智能避障消毒巡检机器人
本技术涉及消毒设备,具体为智能避障消毒巡检机器人。
背景技术:
1、公共场所人员密集且流动性大,为各种致病源的散播提供了良好的媒介。如医院、学校的公共教室等场所,对于这些大型场所若环境消毒不彻底将造成巨大的社会危害。
2、目前,室内地面消毒一般都是由人工完成,但是在消毒的过程中还存在以下问题:
3、现有的人工消毒时耗时耗力,人工劳动强度大,消杀效率低,因此涉及到智能避障消毒巡检机器人用于现有的消毒设备技术领域中是很有必要的。
技术实现思路
1、(一)解决的技术问题
2、针对现有的人工消毒时耗时耗力,人工劳动强度大,消杀效率低的问题,本实用新型提供了智能避障消毒巡检机器人,具备减少人工成本,提高消杀效率的优点,以解决背景技术提出的问题。
3、(二)技术方案
4、为实现上述的目的,本实用新型提供如下技术方案:
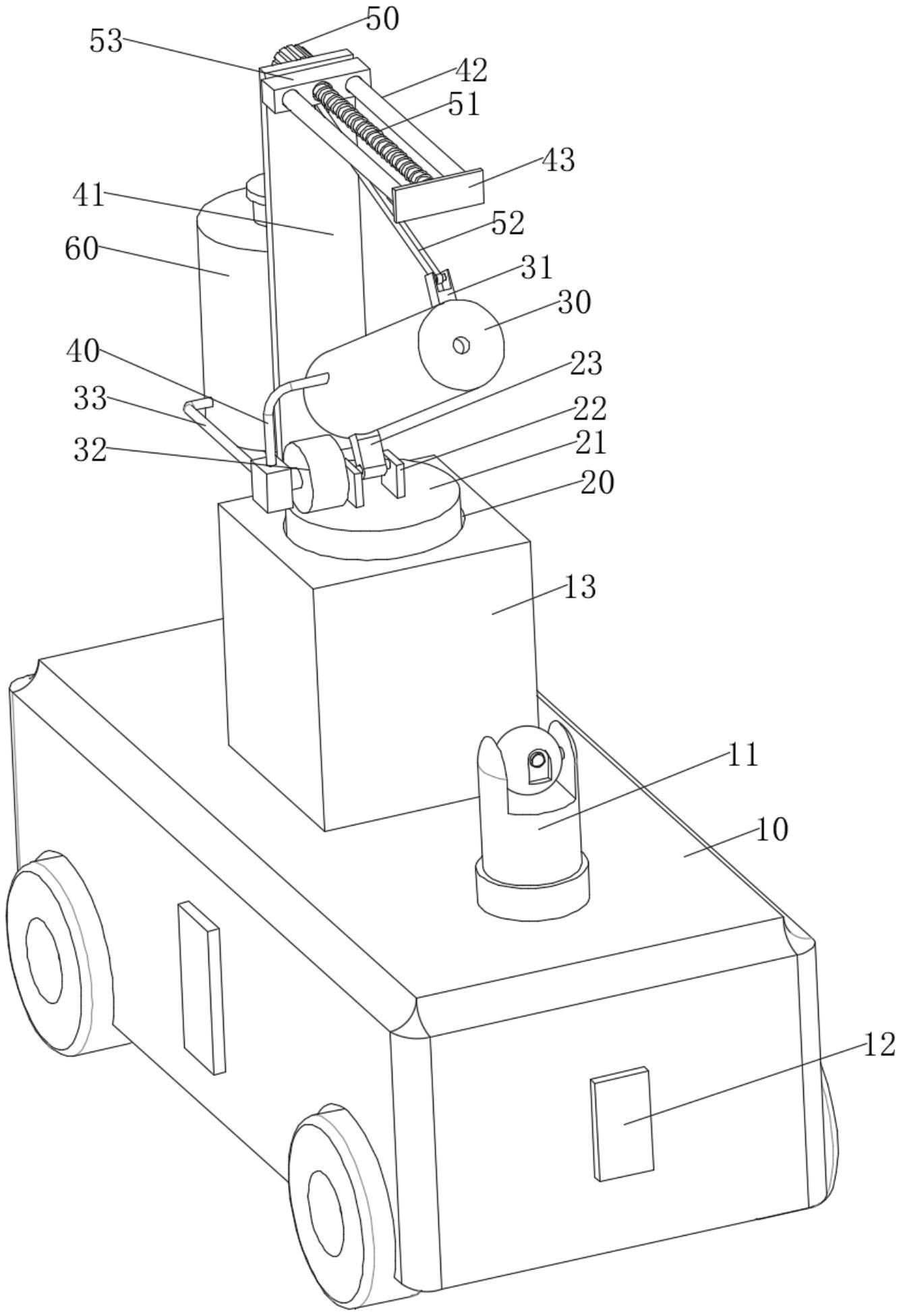
5、智能避障消毒巡检机器人,包括自动巡检车体和转动盘以及喷枪,所述的转动盘上固定装配有第一装配板,喷枪的底部下部固定装配有转动块,转动块与第一装配板进行活动装配,喷枪的表面上部固定装配有第二装配板,转动盘上固定装配有支撑板,支撑板上固定装配有竖板,竖板上对称固定装配有连接杆,两个连接杆的一端固定装配有安装板,竖板上固定装配有操作电机,操作电机的输出端固定装配有丝杆,丝杆活动贯穿竖板,并且丝杆在两个连接杆之间进行转动,连接杆上活动装配有活动块,活动块与丝杆进行齿纹装配。
6、优选的,所述的活动块的底部固定装配有第三装配板,第三装配板上活动装配有牵引杆,牵引杆的另一端与第二装配板进行活动装配。
7、优选的,所述的支撑板上固定装配有储液罐,转动盘上固定装配有水泵,水泵上固定装配有第一输送管和第二输送管,第一输送管的另一端与储液罐进行固定装配,第二输送管的另一端与喷枪进行固定装配。
8、优选的,所述的自动巡检车体上固定装配有连接台,连接台的表面设置有转动槽,连接台的内部设置有安装腔,安装腔的底面固定装配有转动电机。
9、优选的,所述的转动电机的输出端固定装配有转动杆,转动杆活动贯穿连接台到转动槽中,并且转动杆固定装配在转动盘的底部。
10、优选的,所述的自动巡检车体上固定装配有摄像头,自动巡检车体的侧面固定装配有传感器。
11、(三)有益效果
12、与现有技术对比,本实用新型具备以下有益效果:
13、本实用新型中智能避障消毒巡检机器人,自动巡检车体在使用中,通过摄像头可以对物体进行识别,传感器可以有效地对障碍物进行避让,遇到需要消毒的物体,启动转动电机,使得转动杆带动转动盘进行转动,启动操作电机,丝杆在活动块上转动,让活动块在连接杆上移动,方便牵引杆拉动喷枪调节喷枪的高度,使得喷枪靠近需要消毒的物体,启动水泵,第一输送管将储液罐内部的消毒液抽出再由第二输送管抽入到喷枪中,方便喷枪对需要消毒的物体进行喷洒。
