限位机构、吊装机械臂及微创手术机器人的制作方法
本技术涉及医疗机器人,具体地说,涉及限位机构、吊装机械臂及微创手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。然而,微创手术中微创器械由于受到切口大小的限制,手术操作难度大为增加,且医生在长时间手术过程中的疲劳、颤抖等动作会被放大,这成为制约微创手术技术发展的关键因素。随着机器人技术的发展,一种可以克服缺点、继承优点的微创医疗领域新技术——微创手术机器人技术应运而生。
2、常见的微创手术机器人由医生控制台、患者侧手推车和显示设备组成,外科医生在医生控制台操作输入装置,并将输入传给与远程操作的外科器械连接的患者侧手推车。基于在医生控制台的外科医生的输入,远程操作的外科器械在患者侧手推车处被致动以对患者动手术,从而产生医生控制台和在患者侧手推车的外科器械之间的主从控制关系。
3、中国发明专利申请cn101106952a中公开了一种机器人手术的模块化机械手支架,其包括定向平台36(即相当于前面提到的旋转平台)、相对基座可移动支承定向平台的平台连杆机构以及安装于定向平台的多个机械手32,其中各机械手32可移动支承相关器械。该平台36可以绕轴sjc1旋转,但旋转角度没有限位。
4、上述旋转平台的方案可以实现沿周向的转动,但是旋转角度没有限位,会导致机械手被致动时可能偏离有效的手术操作空间,对于不熟练的助力护士来说,也是一项挑战,增加了手术准备的时间。而且,即使使用软件对旋转角度进行限位,也会发生软件失效的情况。
技术实现思路
1、针对现有技术中存在的上述问题,本实用新型提供了限位机构、吊装机械臂及微创手术机器人。
2、为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
3、限位机构,用于限定手术机器人旋转平台的旋转角度,其包括,
4、第一限位部,设于与所述旋转平台连接的伸展臂的第一连接轴处;
5、第二限位部,设于所述旋转平台的第二连接轴处;
6、所述伸展臂和所述旋转平台之间可相对转动;于所述第一限位部和所述第二限位部相配合的状态下,实现所述旋转平台相对于所述伸展臂在期望角度范围内的旋转限位。
7、作为优选,以所述旋转平台的转动中心为原点,以伸展臂的轴线为中轴线且远离所述旋转平台的方向为正方向,所述期望角度范围为-90°至+90°。
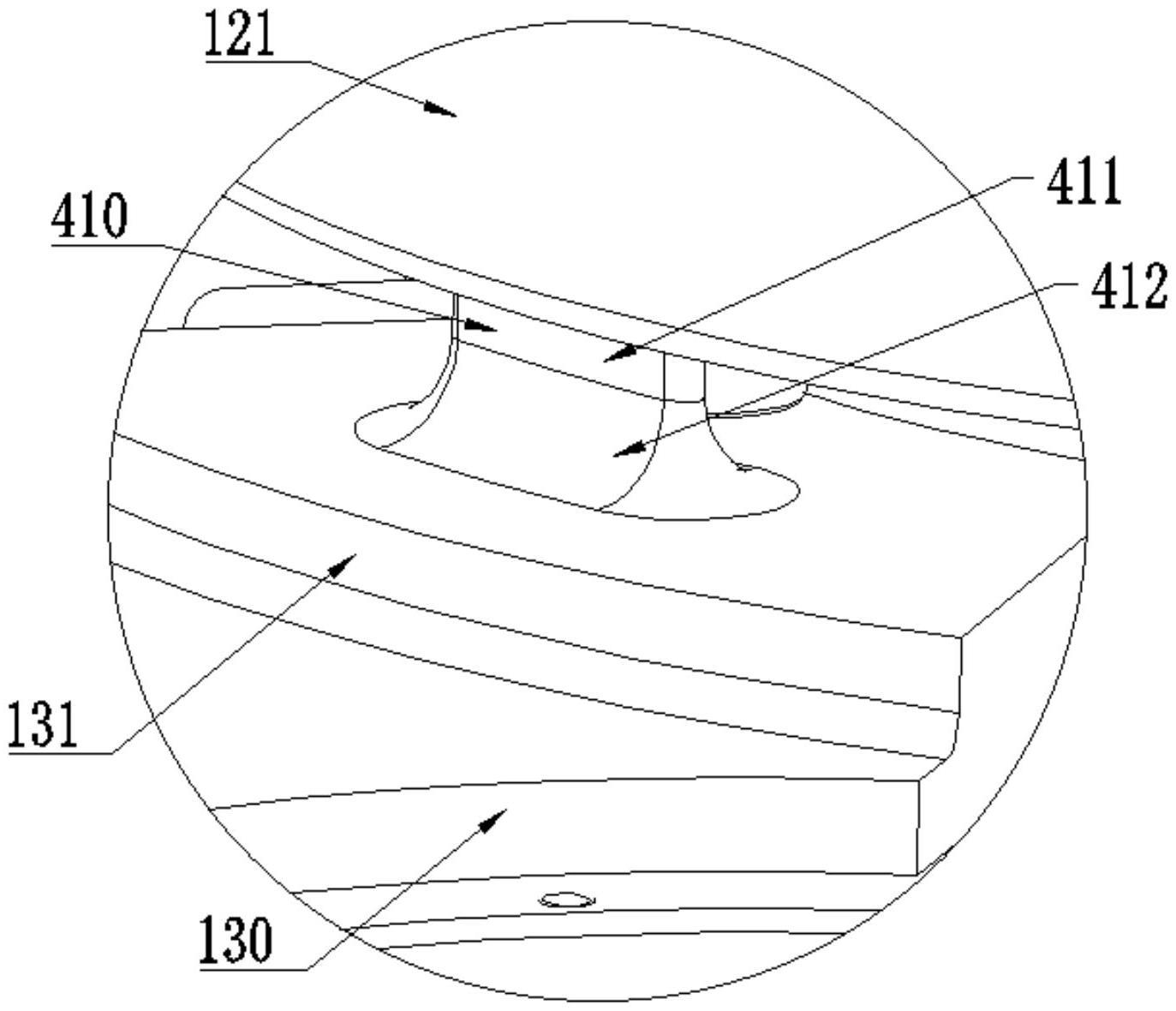
8、作为优选,所述第一限位部包括限位槽;
9、所述第二限位部包括可伸入至所述限位槽内的限位块;
10、所述限位槽沿所述第一连接轴或所述第二连接轴的周向方向延伸设置且呈弧形。
11、作为优选,所述第一限位部包括限位块;
12、所述第二限位部包括供所述限位块伸入的限位槽;
13、所述限位槽沿所述第一连接轴或所述第二连接轴的周向方向延伸设置且呈弧形。
14、作为优选,所述限位块沿所述限位槽的延伸方向延伸设置且呈类弧形或圆柱形。
15、作为优选,所述限位槽相对于所述旋转平台的转动中心呈大于180°的角度设置,该角度与180°的差值为所述限位块的外轮廓相对于所述旋转平台的转动中心的角度大小。
16、作为优选,所述限位块远离所述限位槽的端部设有用于提高所述限位块强度的过渡部,所述过渡部呈自所述限位块的侧壁向外延伸的圆弧面。
