一种可变高度的移乘搬运式下肢康复机器人
本技术涉及康复机器人领域,具体是一种可变高度的移乘搬运式下肢康复机器人。
背景技术:
1、人口老龄化问题已成为全球共同的社会问题,半失能老人数量不断增加,为减轻老人护理负担及照顾到老人独自起居的意愿,移位机即移乘机器人开始出现。移位机是一种帮助下肢体障碍者进行移乘搬运的康复辅具,可极大减轻护理人员的工作负担。移乘搬运是指把行动不便的被护理人从床上转移到轮椅,或从轮椅转移到床上、卫生间等体力劳动。
2、目前市面上已出现多种移位机,但是它们大多都需要护理人员辅助使用者使用,没能解放护理人员的劳动力,自动化程度较差,功能较为单一。申请号为201710340526.8的文献公开了一种移乘搬运护理机器人,能够实现移乘功能,但其只能单一的实现机械搬运功能,对于存在下肢障碍的病人而言,其更渴望在移乘的基础上增加下肢康复功能。并且其机构的工作状态座椅高度固定,应用对象范围比较局限。因此,有必要设计一种能实现老人或不同程度下肢障碍的病人完成自主转移并增加下肢训练功能的机器人。
技术实现思路
1、针对现有技术的不足,本实用新型拟解决的技术问题是,提供一种可变高度的移乘搬运式下肢康复机器人。
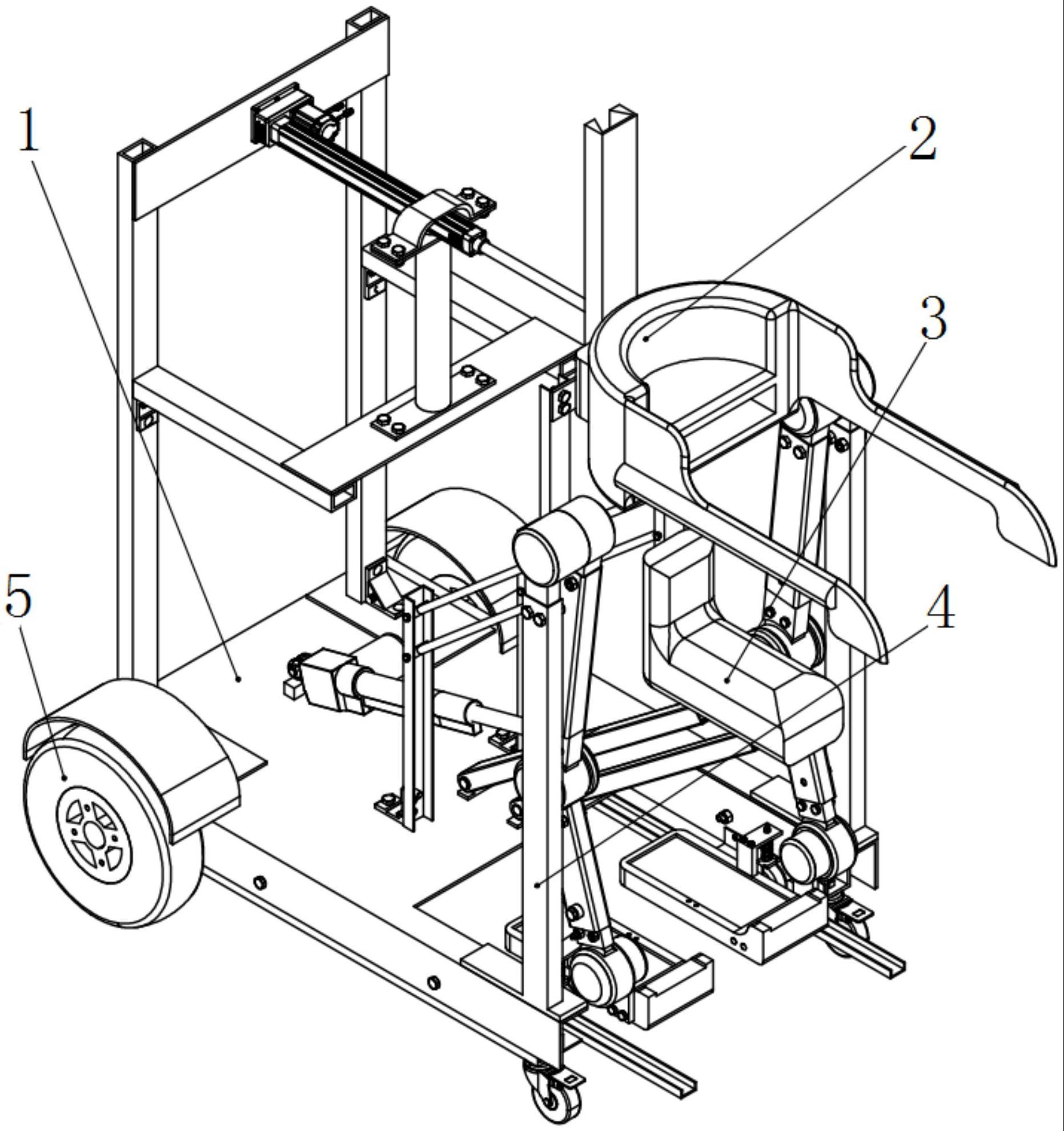
2、本实用新型解决所述技术问题的技术方案是,提供一种可变高度的移乘搬运式下肢康复机器人,其特征在于,该机器人包括机架、移乘搬运装置、升降座椅装置、下肢训练装置和移动装置;
3、升降座椅装置具有升降功能,机器人处于坐姿工作位时用于使用者坐于其上;移动装置用于机器人的移动;
4、所述移乘搬运装置包括移乘搬运装置架体、电动推杆一、滑块、滑轨组件、控制台、夹持手臂、连杆一、连杆二和连杆三;
5、移乘搬运装置架体的底部固定于机架上;电动推杆一的壳体固定于移乘搬运装置架体上,电动推杆一的输出端水平输出;电动推杆一的输出末端固定有滑块;连杆三竖直固定于机架上;两个连杆二相互平行设置,其一端均铰接于连杆三上,另一端均与连杆一铰接;连杆一、两个连杆二和连杆三构成平行四边形机构;控制台、连杆一与滑轨组件三者相互固定连接;滑轨组件内开有竖直方向的滑轨;滑块滑动设置于滑轨组件的竖直滑轨中;夹持手臂固定于控制台上,为使用者提供支撑力;
6、所述下肢训练装置包括髋关节连接件一、髋关节连接件二、大腿外骨骼、膝关节连接件一、膝关节连接件二、小腿外骨骼、踝关节连接件一、踝关节连接件二、脚部外骨骼、外骨骼支架、弹簧、轮毂支架、轮毂电机、底轮、底轮轨道、l形板和移动轴;
