一种血管介入手术机器人的导管驱动装置的制作方法
本技术涉及医疗器械,特别是一种血管介入手术机器人的导管驱动装置。
背景技术:
1、微创血管介入手术是心脑血管疾病诊断、治疗的基本手段,目前实施的多数血管病变诊断、血管重建手术都需借助这项技术,微创血管介入手术机器人的使用能够有效提升手术过程中器械递送准确性与操控性,降低医生受到的累积辐射伤害,同时,手术操作中对器械的无菌性有着严格要求,需要保证与患者血管直接接触的器械不被操作机构所污染,中国专利申请号为202121709455.2的血管介入手术机器人的导管驱动装置,其有益效果为:通过侧连接方式与机器人上的驱动机构连接,从而解决现有技术中器械操作盒安装于驱动机构上方而导致的液体渗入驱动机构机体内发生腐蚀结构件或电气短路的问题,但是该装置在使用时,导管在随着驱动装置旋转时,会导致导管无法随着指定方向去移动,为此我们提供了一种血管介入手术机器人的导管驱动装置来解决上述问题。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述和/或现有的血管介入手术机器人的导管驱动装置中存在的问题,提出了本实用新型。
3、因此,本实用新型所要解决的问题在于该装置在使用时,导管在随着驱动装置旋转时,会导致导管无法随着指定方向去移动。
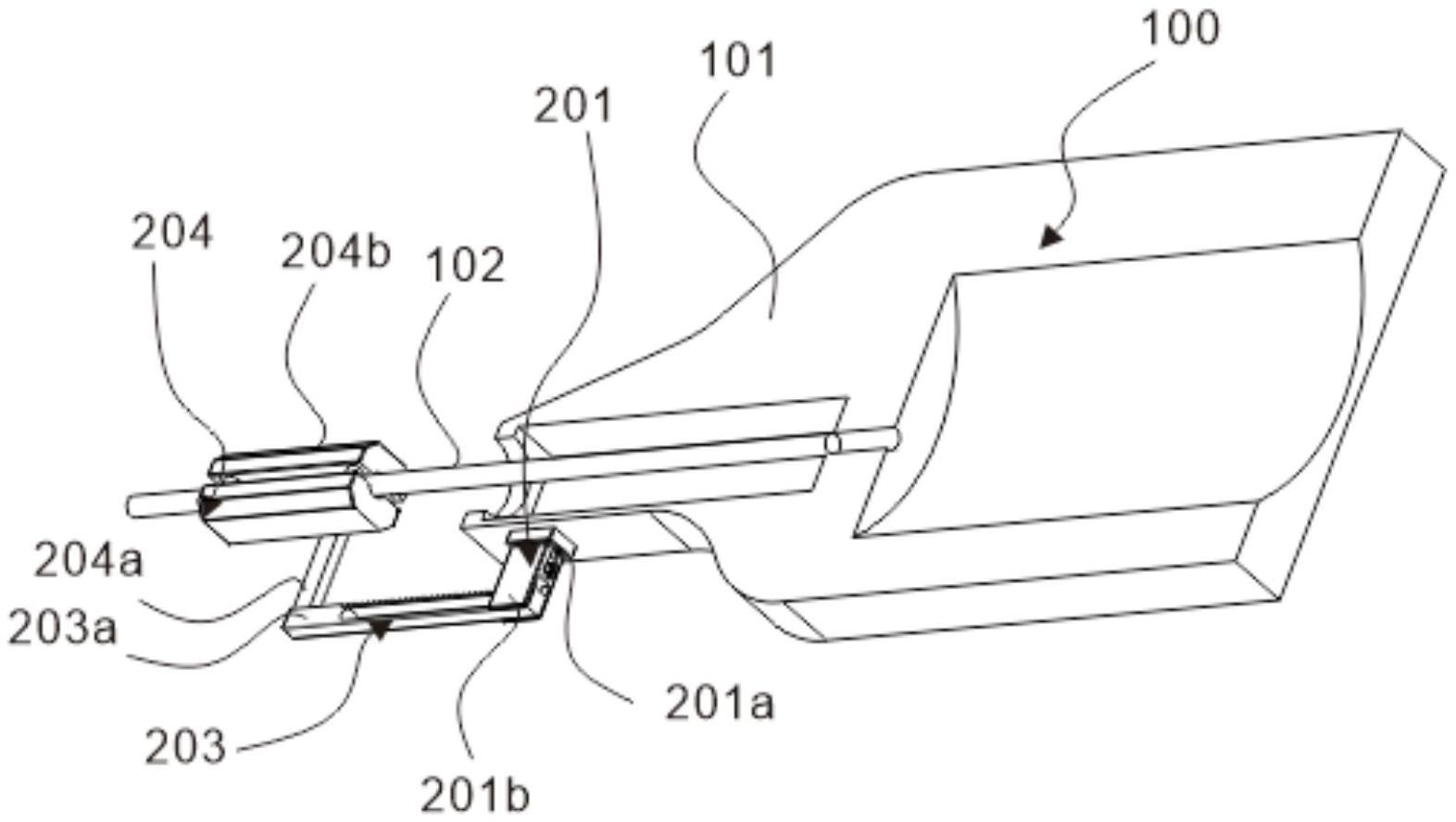
4、为解决上述技术问题,本实用新型提供如下技术方案:一种血管介入手术机器人的导管驱动装置,其包括,主体组件,包括盒体和导管,所述导管设置于所述盒体内;以及,
5、导向组件,设置于所述盒体一侧,包括固定件、限位件、伸缩件以及导向件,所述固定件设置于所述盒体一侧,所述限位件设置于所述固定件内,所述伸缩件设置于所述固定件内,所述导向件设置于所述伸缩件端部。
6、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述固定件包括固定座和固定支架,所述固定座设置于所述盒体一侧,所述固定支架设置于所述固定座底部。
7、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述固定件还包括支撑柱,所述固定支架内开设有滑槽,所述支撑柱设置于所述滑槽内。
8、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述限位件包括限位弹簧,所述固定支架内开设有限位槽,所述限位弹簧设置于所述限位槽内壁。
9、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述限位件还包括滑块和固定销,所述滑块设置于所述限位槽内,所述固定销设置于所述滑块一侧。
10、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述限位件还包括拉力弹簧和连接块,所述拉力弹簧设置于所述滑块内,所述连接块设置于所述拉力弹簧端部。
11、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述限位件还包括卡块和拉环,所述卡块设置于所述连接块一侧,所述拉环设置于所述卡块一侧。
12、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述伸缩件包括定位杆,所述定位杆设置于所述支撑柱表面,所述定位杆表面开设有卡槽和伸缩槽。
13、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述导向件包括固定杆和导向柱,所述固定杆设置于所述定位杆一侧,所述导向柱位于所述固定杆顶部。
