肘关节训练器的制作方法
本技术涉及医疗器械,特别涉及一种肘关节训练器。
背景技术:
1、对于一些手部受伤的患者而言,在后续的康复治疗过程中,有的需要对手臂进行屈伸训练,在屈伸运动过程中可以实现对肘关节的训练,从而有助于患者快速康复。现有的肘关节训练器,一般是将小手臂固定在手臂托件后,使手臂托件发生摆动,从而带动小手臂相对大手臂摆动,实现肘关节的屈伸训练。然而,这种的肘关节训练器通常是由患者自己或者医生手动驱使手臂托件摆动来进行训练,这样使得操作费力繁琐,使用不方便。
技术实现思路
1、本实用新型的主要目的是提供一种肘关节训练器,旨在可以在训练时操作更加简单省力,提升使用的便利性。
2、为实现上述目的,本实用新型提出的肘关节训练器,包括:
3、壳体,所述壳体内形成有安装空间;
4、驱动件,所述驱动件安装于所述安装空间内;以及
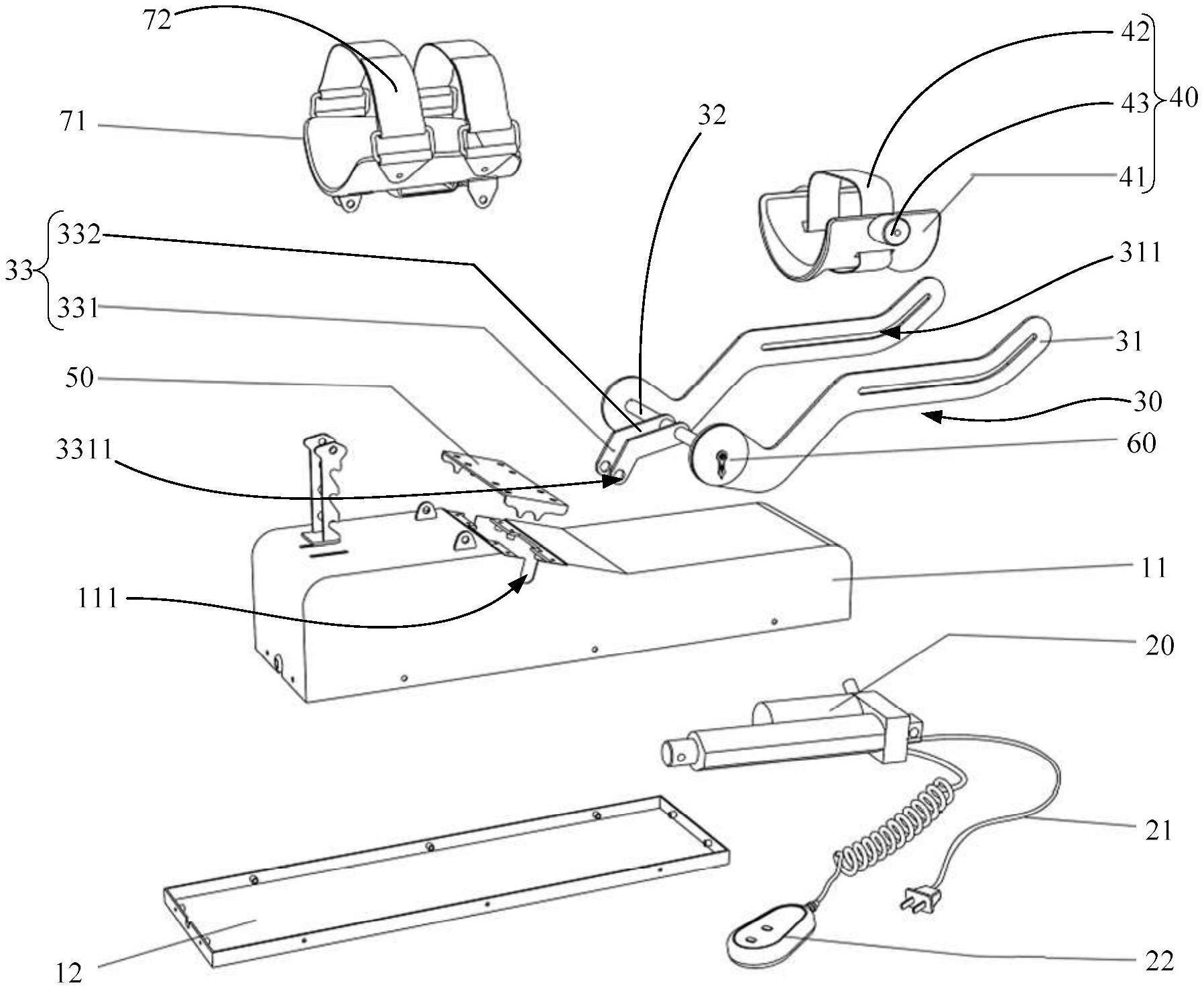
5、摆动架,所述摆动架包括支撑杆、转动轴和连接臂,所述转动轴安装于所述壳体,所述连接臂设于所述安装空间内,所述连接臂的一端连接于所述驱动件,另一端连接所述转动轴,所述支撑杆设于所述安装空间外,并与所述转动轴连接,所述支撑杆设有用以固定小手臂的第一固定件,所述驱动件直线伸缩运动,并通过所述连接臂带动所述转动轴转动,以使所述支撑杆相对所述壳体摆动。
6、可选地,所述壳体凹陷形成有凹槽,所述转动轴可转动地设于所述凹槽,所述转动轴的端部伸出所述凹槽,并位于所述壳体外,所述支撑杆连接于所述转动轴的端部。
7、可选地,所述肘关节训练器还包括盖板,所述盖板可拆卸连接于所述壳体,并且盖合于所述凹槽的槽口处,以使所述转动轴可转动地固定于所述凹槽。
8、可选地,所述转动轴连接有所述支撑杆的端部的端面设有角度显示器。
9、可选地,所述连接臂垂直于所述转动轴,所述连接臂包括呈夹角设置第一连接段和第二连接段,所述第一连接段的一端与所述驱动件连接,另一端与所述第二连接段连接,所述第二连接段远离所述第一连接段的一端与所述转动轴连接。
10、可选地,所述第一连接段的一端开设有连接孔,所述摆动架还包括连接轴,所述连接轴穿过所述连接孔与所述驱动件连接。
11、可选地,所述连接臂的数量为两个,两个所述连接臂相对设置,所述驱动件的一端设于两个所述连接臂之间。
12、可选地,所述第一固定件包括托板、扣板和活动柱,所述扣板与所述托板连接并围合形成有供小手臂固定的空间,所述活动柱设于所述托板的侧部,所述支撑杆开设有活动孔,所述活动孔的延伸方向与所述支撑杆的延伸方向相同,所述活动柱插入所述活动孔内,并可通过锁紧件与所述支撑杆锁紧或者放松,以使所述第一固定件相对所述支撑杆固定或者相对所述支撑杆翻转。
13、可选地,所述肘关节训练器还包括用以固定大手臂的第二固定件,所述第二固定件安装在所述壳体上,所述第二固定件包括固定板和绑带,所述绑带与所述固定板连接并围合形成有供大手臂固定的空间。
14、可选地,所述固定板具有用以支撑大手臂的支撑面,所述支撑面上设有软垫。