17、作为优选,所述限位块沿所述旋转平台的转动方向的一端或两端的外形与相对应的所述限位槽的一端或两端的外形相匹配。
18、吊装机械臂,包括横臂,所述伸展臂于所述横臂内可线性移动,还包括上述的限位机构,于所述旋转平台和所述伸展臂之间设置该限位机构。
19、微创手术机器人,包括主控台和从操作设备;还包括上述的吊装机械臂,所述从操作设备处安装有该吊装机械臂。
20、本实用新型至少具备以下有益效果:
21、1、通过限位槽和限位块的设置,使得旋转平台只能够在期望的角度范围内转动,可以保证机械手始终位于有效的手术操作空间内,且将期望角度设置为以伸展臂轴线为对称中心的180°,能有效避免机械手与手术室中的麻醉机等其他设备干涉。
22、2、本申请中限位块沿限位槽的延伸方向延伸设置且呈弧形,同时在限位块朝向第二连接轴的端部设置过渡部,能够保证限位块的结构强度,防止损坏导致限位失效。
23、3、通过第一端面和第三端面以及第二端面和第四端面的配合,能够进一步保证限位块的结构强度,同时,避免第一端面和第三端面以及第二端面和第四端面在碰撞下产生凹陷或断裂对期望角度的精准度造成影响。
技术特征:
1.限位机构,用于限定手术机器人旋转平台的旋转角度,其特征在于:包括,
2.根据权利要求1所述的限位机构,其特征在于:
3.根据权利要求2所述的限位机构,其特征在于:
4.根据权利要求2所述的限位机构,其特征在于:
5.根据权利要求3或4所述的限位机构,其特征在于:所述限位块沿所述限位槽的延伸方向延伸设置且呈类弧形或圆柱形。
6.根据权利要求3或4所述的限位机构,其特征在于:
7.根据权利要求3或4所述的限位机构,其特征在于:所述限位块远离所述限位槽的端部设有用于提高所述限位块强度的过渡部,所述过渡部呈自所述限位块的侧壁向外延伸的圆弧面。
8.根据权利要求6所述的限位机构,其特征在于:所述限位块沿所述旋转平台的转动方向的一端或两端的外形与相对应的所述限位槽的一端或两端的外形相匹配。
9.吊装机械臂,包括横臂,所述伸展臂于所述横臂内可线性移动,其特征在于:还包括如权利要求1-8任一所述的限位机构,于所述旋转平台和所述伸展臂之间设置该限位机构。
10.微创手术机器人,包括主控台和从操作设备,其特征在于:还包括如权利要求9所述的吊装机械臂,所述从操作设备处安装有该吊装机械臂。
技术总结
本技术涉及医疗机器人技术领域,具体地说,涉及限位机构、吊装机械臂及微创手术机器人;限位机构,包括第一限位部,设于伸展臂处;第二限位部,设于旋转平台处;于第一限位部和第二限位部相配合的状态下,实现旋转平台相对于伸展臂在期望角度内的旋转限位;吊装机械臂,包括横臂,伸展臂于横臂内可线性移动,还包括上述的限位机构,于旋转平台和伸展臂之间设置该限位机构;微创手术机器人,包括主控台和从操作设备,还包括上述的吊装机械臂,从操作设备处安装有该吊装机械臂;通过第一限位部和第二限位部的配合,使得旋转平台在期望角度内转动,保证了机械手始终位于有效的手术操作空间内;同时,避免了与手术室中的麻醉机等设备的干涉。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:20221129
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!