一种快速更换和释放的穿刺导向装置的制作方法
[]本技术涉及医疗器械,具体地说是一种快速更换和释放的穿刺导向装置。
背景技术:
0、[背景技术]
1、在临床穿刺手术过程中,完成穿刺定位后往往需要进行复扫确认穿刺针的定位情况。当前,在采用机器人协助完成辅助穿刺导航定位过程中,穿刺导向装置多采用带圆孔的一体式导向装置,导致在完成穿刺定位后不能快速地释放穿刺针等手术器材;同时,由于末端导向装置会与进入人体的穿刺器械接触,需要为无菌状态,不同病患轮流使用时要求跟换便捷,当前多为结构为多螺钉固定且末端结构大而重,其拆卸、安装过程繁琐,导致医生操作不便捷和手术时间增加。
技术实现思路
0、[
技术实现要素:
]
1、本实用新型的目的就是要解决上述的不足而提供一种快速更换和释放的穿刺导向装置,实现了在采用机器人协助完成辅助穿刺导航定位过程中,穿刺导向装置对穿刺针的快速释放,以及不同病患轮转过程中,穿刺导向装置的快速更换、回收。
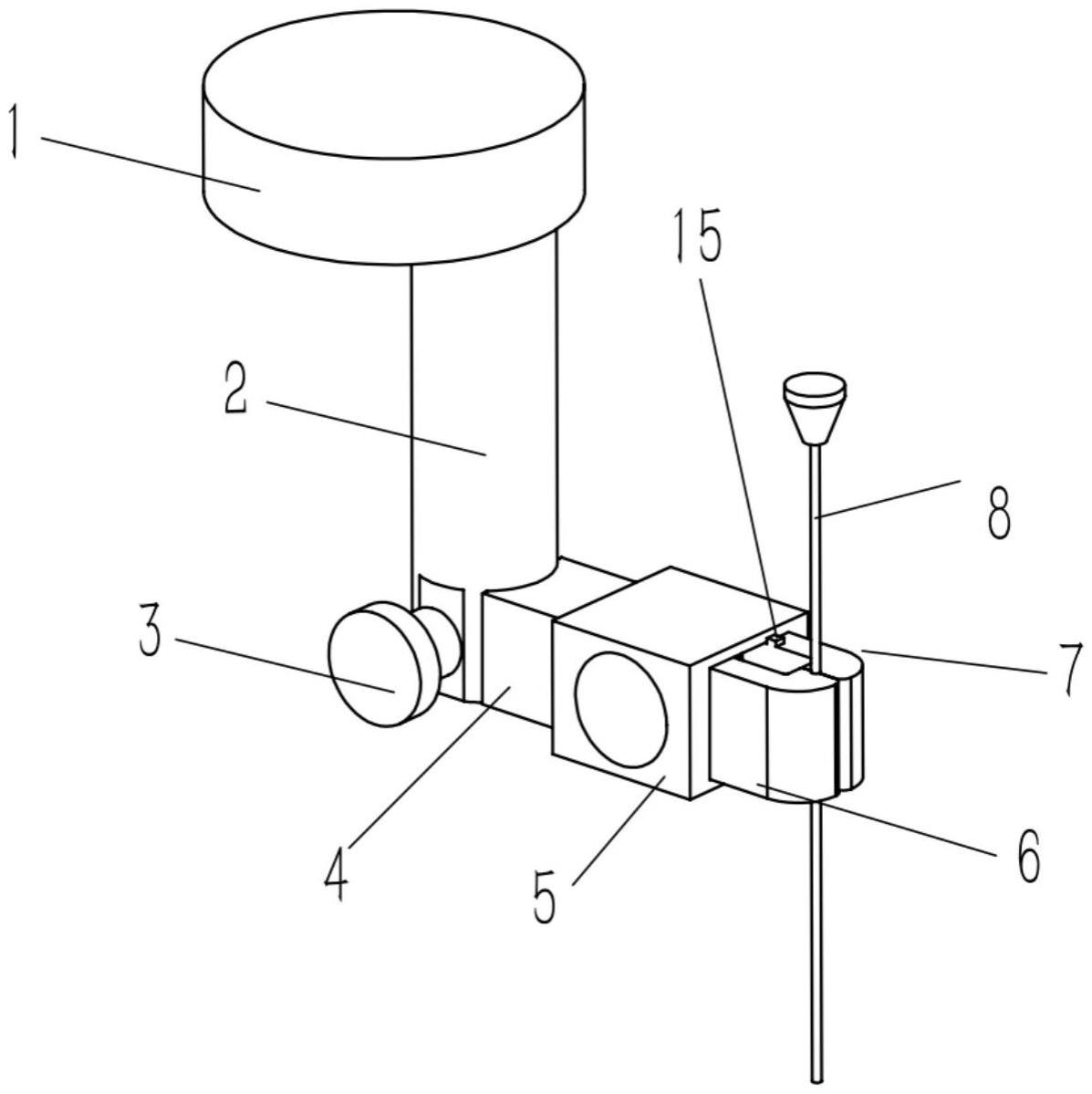
2、为实现上述目的设计一种快速更换和释放的穿刺导向装置,包括夹持座4、锁定套5、第一夹持臂6、第二夹持臂7、旋转轴9和弹簧10,所述夹持座4的一端用于连接连接杆2,所述夹持座4的另一端安装有旋转轴9,并通过旋转轴9连接第一夹持臂6和第二夹持臂7,所述第一夹持臂6和第二夹持臂7绕旋转轴9转动,所述旋转轴9上套装有弹簧10,所述弹簧10的两端分别与第一夹持臂6、第二夹持臂7连接,所述夹持座4上安装有锁定套5,所述锁定套5套装于夹持座4外围,并沿夹持座4前后滑动,所述锁定套5向前运动至第一夹持臂6与第二夹持臂7闭合,且闭合后的第一夹持臂6与第二夹持臂7之间形成用于固定穿刺针8的针孔,进而实现对穿刺针8的导向和夹持。
3、进一步地,所述第二夹持臂7处设有凸台15,所述凸台15设置在第二夹持臂7表面,或者设置在夹持座4或/和第一夹持臂6表面,所述锁定套5向前运动到与凸台15接触时则到达第一夹持臂6与第二夹持臂7处于闭合状态的锁定位置。
4、进一步地,所述第一夹持臂6与第二夹持臂7前部的接触面上分别设置有半圆槽11,两个半圆槽11在第一夹持臂6与第二夹持臂7接触处于闭合状态时组合形成用于固定穿刺针8的针孔。
5、进一步地,所述连接杆2底部开设有夹持座安装孔12,夹持座4末端安装于夹持座安装孔12中,且夹持座安装孔12不限于圆孔、矩形孔、菱形孔,连接杆2顶端固定连接有安装座1,并通过安装座1与机器人末端固定连接。
6、进一步地,所述连接杆2底部开设有锁紧孔13,所述锁紧孔13与夹持座安装孔12不限于垂直布置,所述锁紧孔13内连接有锁紧销3,所述夹持座4末端通过锁紧销3锁紧固定于连接杆2上。
7、进一步地,所述连接杆2前端面的夹持座安装孔12处设置有台阶14,所述夹持座4的上表面卡在台阶14上,进而使得针孔与连接杆2保持设定的角度。