技术特征:
1.智能避障消毒巡检机器人,包括自动巡检车体(10)和转动盘(21)以及喷枪(30),
2.根据权利要求1所述的智能避障消毒巡检机器人,其特征在于:所述的活动块(53)的底部固定装配有第三装配板(71),第三装配板(71)上活动装配有牵引杆(52),牵引杆(52)的另一端与第二装配板(31)进行活动装配。
3.根据权利要求2所述的智能避障消毒巡检机器人,其特征在于:所述的支撑板(70)上固定装配有储液罐(60),转动盘(21)上固定装配有水泵(32),水泵(32)上固定装配有第一输送管(33)和第二输送管(40),第一输送管(33)的另一端与储液罐(60)进行固定装配,第二输送管(40)的另一端与喷枪(30)进行固定装配。
4.根据权利要求3所述的智能避障消毒巡检机器人,其特征在于:所述的自动巡检车体(10)上固定装配有连接台(13),连接台(13)的表面设置有转动槽(20),连接台(13)的内部设置有安装腔(61),安装腔(61)的底面固定装配有转动电机(62)。
5.根据权利要求4所述的智能避障消毒巡检机器人,其特征在于:所述的转动电机(62)的输出端固定装配有转动杆(63),转动杆(63)活动贯穿连接台(13)到转动槽(20)中,并且转动杆(63)固定装配在转动盘(21)的底部。
6.根据权利要求5所述的智能避障消毒巡检机器人,其特征在于:所述的自动巡检车体(10)上固定装配有摄像头(11),自动巡检车体(10)的侧面固定装配有传感器(12)。
技术总结
本技术涉及消毒设备技术领域,且公开了智能避障消毒巡检机器人包括自动巡检车体和转动盘以及喷枪,所述的转动盘装配有第一装配板,喷枪装配有转动块,转动块与第一装配板装配,喷枪装配有第二装配板,转动盘装配有支撑板,支撑板装配有竖板,竖板装配有连接杆,两个连接杆的一端固定装配有安装板,竖板装配有操作电机,操作电机装配有丝杆,连接杆装配有活动块,活动块与丝杆装配,活动块装配有第三装配板,第三装配板装配有牵引杆,牵引杆的另一端与第二装配板进行活动装配,上述智能避障消毒巡检机器人通过牵引杆和丝杆的配合解决了现有的人工消毒时耗时耗力,人工劳动强度大,消杀效率低的问题。
技术研发人员:邹华宇,王剑,山子岐
受保护的技术使用者:昆明理工大学
技术研发日:20221213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!