7、外骨骼支架固定于机架上;髋关节连接件二固定于外骨骼支架上;髋关节连接件一转动安装于髋关节连接件二上;大腿外骨骼的一端与髋关节连接件一固定连接,另一端与膝关节连接件一固定连接;膝关节连接件二转动安装于膝关节连接件一上;小腿外骨骼的一端与膝关节连接件二固定连接,另一端与踝关节连接件二固定连接;踝关节连接件一转动安装于踝关节连接件二上;脚部外骨骼固定于踝关节连接件一上;
8、脚部外骨骼的一侧固定有l型板;底轮轨道通过轨道固定板固定于机架上;底轮转动安装于轮毂支架中;轮毂电机的壳体固定于轮毂支架上,其输出端与底轮的轴心固定连接;底轮设置于底轮轨道中;移动轴的一端固定于轮毂支架的顶部,另一端滑动设置于l形板的通孔中,轮毂支架与l形板形成移动副;弹簧嵌套在移动轴上,一端与轮毂支架接触或固定连接,另一端与l型板接触或固定连接,保证底轮始终与底轮轨道接触。
9、与现有技术相比,本实用新型的有益效果在于:
10、(1)本实用新型在实现移乘搬运功能的同时,加入下肢康复训练功能,并将两个功能有机结合。相比于传统的移乘搬运机器人,具有舒适性好、功能丰富、应用对象广泛等优点。
11、(2)本实用新型的移乘搬运装置能够实现使用者在床上与机器人之间的移乘搬运,同时能够实现使用者在机器人上站姿状态与坐姿状态的相互转换,便于实现站姿状态下的下肢康复训练。
12、(3)本实用新型的移乘搬运装置中,电动推杆一的水平直线运动转换成夹持手臂的弧线运动,通过一个方向运动可以同时实现两个方向的运动,减少了动力原件的数量,便于下一步对装置的控制。通过平行四边形机构保证在移乘搬运过程中,夹持手臂始终与地面保持平行,使用者上身始终保持竖直。
13、(4)本实用新型通过旋转升降的方式实现座椅的升降,同时通过平行四边形机构保证在坐立转换过程中座椅与地面始终保持平行。
14、(5)本实用新型的下肢训练装置中,使用者在站姿状态下,通过脚部动力带动整个下肢运动,通过弹簧使底轮始终贴紧底轮轨道,从而实现脚部的高度变化,在只使用一组轮毂电机的情况下对使用者进行康复训练,减少了电机的数量,不但节省了成本,并且相比多电机外骨骼具有舒适性好、执行简单、定量化、可重复性强等优点,能进行更贴近人体步态的康复训练。
15、(6)本实用新型采用电动推杆作为动力部件,不需要复杂的成套系统支持,同时节约大量空间;在无维护的情况下,可以安全可靠的工作;没有油污的污染,还可以大幅度降低噪音,保持洁净安静的工作环境;输出力矩大,运行平稳,能够保证移乘搬运的平稳性与可靠性,保证坐立姿态的顺利转换。
16、(7)本实用新型的移乘搬运装置和下肢训练装置的长度均可调节,可适应不同高度的使用者,应用对象范围广。
技术特征:
1.一种可变高度的移乘搬运式下肢康复机器人,其特征在于,该机器人包括机架、移乘搬运装置、升降座椅装置、下肢训练装置和移动装置;