8、进一步地,所述弹簧10采用扭簧、螺旋压簧或板簧,所述弹簧10在第一夹持臂6与第二夹持臂7闭合状态时处于压缩状态,所述第一夹持臂6与第二夹持臂7在锁定套5向后滑动后自动打开而转为释放状态。
9、进一步地,所述锁定套5内表面与夹持座4外表面配合连接,且锁定套5与夹持座4配合处的纵截面不限于正方形或圆形。
10、进一步地,所述锁定套5表面设置有凹槽,所述凹槽用于供操作者手指置于其中以操作锁定套5。
11、进一步地,所述夹持座4与连接杆2连接的表面设置有承台16,所述锁紧销3末端卡在承台16中,所述锁紧销3采用螺纹结构与连接杆2连接,或采用带固定座的插销结构与连接杆2连接。
12、本实用新型同现有技术相比,实现了在采用机器人协助完成辅助穿刺导航定位过程中,穿刺导向装置对穿刺针的快速释放,同时也实现了不同病患轮转过程中,穿刺导向装置的快速更换、回收,以及穿刺导向装置固定位置的一致性,大大提高了手术机器人辅助手术定位操作的便捷性、舒适性、准确性和安全性,缩短了器械跟换时间,且装置操作方便、易学,易于实施与推广。
13、综上,本实用新型在机器人辅助完成穿刺导航定位后快速释放穿刺针等手术器材,同时在不同病人使用时,实现快速更换,解决了当前采用机器人协助完成穿刺导航定位后,穿刺导向装置不能快速地释放穿刺针等手术器材,以及穿刺导向装置的更换无法做到快、便捷,以在病人轮转时能快速使用,更换后还需要保持定位精度的一致性等问题。
技术特征:
1.一种快速更换和释放的穿刺导向装置,其特征在于:包括夹持座(4)、锁定套(5)、第一夹持臂(6)、第二夹持臂(7)、旋转轴(9)和弹簧(10),所述夹持座(4)的一端用于连接连接杆(2),所述夹持座(4)的另一端安装有旋转轴(9),并通过旋转轴(9)连接第一夹持臂(6)和第二夹持臂(7),所述第一夹持臂(6)和第二夹持臂(7)绕旋转轴(9)转动,所述旋转轴(9)上套装有弹簧(10),所述弹簧(10)的两端分别与第一夹持臂(6)、第二夹持臂(7)连接,所述夹持座(4)上安装有锁定套(5),所述锁定套(5)套装于夹持座(4)外围,并沿夹持座(4)前后滑动,所述锁定套(5)向前运动至第一夹持臂(6)与第二夹持臂(7)闭合,且闭合后的第一夹持臂(6)与第二夹持臂(7)之间形成用于固定穿刺针(8)的针孔,进而实现对穿刺针(8)的导向和夹持。
2.如权利要求1所述的快速更换和释放的穿刺导向装置,其特征在于:所述第二夹持臂(7)处设有凸台(15),所述凸台(15)设置在第二夹持臂(7)表面,或者设置在夹持座(4)或/和第一夹持臂(6)表面,所述锁定套(5)向前运动到与凸台(15)接触时则到达第一夹持臂(6)与第二夹持臂(7)处于闭合状态的锁定位置。
3.如权利要求1所述的快速更换和释放的穿刺导向装置,其特征在于:所述第一夹持臂(6)与第二夹持臂(7)前部的接触面上分别设置有半圆槽(11),两个半圆槽(11)在第一夹持臂(6)与第二夹持臂(7)接触处于闭合状态时组合形成用于固定穿刺针(8)的针孔。
