一种手术机器人系统中机械手移动平台的外部连接机构的制作方法
本技术涉及机械,尤其涉及一种手术机器人系统中机械手移动平台的外部连接机构。
背景技术:
1、21世纪的外科手术发展趋势以精准和微创为主流,尤其以达芬奇手术机器人为代表的先进微创外科手术系统引导了国际医学机器人发展的方向其打破了传统手术的局限,也为微创手术领域带来革命性的变革,我国国内也大批次引进达芬奇手术机器人进行研究和应用。达芬奇手术机器人系统由三个部分组成:外科控制台、病人推车(安装有机械手的移动平台)和成像系统。在进行手术时,手术操作员(医生)在主远程控制台操控两个手柄,病人推车的机械手臂在接到控制信号后代替医生的左右手进行操作,成像系统则在机器人头顶悬灯的数据采集之后进行图像处理。
2、现有的达芬奇手术机器人在手术时,用于承载患者的手术推车与病人推车(安装有机械手的移动平台)之间缺少连接固定措施,手术推车的在术中的状态具有一定的不稳定性,这种不稳定性对于微创手术来说影响较大,容易使镜头观察的目标在视野内晃动,影响手术效果。
3、因此,有必要提供一种手术机器人系统中机械手移动平台的外部连接机构解决上述技术问题。
技术实现思路
1、针对上述情况,为克服现有技术缺陷,本实用新型提供了一种手术机器人系统中机械手移动平台的外部连接机构能够对手术推车起到加固作用,使手术推车在手术中的状态更加稳定。
2、为实现上述目的,本实用新型采用的技术方案如下:
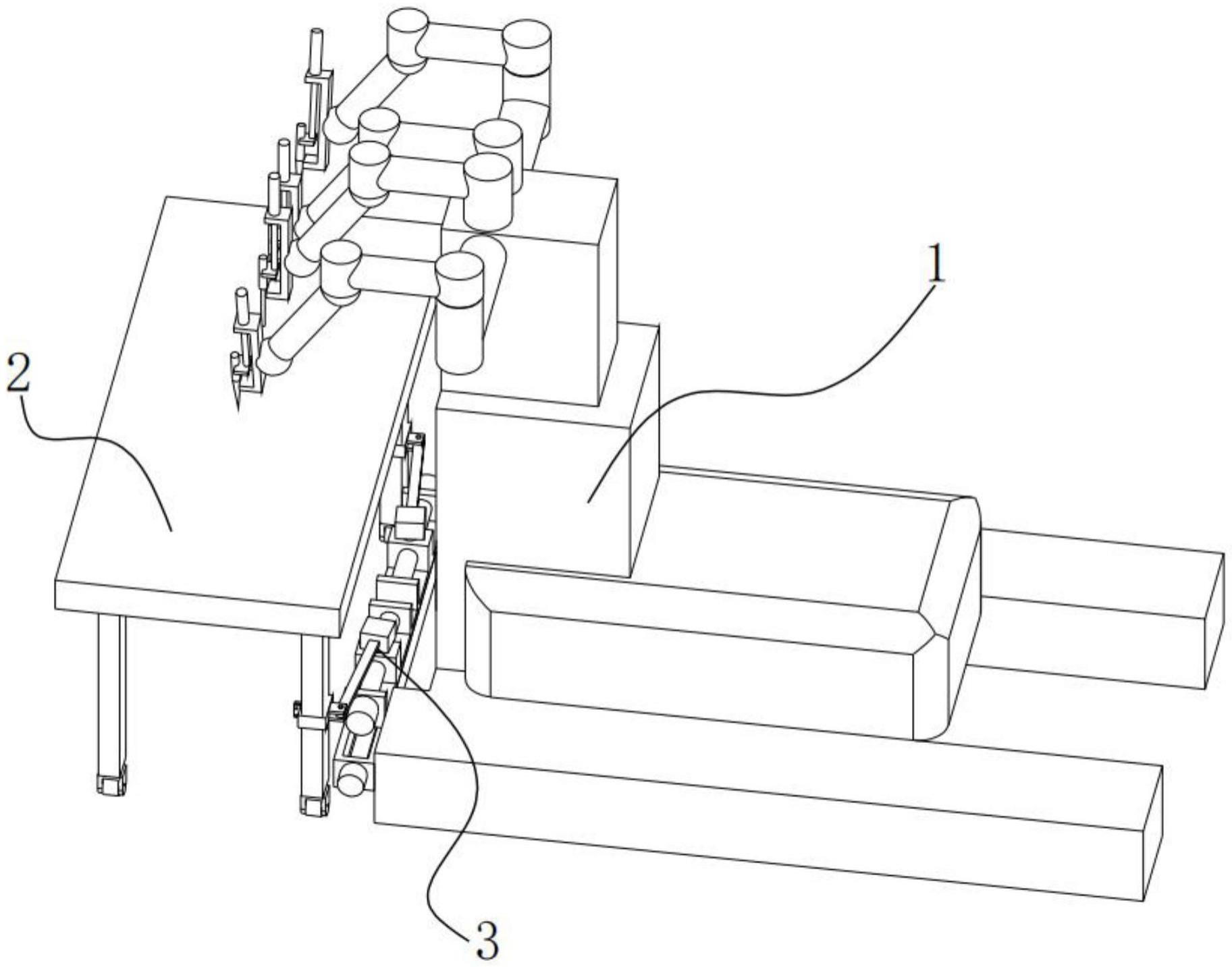
3、手术机器人系统中机械手移动平台的外部连接机构,包括:机械手移动平台、手术推车以及用于连接机械手移动平台、手术推车的连接机构,机械手移动平台上安装有用于手术的多个机械手,手术推车的底部安装有四个支撑腿,支撑腿底部安装有万向轮,所述连接机构包括安装在所述机械手移动平台一侧的第一轨道,所述第一轨道的顶部安装有能够沿着第一轨道横向移动的固定平台,所述固定平台上安装有两个连接组件,两个连接组件与相应的支撑腿连接。
4、优选的,所述第一轨道内安装有第一丝杆,所述第一丝杆与安装在所述固定平台底部的丝杆套连接,所述第一轨道的一侧安装有第一电机,所述第一电机的输出轴与所述第一丝杆连接。
5、优选的,所述连接组件包括安装在所述固定平台顶部的滑动块,所述滑动块的顶部安装有转动块,所述转动块的一侧安装有连接板,所述连接板的一端转动安装有连接套,连接套套设在所述手术推车的支撑腿上。
6、优选的,所述固定平台顶部安装有第二丝杆,所述第二丝杆贯穿所述滑动块,所述固定平台的一侧安装有第二电机,所述第二电机的输出轴与所述第二丝杆连接。
7、优选的,所述连接套的内壁安装有防滑垫,所述连接套的一侧安装有紧固螺栓。
8、优选的,所述连接套包括与所述连接板连接的固定卡套,所述固定卡套的一侧铰接安装有活动卡套,所述固定卡套与所述活动卡套的远端通过螺栓连接。
9、与现有技术相比,本实用新型具有以下有益效果:
10、(1)本实用新型通过在机械手移动平台、手术推车之间设置连接机构,能够对手术推车起到加固作用,使手术推车在手术中的状态更加稳定,通过设置可调节位置的固定平台和两个连接组件,能够对手术推车的位置进行调节,方便手术进行;
11、(2)本实用新型通过设置在第一轨道上安装第一丝杆和第一电机,能够方便驱动固定平台移动;
12、(3)本实用新型通过设置包括连接套、连接板、转动块、滑动块的连接组件,能够将手术推车与机械手移动平台进行连接;
13、(4)本实用新型通过设置第二丝杆和第二电机,能够通过第二电机使手术推车远离机械手移动平台,方便调节手术位置;
14、(5)本实用新型通过设置连接套的内壁安装防滑垫,所述连接套的一侧安装紧固螺栓,能够使连接套与手术推车之间的连接更加的稳定牢固;
15、(6)本实用新型通过设置包括固定卡套、活动卡套的连接套,能够方便连接手术推车。
技术特征:
1.一种手术机器人系统中机械手移动平台的外部连接机构,其特征在于,包括:
2.根据权利要求1所述的一种手术机器人系统中机械手移动平台的外部连接机构,其特征在于,所述第一轨道内安装有第一丝杆,所述第一丝杆与安装在所述固定平台底部的丝杆套连接,所述第一轨道的一侧安装有第一电机,所述第一电机与所述第一丝杆连接。
3.根据权利要求1所述的一种手术机器人系统中机械手移动平台的外部连接机构,其特征在于,所述连接组件包括安装在所述固定平台顶部的滑动块,所述滑动块的顶部安装有转动块,所述转动块的一侧安装有连接板,所述连接板的一端安装有连接套。
4.根据权利要求3所述的一种手术机器人系统中机械手移动平台的外部连接机构,其特征在于,所述固定平台顶部安装有第二丝杆,所述第二丝杆贯穿所述滑动块,所述固定平台的一侧安装有第二电机,所述第二电机与所述第二丝杆连接。
5.根据权利要求3所述的一种手术机器人系统中机械手移动平台的外部连接机构,其特征在于,所述连接套的内壁安装有防滑垫,所述连接套的一侧安装有紧固螺栓。
6.根据权利要求3所述的一种手术机器人系统中机械手移动平台的外部连接机构,其特征在于,所述连接套包括与所述连接板连接的固定卡套,所述固定卡套的一侧安装有活动卡套。
技术总结
本技术公开了一种手术机器人系统中机械手移动平台的外部连接机构。手术机器人系统中机械手移动平台的外部连接机构,包括:机械手移动平台、手术推车和连接机构;所述连接机构包括安装在所述机械手移动平台一侧的第一轨道,所述第一轨道的顶部安装有能够沿着第一轨道横向移动的固定平台,所述固定平台上安装有两个连接组件。本技术提供的手术机器人系统中机械手移动平台的外部连接机构通过在机械手移动平台、手术推车之间设置连接机构,能够对手术推车起到加固作用,使手术推车在手术中的状态更加稳定,通过设置可调节位置的固定平台和两个连接组件,能够对手术推车的位置进行调节,方便手术进行。
技术研发人员:徐素,陈百燚,高浩博,黄玥琳,陈慧男
受保护的技术使用者:徐素
技术研发日:20221104
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!