2.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,移乘搬运装置还包括电动推杆支撑件;电动推杆支撑件的底部固定于移乘搬运装置架体的水平板上,顶部与电动推杆一的壳体固定连接,进一步支撑电动推杆一,进一步保证电动推杆一的输出端水平输出。
3.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,滑块采用楔形滑块或梯形滑块。
4.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,所述升降座椅装置包括电动推杆二、平行升降杆和座椅;
5.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,大腿外骨骼的长度可自由调整并通过紧固螺栓固定长度,以适应不同使用者的大腿长度。
6.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,小腿外骨骼的长度可自由调整并通过紧固螺栓固定长度,以适应不同使用者的小腿长度。
7.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,大腿外骨骼上设置有绑带,用于与人体的大腿固定。
8.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,小腿外骨骼上设置有绑带,用于与人体的小腿固定。
9.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,脚部外骨骼上设置有绑带,用于与人体的脚部固定。
10.根据权利要求1所述的可变高度的移乘搬运式下肢康复机器人,其特征在于,底轮轨道还能够插入床的底部,起到固定机器人的作用。
技术总结
本技术公开了一种可变高度的移乘搬运式下肢康复机器人,包括机架、移乘搬运装置、升降座椅装置、下肢训练装置和移动装置;移乘搬运装置能够实现使用者在床上与机器人之间的移乘搬运,能够实现使用者在机器人上站姿状态与坐姿状态的相互转换,便于实现站姿下的下肢康复训练;升降座椅装置具有升降功能,机器人处于坐姿工作位时用于使用者坐于其上;下肢训练装置用于使用者在站姿状态下通过脚部动力实现末端牵引带动腿部关节运动,从而实现腿部康复训练功能;移动装置用于机器人的移动。本技术在实现移乘搬运功能的同时,加入下肢康复训练功能,并将两个功能有机结合,具有舒适性好、功能丰富、应用对象广泛等优点。
技术研发人员:张争艳,李禧龙,徐嘉骏,蒋飞飞,白广城
受保护的技术使用者:河北工业大学
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!