4.如权利要求1所述的快速更换和释放的穿刺导向装置,其特征在于:所述连接杆(2)底部开设有夹持座安装孔(12),夹持座(4)末端安装于夹持座安装孔(12)中,且夹持座安装孔(12)不限于圆孔、矩形孔、菱形孔,连接杆(2)顶端固定连接有安装座(1),并通过安装座(1)与机器人末端固定连接。
5.如权利要求4所述的快速更换和释放的穿刺导向装置,其特征在于:所述连接杆(2)底部开设有锁紧孔(13),所述锁紧孔(13)与夹持座安装孔(12)不限于垂直布置,所述锁紧孔(13)内连接有锁紧销(3),所述夹持座(4)末端通过锁紧销(3)锁紧固定于连接杆(2)上。
6.如权利要求4所述的快速更换和释放的穿刺导向装置,其特征在于:所述连接杆(2)前端面的夹持座安装孔(12)处设置有台阶(14),所述夹持座(4)的上表面卡在台阶(14)上,进而使得针孔与连接杆(2)保持设定的角度。
7.如权利要求1所述的快速更换和释放的穿刺导向装置,其特征在于:所述弹簧(10)采用扭簧、螺旋压簧或板簧,所述弹簧(10)在第一夹持臂(6)与第二夹持臂(7)闭合状态时处于压缩状态,所述第一夹持臂(6)与第二夹持臂(7)在锁定套(5)向后滑动后自动打开而转为释放状态。
8.如权利要求1所述的快速更换和释放的穿刺导向装置,其特征在于:所述锁定套(5)内表面与夹持座(4)外表面配合连接,且锁定套(5)与夹持座(4)配合处的纵截面不限于正方形或圆形。
9.如权利要求1所述的快速更换和释放的穿刺导向装置,其特征在于:所述锁定套(5)表面设置有凹槽,所述凹槽用于供操作者手指置于其中以操作锁定套(5)。
10.如权利要求5所述的快速更换和释放的穿刺导向装置,其特征在于:所述夹持座(4)与连接杆(2)连接的表面设置有承台(16),所述锁紧销(3)末端卡在承台(16)中,所述锁紧销(3)采用螺纹结构与连接杆(2)连接,或采用带固定座的插销结构与连接杆(2)连接。
技术总结
本技术涉及一种快速更换和释放的穿刺导向装置,包括夹持座、锁定套、第一夹持臂、第二夹持臂、旋转轴和弹簧,夹持座一端用于连接连接杆,另一端安装有旋转轴,并通过旋转轴连接第一夹持臂和第二夹持臂,第一夹持臂和第二夹持臂绕旋转轴转动,旋转轴上套装有弹簧,弹簧两端分别与第一夹持臂、第二夹持臂连接,夹持座上套装有锁定套,锁定套沿夹持座前后滑动,锁定套向前运动至第一夹持臂与第二夹持臂闭合,闭合后的两个夹持臂形成用于固定穿刺针的针孔,进而实现对穿刺针的导向和夹持;本技术实现了在采用机器人协助完成辅助穿刺导航定位过程中,穿刺导向装置对穿刺针的快速释放,以及不同病患轮转过程中,穿刺导向装置的快速更换、回收。
技术研发人员:方春富
受保护的技术使用者:上海睿触科技有限公司
技术研发日:20221202
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!