仿生手术器械的制作方法
本申请实施例涉及医疗器械,尤其涉及一种手柄控制器械。
背景技术:
1、微创外科手术是指通过在人体体表穿刺形成若干手术通道,对腹腔、胸腔、盆腔或关节腔内的器官病灶进行切除或修补等;或经人体自然腔道如口腔、尿道、直肠、阴道等,将内窥镜和操作器械通过上述途径进入体腔内,由术者在内窥镜的监视下,通过术者在病人体外操作器械,借助器械工作端伸入病人体腔内,并对腔内的病灶进行切除或对器官进行修补、缝合等操作,并于术毕后将内窥镜和器械取出,缝合体表的小孔或自然腔道切口即可完成整个手术。
2、有鉴于此,本申请的主要目的在于提供一种用于辅助执行微创外科手术的手术器械。
技术实现思路
1、鉴于上述问题,本申请提供一种仿生手术器械,以克服上述问题或者至少部分地解决上述问题。
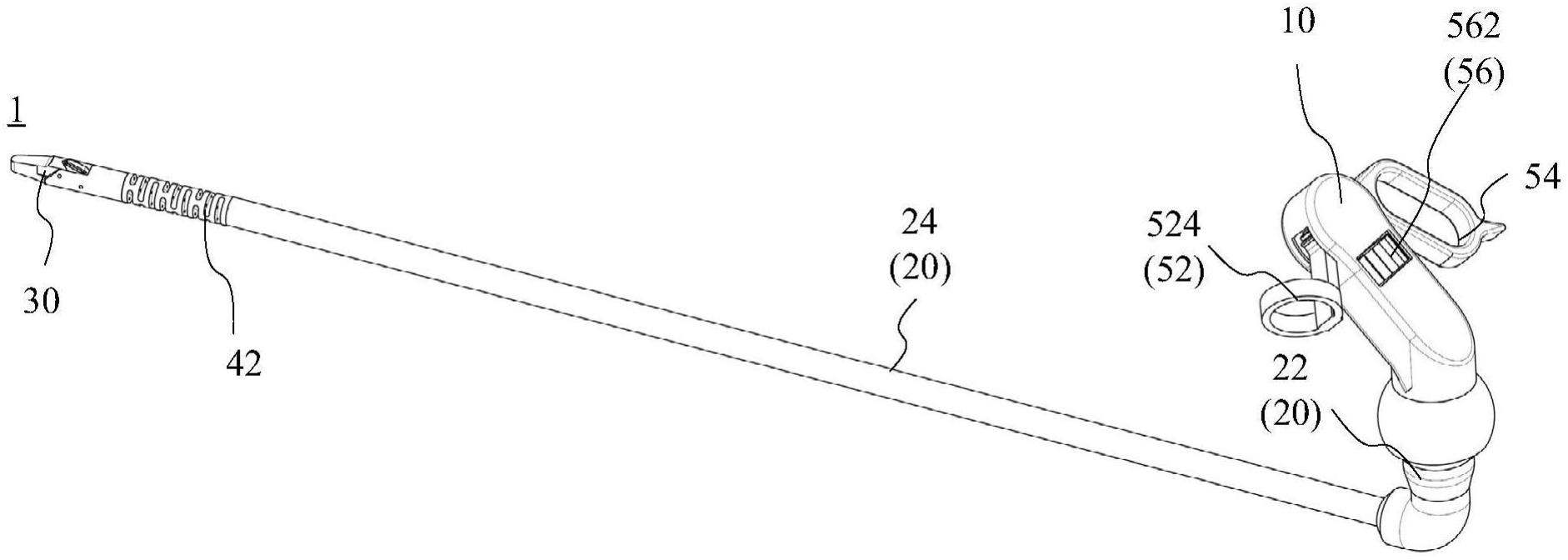
2、本申请实施例提供一种仿生手术器械,包括:手柄;延伸件,其连接所述手柄并可相对于所述手柄挠动;功能件,其设于所述延伸件的端部;其中,当术者握持于所述手柄上时,所述延伸件相对于所述手柄的挠动中心位于所述术者的手掌的下方;所述手柄可受力相对于所述延伸件挠动,以调节所述功能件的操作位置。
3、可选地,所述延伸件相对于所述手柄的挠动中心与所述术者的掌心的距离不超过10cm。
4、可选地,所述延伸件包括:第一连杆,其连接所述手柄,并自所述手柄的端部垂直向下延伸;第二连杆,其连接所述第一连杆,并自所述第一连杆的端部横向延伸;所述手柄可相对于所述第一连杆挠动,以经由所述第二连杆调整所述功能件的定位轴向;所述手柄的手柄轴线与所述第二连杆的第二轴线之间形成不大于90度的夹角。
5、可选地,所述第二连杆的所述第二轴线沿垂直于所述第一连杆的第一轴线,使得所述第一连杆与第二连杆之间形成直角。
6、可选地,所述器械还包括:头端可弯曲结构,其连接所述第二连杆与所述功能件;尾端可弯曲结构,其连接所述第一连杆与所述手柄;其中,所述尾端可弯曲结构可受力沿不同方向弯曲,并驱动所述头端可弯曲结构沿不同方向联动作动,以调整所述功能件的操作位置。
7、可选地,所述手柄和所述第一连杆分别定位所述尾端可弯曲结构的第一端和第二端;通过控制所述手柄相对于所述第一连杆沿不同方向转动,以调整所述第二端相对于所述第一端的定位位置,使得所述尾端可弯曲结构沿不同方向弯曲。
8、可选地,所述第一连杆包括可定位所述第二端的调节套接部,所述手柄包括可定位所述第一端的定位套接部;所述调节套接部与所述定位套接部可活动地相互套接,以形成容置所述尾端可弯曲结构的容置空间;所述调节套接部可相对于所述定位套接部挠动,以调节所述第二端相对于所述第一端的定位位置。
9、可选地,所述器械还包括设于所述手柄上的操作件,其经由驱动轴连接所述延伸件并可相对于所述手柄在作用位置与非作用位置之间往复移动,以驱动所述延伸件沿其轴向往复移动;其中,所述操作件相对于所述驱动轴轴向固定且周向转动,当所述操作件相对于所述手柄在作用位置与非作用位置之间往复移动时,可驱动所述驱动轴轴向移动,借以驱动所述延伸件沿其轴向往复移动,使得所述功能件在作用状态与非作用状态之间切换。
10、可选地,当所述术者握持于所述手柄上时,所述术者的拇指可穿设于所述操作件中,以驱动所述操作件在所述作用位置与所述非作用位置之间往复移动。
11、可选地,所述器械还包括锁定件;其中,当所述术者握持于所述手柄上时,所述术者的食指和或中指可穿设于所述锁定件中,以驱动所述锁定件相对于所述手柄在锁定位置和非锁定位置之间切换,从而允许或限制所述操作件相对于所述手柄的移动作动。
12、可选地,所述器械还包括设于所述手柄上的自转件,其连接所述延伸件并可相对于所述手柄周向转动,以经由所述延伸件驱动所述功能件执行转动作动。
13、可选地,当所述术者握持于所述手柄上时,所述自转件位于所述术者的拇指的可操作范围内。
