及导管的手感;
10、(3)本实用新型不仅帮助医生避免在介入手术时长时间暴露在射线下,还能实现医疗资源的共享,在降低了手术成本的同时还提高了手术的精度,值得推广应用。
技术特征:
1.一种带有力反馈功能的血管介入手术机器人,其特征在于:由主端机构和从端机构组成,所述主端机构包括显示器(1)、主端控制盒(2)和主端控制台(3),所述主端控制盒(2)嵌入于主端控制台(3)中,所述显示器(1)用于显示图像;所述主端控制盒(2)上设置有导管前进与后退控制旋钮(7)、导丝旋转控制旋钮(8)、导丝前进与后退控制旋钮(9)、急停按钮(10)和使能按钮(11),所述导管前进与后退控制旋钮(7)、导丝旋转控制旋钮(8)、导丝前进与后退控制旋钮(9)分别用于实现导管前进与后退控制、导丝旋转控制、导丝前进与后退控制,所述导管前进与后退控制旋钮(7)、导丝前进与后退控制旋钮(9)分别与导管力反馈装置、导丝力反馈装置相连,所述导管力反馈装置、导丝力反馈装置设于主端控制盒(2)中;所述从端机构包括手术台(4)、支架(5)和从端控制盒(6),支架(5)固定于手术台(4)上,所述支架(5)的末端固定有从端控制盒(6),并用于调节从端控制盒(6)的位姿,所述从端控制盒(6)上安装有从端控制机构力反馈系统。
2.如权利要求1所述的带有力反馈功能的血管介入手术机器人,其特征在于:所述导丝力反馈装置包括主动轮(12)、力反馈机构(13)、编码器(14)和从动轮(15),所述主动轮(12)通过皮带连接从动轮(15),所述主动轮(12)上连接有导丝前进与后退控制旋钮(9),所述力反馈机构(13)由电机和凸轮构成,所述电机的输出端连接凸轮,并带动凸轮运动,所述凸轮与皮带连接,所述凸轮给皮带施加压力的方式将力传递给导丝前进与后退控制旋钮(9);所述编码器(14)与从动轮(15)相连接,所述编码器(14)用于获取主端控制导丝移动的距离。
3.如权利要求2所述的带有力反馈功能的血管介入手术机器人,其特征在于:所述导管力反馈装置的结构与导丝力反馈装置相同。
4.如权利要求2所述的带有力反馈功能的血管介入手术机器人,其特征在于:所述力反馈机构(13)实时地将从端机构采集到的导丝在血管中的受力大小映射至皮带上的压力,并传递至导丝前进与后退控制旋钮(9),所述导丝前进与后退控制旋钮(9)通过旋钮力的方式反馈至医生操作端,所述导管前进与后退控制旋钮(7)的力反馈方式与导丝前进与后退控制旋钮(9)相同。
5.如权利要求1所述的带有力反馈功能的血管介入手术机器人,其特征在于:所述从端控制机构力反馈系统包括相机(16)、支架二(17)、导丝或导管(18)和标记框(19),所述从端控制盒(6)采用透明材料制作,所述支架二(17)、导丝或导管(18)、标记框(19)设于从端控制盒(6)上,所述导丝或导管(18)通过支架二(17)输送至人体通道处,所述导丝或导管(18)在标记框(19)中移动且运动范围不超出标记框(19),所述标记框(19)为方形凹槽,所述相机(16)安装于从端控制盒(6)底部,所述相机(16)由下往上获取支架二(17)、导丝或导管(18)、标记框(19)的图像数据。
技术总结
本技术涉及一种带有力反馈功能的血管介入手术机器人,由主端机构和从端机构组成,主端机构包括显示器、主端控制盒和主端控制台,主端控制盒嵌入主端控制台中;主端控制盒上设有导管前进与后退控制旋钮、导丝旋转控制旋钮、导丝前进与后退控制旋钮,分别实现导管前进与后退控制、导丝旋转控制、导丝前进与后退控制,导管、导丝的前进与后退控制旋钮分别与导管力反馈装置、导丝力反馈装置相连;从端机构包括手术台、支架和从端控制盒,支架固定于手术台上,支架的末端固定有从端控制盒;本技术能够将导丝和导管在血管中的受力情况真实地采集出,并映射到主端操作机构,还原医生在操作时的临场感受,从而降低手术风险,提高手术精度。
技术研发人员:陈宇星,吴田,任娟
受保护的技术使用者:上海睿触科技有限公司
技术研发日:20221101
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!