14、作为本实用新型所述血管介入手术机器人的导管驱动装置的一种优选方案,其中:所述导向件还包括连接柱,所述连接柱设置于所述导向柱一侧,所述导向柱表面开设有导向槽。
15、本实用新型有益效果为:通过固定件对限位件的固定,通过限位件对伸缩件的限位,通过伸缩件对导向件的定位,解决了该装置在使用时,导管在随着驱动装置旋转时,会导致导管无法随着指定方向去移动的问题。
技术特征:
1.一种血管介入手术机器人的导管驱动装置,其特征在于:包括,
2.如权利要求1所述的血管介入手术机器人的导管驱动装置,其特征在于:所述固定件(201)包括固定座(201a)和固定支架(201b),所述固定座(201a)设置于所述盒体(101)一侧,所述固定支架(201b)设置于所述固定座(201a)底部。
3.如权利要求2所述的血管介入手术机器人的导管驱动装置,其特征在于:所述固定件(201)还包括支撑柱(201c),所述固定支架(201b)内开设有滑槽(u),所述支撑柱(201c)设置于所述滑槽(u)内。
4.如权利要求3所述的血管介入手术机器人的导管驱动装置,其特征在于:所述限位件(202)包括限位弹簧(202a),所述固定支架(201b)内开设有限位槽(v),所述限位弹簧(202a)设置于所述限位槽(v)内壁。
5.如权利要求4所述的血管介入手术机器人的导管驱动装置,其特征在于:所述限位件(202)还包括滑块(202b)和固定销(202c),所述滑块(202b)设置于所述限位槽(v)内,所述固定销(202c)设置于所述滑块(202b)一侧。
6.如权利要求5所述的血管介入手术机器人的导管驱动装置,其特征在于:所述限位件(202)还包括拉力弹簧(202d)和连接块(202e),所述拉力弹簧(202d)设置于所述滑块(202b)内,所述连接块(202e)设置于所述拉力弹簧(202d)端部。
7.如权利要求6所述的血管介入手术机器人的导管驱动装置,其特征在于:所述限位件(202)还包括卡块(202f)和拉环(202g),所述卡块(202f)设置于所述连接块(202e)一侧,所述拉环(202g)设置于所述卡块(202f)一侧。
8.如权利要求6或7所述的血管介入手术机器人的导管驱动装置,其特征在于:所述伸缩件(203)包括定位杆(203a),所述定位杆(203a)设置于所述支撑柱(201c)表面,所述定位杆(203a)表面开设有卡槽(w)和伸缩槽(x)。
9.如权利要求8所述的血管介入手术机器人的导管驱动装置,其特征在于:所述导向件(204)包括固定杆(204a)和导向柱(204b),所述固定杆(204a)设置于所述定位杆(203a)一侧,所述导向柱(204b)位于所述固定杆(204a)顶部。
10.如权利要求9所述的血管介入手术机器人的导管驱动装置,其特征在于:所述导向件(204)还包括连接柱(204c),所述连接柱(204c)设置于所述导向柱(204b)一侧,所述导向柱(204b)表面开设有导向槽(y)。
技术总结
本技术公开了一种血管介入手术机器人的导管驱动装置,包括主体组件,包括盒体和导管,所述导管设置于所述盒体内;以及,导向组件,设置于所述盒体一侧,包括固定件、限位件、伸缩件以及导向件,所述固定件设置于所述盒体一侧,所述限位件设置于所述固定件内,所述伸缩件设置于所述固定件内,所述导向件设置于所述伸缩件端部。本技术有益效果为:通过固定件对限位件的固定,通过限位件对伸缩件的限位,通过伸缩件对导向件的定位,解决了该装置在使用时,导管在随着驱动装置旋转时,会导致导管无法随着指定方向去移动的问题。
技术研发人员:施丽,徐安晨,卜彦峰,郑雪凯
受保护的技术使用者:海生医疗科技(宁波)有限公司
技术研发日:20221118
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!