14、可选地,所述器械还包括:驱动轴,其连接所述自转件;第一齿轮,其设于所述驱动轴接近所述第一连杆的端部;第二齿轮,其设于所述第一连杆接近所述手柄的端部,并与所述第一齿轮啮合;第三齿轮,其设于所述第一连杆接近所述第二连杆的端部;第四齿轮,其设于所述第二连杆接近所述第一连杆的端部,并与所述第三齿轮啮合;
15、可选地,其中,当所述自转件相对于所述手柄周向转动时,可驱动所述第一连杆周向转动,并经由所述第一连杆驱动所述第二连杆周向转动,以令所述功能件执行转动作动。
16、可选地,所述功能件包括手术钳、手术剪中的一个。
17、综上所述,本申请的仿生手术器械,在操作手柄时,手柄的挠动中心位于术者的手掌下方,此结构设计符合人体设计工学,可以提高术者的操作感受。
18、再者,本申请的仿生手术器械还可提供直觉式的控制形式,控制与效应逻辑简单,无需特殊培训即可上手操作,可降低手术壁垒,扩大适应症范围。
19、此外,本申请的仿生手术器械还手柄体积小巧,可避免不同手术器械之间在手术过程中的相互撞击,以提高手术的流畅度,缩短手术时间。
20、另外,本申请的仿生手术器械,通过增加功能件的自转控制,可在功能件定位于不同操作位置的同时,便利的实现功能件的自转旋转,扩大了操作灵活性和器械的适用范围,可在视野侧面视角盲区剪切及缝合操作中提供较佳的表现。
技术特征:
1.一种仿生手术器械,包括:
2.根据权利要求1所述的器械,其特征在于,所述延伸件相对于所述手柄的挠动中心与所述术者的掌心的距离不超过10cm。
3.根据权利要求1所述的器械,其特征在于,所述延伸件包括:
4.根据权利要求3所述的器械,其特征在于,所述第二连杆的所述第二轴线沿垂直于所述第一连杆的第一轴线,使得所述第一连杆与第二连杆之间形成直角。
5.根据权利要求3所述的器械,其特征在于,所述器械还包括:
6.根据权利要求5所述的器械,其特征在于,所述手柄和所述第一连杆分别定位所述尾端可弯曲结构的第一端和第二端;
7.根据权利要求6所述的器械,其特征在于,所述第一连杆包括可定位所述第二端的调节套接部,所述手柄包括可定位所述第一端的定位套接部;
8.根据权利要求1或3所述的器械,其特征在于,所述器械还包括设于所述手柄上的操作件,其经由驱动轴连接所述延伸件并可相对于所述手柄在作用位置与非作用位置之间往复移动;
9.根据权利要求8所述的器械,其特征在于,当所述术者握持于所述手柄上时,所述术者的拇指可穿设于所述操作件中,以驱动所述操作件在所述作用位置与所述非作用位置之间往复移动。
10.根据权利要求8所述的器械,其特征在于,所述器械还包括锁定件;
11.根据权利要求3所述的器械,其特征在于,所述器械还包括设于所述手柄上的自转件,其连接所述延伸件并可相对于所述手柄周向转动,以经由所述延伸件驱动所述功能件执行转动作动。
12.根据权利要求11所述的器械,其特征在于,当所述术者握持于所述手柄上时,所述自转件位于所述术者的拇指或中指的可操作范围内。
13.根据权利要求11所述的器械,其特征在于,所述器械还包括:
14.根据权利要求1所述的器械,其特征在于,所述功能件包括手术钳、手术剪中的一个。
技术总结
本申请提供一种仿生手术器械包括手柄、连接手柄并可相对于手柄挠动的延伸件、设于延伸件的端部的功能件,其中,当术者握持于手柄上时,延伸件相对于手柄的挠动中心位于术者的手掌下方,手柄可受力相对于延伸件挠动,以调节功能件的操作位置。据此,本申请的仿生手术器械可提供直觉式控制以及较佳地操作手感,可提高器械操作的准确性。
技术研发人员:刘鹏,董旻辉,薛文俊
受保护的技术使用者:上海东方医疗创新研究院
技术研发日:20221124
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!