15、本实用新型技术方案的肘关节训练器,在训练使用过程中,患者可以先将小手臂固定在第一固定件上。训练时,启动驱动件,驱动件进行直线伸缩运动,从而可以通过连接臂带动转动轴进行转动,转动轴转动便可以带动支撑杆相对壳体进行摆动,进而使得设置在支撑杆上的第一固定件也能够跟随着摆动,这样便带着小手臂摆动,实现对肘关节的屈伸训练。该结构中,由于通过驱动件、连接臂、转动轴和支撑杆将直线运动转化为训练所需的弧线运动,无需患者或者医生手动驱使第一固定件运动来训练,从而使得训练时的操作更加简单省力,大大提升了使用的便利性。
技术特征:
1.一种肘关节训练器,其特征在于,包括:
2.如权利要求1所述的肘关节训练器,其特征在于,所述壳体凹陷形成有凹槽,所述转动轴可转动地设于所述凹槽,所述转动轴的端部伸出所述凹槽,并位于所述壳体外,所述支撑杆连接于所述转动轴的端部。
3.如权利要求2所述的肘关节训练器,其特征在于,所述肘关节训练器还包括盖板,所述盖板可拆卸连接于所述壳体,并且盖合于所述凹槽的槽口处,以使所述转动轴可转动地固定于所述凹槽。
4.如权利要求2所述的肘关节训练器,其特征在于,所述转动轴连接有所述支撑杆的端部的端面设有角度显示器。
5.如权利要求1所述的肘关节训练器,其特征在于,所述连接臂垂直于所述转动轴,所述连接臂包括呈夹角设置第一连接段和第二连接段,所述第一连接段的一端与所述驱动件连接,另一端与所述第二连接段连接,所述第二连接段远离所述第一连接段的一端与所述转动轴连接。
6.如权利要求5所述的肘关节训练器,其特征在于,所述第一连接段的一端开设有连接孔,所述摆动架还包括连接轴,所述连接轴穿过所述连接孔与所述驱动件连接。
7.如权利要求5所述的肘关节训练器,其特征在于,所述连接臂的数量为两个,两个所述连接臂相对设置,所述驱动件的一端设于两个所述连接臂之间。
8.如权利要求1至7任一项所述的肘关节训练器,其特征在于,所述第一固定件包括托板、扣板和活动柱,所述扣板与所述托板连接并围合形成有供小手臂固定的空间,所述活动柱设于所述托板的侧部,所述支撑杆开设有活动孔,所述活动孔的延伸方向与所述支撑杆的延伸方向相同,所述活动柱插入所述活动孔内,并可通过锁紧件与所述支撑杆锁紧或者放松,以使所述第一固定件相对所述支撑杆固定或者相对所述支撑杆翻转。
9.如权利要求1至7任一项所述的肘关节训练器,其特征在于,所述肘关节训练器还包括用以固定大手臂的第二固定件,所述第二固定件安装在所述壳体上,所述第二固定件包括固定板和绑带,所述绑带与所述固定板连接并围合形成有供大手臂固定的空间。
10.如权利要求9所述的肘关节训练器,其特征在于,所述固定板具有用以支撑大手臂的支撑面,所述支撑面上设有软垫。
技术总结
本技术公开一种肘关节训练器,该肘关节训练器包括壳体、驱动件以及摆动架,壳体内形成有安装空间;驱动件安装于安装空间内;摆动架包括支撑杆、转动轴和连接臂,转动轴安装于壳体,连接臂设于安装空间内,连接臂的一端连接于驱动件,另一端连接转动轴,支撑杆设于安装空间外,并与转动轴连接,支撑杆设有用以固定小手臂的第一固定件,驱动件直线伸缩运动,并通过连接臂带动转动轴转动,以使支撑杆相对壳体摆动。本技术技术方案的肘关节训练器在训练时操作更加简单省力,提升了使用的便利性。
技术研发人员:田野,次晓峰
受保护的技术使用者:河北大艾智能科技股份有限公司
技术研发日:20221205
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!